基于LSTM神经网络和时空运动距离算法的船舶轨迹拼接方法与流程
本发明涉及船舶跟踪识别领域,特别涉及基于lstm神经网络和时空运动距离算法的船舶轨迹拼接方法。
背景技术:
1、ais(automatic identification system)自动识别系统,是一种用于航行安全和船舶流量管理的无线电通信系统。ais系统的发射设备可自动地在指定频率上周期性地发送船舶的身份信息、导航信息等数据,接收设备可以接收其他船舶、岸基设施和卫星系统发射的ais信息。ais是一项重要的技术,已经被装备于绝大多数的商用船只上,使得船舶之间的交流更加高效便捷。ais数据已成为海事部门和相关企业监管船舶位置和动态的重要依据,在船舶流量管理、安全监控、决策支持等领域发挥着越来越重要的作用。
2、岸海雷达是一种用于在海上监测船只目标的雷达系统,其主要功能是通过发射并接收高频电磁波,在广阔的海域范围内监测运行中的船只,并及时获取其位置、速度、方向等信息,实现海上交通、安全监测。
3、船舶轨迹融合技术是将多个传感器(如雷达、ais)获得的船舶位置信息进行整合和融合,以提高位置信息的准确性和可靠性。在多传感器、复杂环境下,融合技术可以消除单个传感器存在的局限性和错误,提高对船舶动态行驶轨迹的感知和识别能力,进而优化船舶的导航路径和安全管理。
4、某海上预警监控系统实时接收融合后的船舶信息,包括目标唯一标识target_id、mmsi(maritime mobile service identity海上移动通信业务标识)、船舶呼号、船舶名称、目的地、经度、纬度、对地速度、对地航向、航首向、当前时间等。
5、在现实条件下,部分船只为了躲避监管,人为关闭船上ais设备,导致不能通过ais设备获取船只信息。雷达在跟踪这样的目标船时,由于受大船遮挡或天气等因素影响,会存在目标船被跟丢的情况。当目标船被再次跟踪时,会被识别为一个新的目标,并对船舶航迹赋予新的编号(target_id),这样会存在同一条船有多个航迹的问题。如何快速准确地将同一条船多个航迹段进行拼接,成为一大难题。
6、为实现船舶航迹拼接,现有技术主要采取以下技术手段:
7、一、采用时间-空间算法(time-space algorithm):
8、例如,申请人为中国船舶重工集团公司第七一五研究所、公开号为cn113702979a、专利名称为一种跨区目标跟踪轨迹片段时空拼接方法的专利申请,其方法包含以下步骤:对需要关联的跨区目标轨迹段提取时间、方位、距离、主要线谱特征形成特征集,并统计该段轨迹内特征,形成特征集和对应的统计量,利用预测方法对目标轨迹段特征集合中的时间、方位、距离相关时空特征进行轨迹预测或反向推导;对预测反推的特征向量依据同一个物体在同一时间不能出现在两个不同的位置和移动必须是连续不能突变得排它性进行初步关联,然后对初步关联上的目标进行谱结构匹配、统计值相关加权综合性判断,当综合关联系数大于给定阈值比较,判断为同一目标轨迹,从而形成跨区的同一目标连续的长轨迹。
9、上述技术方案是使用时间和位置信息来判断两个轨迹点是否应该进行拼接的方法。通过计算两个位置点之间的距离和时间差,将时间和空间信息结合起来进行匹配。这种算法比较简单易行,但由于考虑的因素只有时间和位置信息,因此准确性较差。
10、二、采用粒子滤波算法(particle filter algorithm):
11、粒子滤波轨迹拼接算法(particle filter trajectory fusion algorithm)是一种基于贝叶斯滤波理论的轨迹拼接算法,用于将周边多个船舶轨迹点进行融合。该算法通过从观测数据中随机采样多个“粒子”,然后通过蒙特卡洛方法迭代估计出真实的轨迹。该算法只考虑的位置和速度信息,因此准确性较差。
