一种基于非相干数字全息的三维位移测量系统及方法
本发明属于三维位移测量,具体涉及一种基于非相干数字全息的三维位移测量系统及方法。
背景技术:
1、三维位移测量技术在工业检测、建筑设计、生物医学成像和地质力学等领域具有广泛的应用,随着超精密制造业、半导体工业、航天工业、生物医学等领域的发展,对于精密元件和生物组织位移的测量具有重要意义。
2、目前的三维位移测量技术主要分为接触式测量和非接触式测量,对于超精密元件或者生物组织的位移测量,传统的接触式位移测量方法由于不可避免的接触力作用可能会造成精密元件和生物组织的损坏。基于数字全息的非接触测量既不会损伤测量物体表面,也不需要多次扫描和机械移动,具有高精度、无损伤、全场和动态测量的优点。
3、与传统的成像系统不同,数字全息记录了物体的空间三维信息,基于重建算法可以实现较长的轴向观测距离。然而,基于干涉原理的数字全息只对光轴方向具有较高的灵敏度,而对垂直于光轴方向上的变形不敏感,因此单一的数字全息装置只能实现一维方向上的位移测量。为了解决这一问题,研究人员提出了使用三套数字全息装置分别对三个维度上的位移进行测量、将立体摄影测量技术与数字全息相结合、以及使用三束物光与一束参考光在一个ccd平面上形成数字全息图等方案。然而这些方案需要采用多个ccd或者多束照明光,并且需要处理大量的数据,系统结构复杂、成本高且耗时。
4、目前,基于数字全息的干涉测量技术采用相干光源,并且测量通常在实验室中的隔振光学平台中进行,因此极大限制了三维位移测量技术在一些场合的实际应用。与此同时,激光的高相干性还会在全息图中引入散斑噪声,从而影响成像质量,会极大影响三维位移的测量精度。
技术实现思路
1、为解决上述技术问题,本发明提供了一种基于非相干数字全息的三维位移测量系统及方法。
2、具体方案如下:
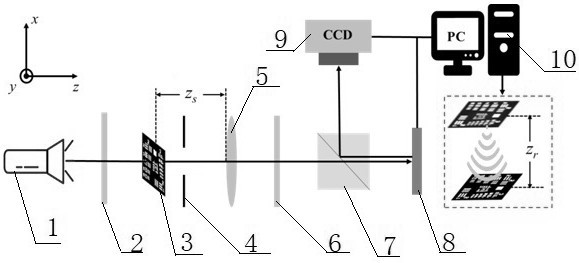
3、基于非相干数字全息的三维位移测量系统,包括非相干光源、带通滤波片,待测物体,孔径光阑,准直透镜,偏振片、分束立方、空间光调制器、电荷耦合器件和计算机;其中电荷耦合器件和空间光调制器均与计算机通信连接;
4、所述非相干光源用于给非相干数字全息系统提供照明光源;
5、所述带通滤波片用于非相干光源的滤波,滤波后的光源照射待测物体,从而携带物体的三维信息;
6、所述孔径光阑用于消除杂散光和噪声;
7、所述偏振片用于将自然光转变为线偏振光;
8、所述空间光调制器通过计算机加载双透镜相位掩膜用于实现光束的分光和相移;
9、所述电荷耦合器件用于记录经过空间光调制器和分束立方反射后的干涉条纹,并将记录的图像传递给计算机,通过计算机进行处理。
10、所述非相干光源为是自然光、led光源或氙灯光源,非相干光源的输出光谱范围覆盖380 ~760 nm。
11、所述带通滤波片的中心波长范围为380 ~760 nm,带宽≤ 20 nm。
12、所述偏振片的方向调节与空间光调制器的偏振敏感轴方向相一致。
13、所述计算机用于模拟衍射获得待测物体的重建像。
14、基于非相干数字全息的三维位移测量方法包括面外位移测量方法和面内位移测量方法。
15、所述面外位移测量方法,包括以下步骤:
16、s1):将待测物体的初始位置设为参考原点,利用菲涅尔非相干相关数字全息成像系统拍摄待测物体的三张相移全息图,并将三张相移全息图传输给计算机;
17、s2):利用三步相移算法对三张相移全息图进行计算获得待测物体的复合全息图,利用对比度评价函数对待测物体的复合全息图进行计算,获得待测物体的最佳重建距离 z r;