12、三、基于图论的算法(graph-based algorithm):
13、该算法将轨迹拼接问题转化为图形匹配问题,并通过最短路径方法进行计算。该方法能够处理多船舶的情况,但容易受到环境、噪声等因素的影响。
技术实现思路
1、本发明的目的在于克服现有技术的缺点与不足,提供基于lstm神经网络和时空运动距离算法的船舶轨迹拼接方法。
2、本发明的目的通过以下的技术方案实现:
3、基于lstm神经网络和时空运动距离算法的船舶轨迹拼接方法,包括以下步骤:
4、1)通过ais接收设备采集船舶连续轨迹数据,作为lstm轨迹预测模型的训练和验证数据;通过雷达设备采集船舶轨迹数据,作为待拼接数据;
5、2)建立lstm轨迹预测模型,使用ais接收设备采集的船舶连续轨迹的历史数据,依据时间正序、逆序分别进行lstm轨迹预测模型的正向、反向模型的训练和验证;
6、3)将雷达观测到的某个船舶的轨迹作为研究对象,输入到lstm轨迹预测模型进行预测;
7、4)预测的结果再和雷达观测到的其它船舶轨迹通过轨迹拼接算法进行拼接,并返回拼接结果。
8、所述步骤1),具体为:
9、11)对ais接收设备采集船舶连续轨迹数据进行过滤,形成包含船舶标识、采集时间、经度坐标、纬度坐标、对地航向、对地速度的向量;
10、12)对于经步骤11)过滤后的轨迹数据,分别对经度坐标、纬度坐标、对地航向、对地速度进行归一化处理;
11、13)对步骤12)形成的归一化后的每一条轨迹,按照时间正序排列,形成时间正序归一化轨迹;
12、14)对步骤12)形成的归一化后的每一条轨迹,按照时间逆序排列,形成时间逆序归一化轨迹;
13、15)对步骤13)、14)的每一条轨迹,采用每k个轨迹点作为样本,后续第k+1个轨迹点作为标签,依此类推,形成数据集;
14、16)对步骤15)形成的数据集,取特征向量[longitude、latitude、cog、sog],按照预设比例,分别形成正序和逆序的训练集和验证集;其中,longitude为经度坐标,latitude为纬度坐标,cog为对地航向,sog为对地速度。
15、步骤11)中,所述对ais接收设备采集船舶连续轨迹数据进行过滤,包括去除轨迹点少于300的轨迹;去除静止状态数据、去除采集时间间隔大于30的轨迹数据。
16、所述步骤2),具体为:
17、21)构建lstm轨迹预测模型框架,所述lstm轨迹预测模型包括1个lstm层、一个dense层,其中:lstm隐藏层尺寸为108,输入数据有3个维度,分别是[batch_size, window_size, feature_size],其中:batch_size指批次大小;window_size指窗口大小;feature_size指特征向量的维度,即经度、纬度、航向、航速;
18、22)调节超参数、损失函数、优化器来优化lstm轨迹预测模型,在进行模型训练前,需要设置模型有关的超参数;模型优化器采用使用adam优化器,损失函数采用mse损失函数;使用准确率作为模型评价函数;设置训练epoch为20,batch_size为32;
19、23)根据步骤22)搭建的lstm轨迹预测模型,使用步骤1)处理好的训练数据集进行训练,使用步骤1)的验证数据集上进行验证,将预测效果最好的lstm轨迹预测模型保存为最优化模型,即完成lstm轨迹预测模型的构建;这里分别训练两个模型,分别为时间正序模型和时间逆序模型。
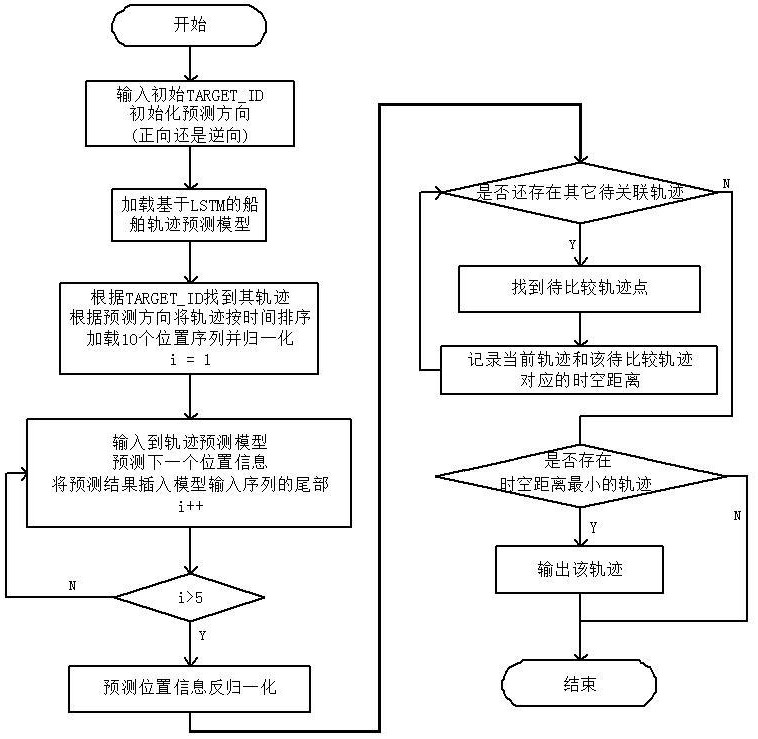