18、s3):构建待测物体轴向观测距离 zs和最佳重建距离 zr的数学模型,获得待测物体位移前的观测距离 z s1;
19、s4):当待测物体沿光轴方向移动一定距离后,重复步骤s1)至s3),获得待测物体位移后的观测距离 z s2;
20、s5):待测物体位移后的观测距离 z s2减去待测物体位移前的观测距离 z s1即为物体的面外位移。
21、步骤s3)中,轴向观测距离 z s和最佳重建距离 z r的数学模型,可表示为:
22、
23、其中
24、
25、式中, z h是空间光调制器和电荷耦合器之间的距离, f d1和 f d2分别为加载在空间调制器slm上的双透镜掩膜的焦距; f0是准直透镜l的焦距; d是透镜l和空间光调制器之间的距离。
26、面内位移测量方法,包括以下步骤:
27、p1):将待测物体的初始位置设为参考原点,利用菲涅尔非相干相关数字全息成像系统拍摄待测物体的三张相移全息图,并将三张相移全息图传输给计算机;
28、p2):用三步相移算法对三张相移全息图进行计算获得待测物体的复合全息图,并利用角谱衍射算法对复合全息图进行计算获得待测物体位移前的重建像;
29、p3):当待测物体沿垂直光轴方向移动一定距离后,重复步骤p1)至p2),获得待测物体位移后的重建像;
30、p4):利用二维数字图像相关(2d-dic)算法对位移前后的两张重建像进行计算,获得待测物体的面内位移。
31、步骤p4)中,利用二维数字图像相关(2d-dic)算法对位移前后的两张重建像进行计算,包括以下步骤:
32、t1):在位移前待测物体的重建像中指定一个感兴趣区域(roi),并在感兴趣区域中指定一个中心点为 p( x, y) 、像素数(2m+1) × (2m+1)的参考子集,m为自然数;
33、t2):利用零均值归一化平方差准则(znssd)判断位移后重建像中与上述参考子集对应最相似的部分,找到参考子集中心点 p( x, y)的位移,从而确定待测物体的面内位移。
34、所述零均值归一化平方差准则(znssd)表示为:
35、
36、式中 p= ( u, u x, u y, v, v x, v y)t代表位移向量,其中 u和 v分别代表两个位移分量, u x, u y, v x, v y分别代表子集的四个位移梯度分量; f( x i, y j)和 g( x' i, y' j)分别代表参考子集中坐标点( x i, y j)和目标子集中坐标点( x' i, y' j)的灰度值; fm和 gm分别代表参考子集和目标子集的平均强度值。
37、与现有技术相比,本发明的有益效果在于:
38、1、现有基于数字全息的三维位移测量方法需要使用三套数字全息装置,本发明采用一套简单的、共路菲涅尔非相干相关数字全息系统作为测量装置,通过建立非相干全息重建过程中重建距离 z r和观测距离 z s的数学模型来获得面外位移的测量结果,通过利用2d-dic算法对位移前后的重建像进行处理获得面内位移的测量结果,仅利用一套实验装置便可以同时实现三维位移测量。
39、2、基于数字全息的干涉测量技术采用相干光源,并且测量通常在实验室中的隔振光学平台中进行,因此极大限制了三维位移测量技术在一些场合的实际应用。本发明采用非相关光源作为照明光源,极大减轻了对照明光源的需求,可适用于自然光照明下的场合。
40、3、激光的高相干性会在全息图中引入散斑噪声,从而影响成像质量,极大影响三维位移的测量精度,本发明采用的菲涅尔非相干相关数字全息成像系统不仅具有无散斑特性,还具有高横向分辨率特性,可以极大提高三维位移的测量精度。
- 还没有人留言评论。精彩留言会获得点赞!