20、所述步骤3),具体为:
21、31)首先确定预测方向为正向预测还是逆向预测;
22、32)将指定待拼接的雷达轨迹根据轨迹预测方向进行排序,正向预测按时间正顺排序,逆向预测按时间逆序排序;
23、33)根据预测方向,将雷达轨迹数据按时间正序或逆序排序,选择最后10个轨迹点的信息,同时记录最后一个轨迹点的时间,记为time1;
24、34)将步骤33)得到的雷达轨迹数据进行归一化;
25、35)将步骤34)得到的轨迹数据作为相应的lstm轨迹预测模型正序或逆序输入,做一次预测,将预测结果循环作为lstm轨迹预测模型的输入,预测下一个位置的数据,循环预测若干次,得到最后一个位置的数据[longitude’, latitude’,cog’,sog’],longitude’为该位置的经度坐标,latitude’为该位置的纬度坐标,cog’为该位置的对地航向,sog’为该位置的对地速度;然后进行反归一化处理,得到最终的预测位置数据[longitude1、latitude1、cog1、sog1],longitude1为最终的预测位置的经度坐标,latitude1为最终的预测位置的纬度坐标,cog1为最终的预测位置的对地航向,sog1为最终的预测位置的对地速度。
26、步骤4)中,所述轨迹拼接具体为:
27、41)从雷达观测的剩余轨迹中的每个轨迹头或尾信息[time2,longitude2,latitude2,cog2,sog2],time2为剩余轨迹中的每个轨迹头或尾的时间,longitude2为剩余轨迹中的每个轨迹头或尾的经度坐标,latitude2为剩余轨迹中的每个轨迹头或尾的纬度坐标,cog2为剩余轨迹中的每个轨迹头或尾的对地航向,sog2为剩余轨迹中的每个轨迹头或尾的对地速度;
28、计算剩余轨迹中的每个轨迹头或尾与最终的预测位置的时间距离,对于正向拼接,满足time2-time1>0 且time2-time1≤240,对于逆向拼接,满足time2-time1<0 且time2-time1≥-240;
29、42)对于每个满足步骤41)的轨迹点,分别跟由步骤35)得到的位置数据进行轨迹点间的4维向量间的欧式距离,并根据向量的重要度,乘以一定的权重系数,求和,得到综合距离,计算公式为:
30、l_i=α1|longitude2-longitude1|+α2|latitude2-latitude1|+α3|cog2-cog1|+α4|sog2-sog1|;
31、其中,i= 1...n,n为轨迹条数,α1、α2、α3、α4为权重系数,取值分别为1000、1000、1、1。
32、43)从步骤42)中的n个计算结果中,找出取值最小的l_i,该l_i对应的轨迹即为要拼接的下一条轨迹。
33、同时,本发明提供:
34、一种服务器,所述服务器包括处理器和存储器,所述存储器中存储有至少一段程序,所述程序由所述处理器加载并执行以实现上述基于lstm神经网络和时空运动距离算法的船舶轨迹拼接方法。
35、一种计算机可读存储介质,所述存储介质中存储有至少一段程序,所述程序由处理器加载并执行以实现上述基于lstm神经网络和时空运动距离算法的船舶轨迹拼接方法。
36、本发明与现有技术相比,具有如下优点和有益效果:
37、1、本发明采用了轨迹预测算法和时空距离算法相结合的方式,弥补了算法单一的不足。
38、2、本发明的算法实现中不仅考虑了时间和空间因素,同时考虑船舶的运动特征(如航向和航速),提高了算法的准确率。
39、3、本发明提供了正序拼接和逆序拼接两种方式,两种方式可交叉验证,进一步验证了算法的准确性。
- 还没有人留言评论。精彩留言会获得点赞!