内河船舶高精度定姿定位的系统的制作方法
本技术涉及船舶定姿定位的,尤其是涉及一种内河船舶高精度定姿定位的系统。
背景技术:
1、船舶航行过程中,其姿态由六个自由度来决定,分别为:横荡、纵荡、垂荡、横摇、纵摇、艏摇,如图1示出的船舶姿态六个自由度的示意图所示,上述六个自由度分别对应的是横向移动、纵向移动、垂直方向移动、绕纵轴横向转动、绕横轴纵向转动、绕竖轴水平转动。从图1中可以看出,横荡(sway)为沿图中yb轴左右平动;纵荡(surge)为沿图中xb轴前后平动;垂荡(heave)为沿图中zb轴上下平动;横摇(roll)为绕图中xb轴转动;纵摇(pitch)为绕图中yb轴转动;艏摇(yaw)为绕图中zb轴转动;为了准确监控船舶航行中的姿态及位置,一般大型海船上安装有姿态仪(三轴加速度传感器和三轴陀螺仪),姿态仪的本质是陀螺仪、加速度计及其数据融合的计算,可以采集船舶上述六个自由度的数据,用以辅助航行。姿态仪属于精密仪器,成本昂贵,且需要有稳定的供电及稳定的运行环境。
2、内河船舶一般为小型船舶,不具备安装姿态仪的条件,但内河船舶在航行中同样有定姿定位及高精度导航的需求,尤其是内河船舶在天然河流渠化航道航行时,若偏离主航道会有搁浅的风险,更需要有一种成本低、精度高的定姿定位和导航装置。而目前,市面上还没有此类设备或系统。
3、之前,船舶普遍采用ais进行定位和导航,ais原理也是采用gps、北斗或双模获得卫星信号,进行定位和导航。近年来,海洋渔船已经普及采用北斗进行导航定位和船舶动态管理。在一些地方的内河货船上,也推广了北斗定位终端,用于船舶定位和监管。由于前几年,北斗定位终端成本较高,一般一艘船只安装一个北斗终端进行船舶的定位和导航。但由于是单终端的单点定位,只能实现米级的定位精度,无法实现船舶姿态的监测及精度更高的定位导航。而在一些天然河流渠化航道,及内河航道的桥区、船闸和船舶流量较大的航段,船舶越来越需要实时监测自身的航行姿态,或更高精度的定位。
4、综上,如何低成本的实现内河船舶姿态的实时监测和高精度定位成为目前亟需解决的技术问题。
技术实现思路
1、有鉴于此,本实用新型的目的在于提供一种内河船舶高精度定姿定位的系统,以缓解技术无法低成本的实现内河船舶姿态的实时监测和高精度定位的技术问题。
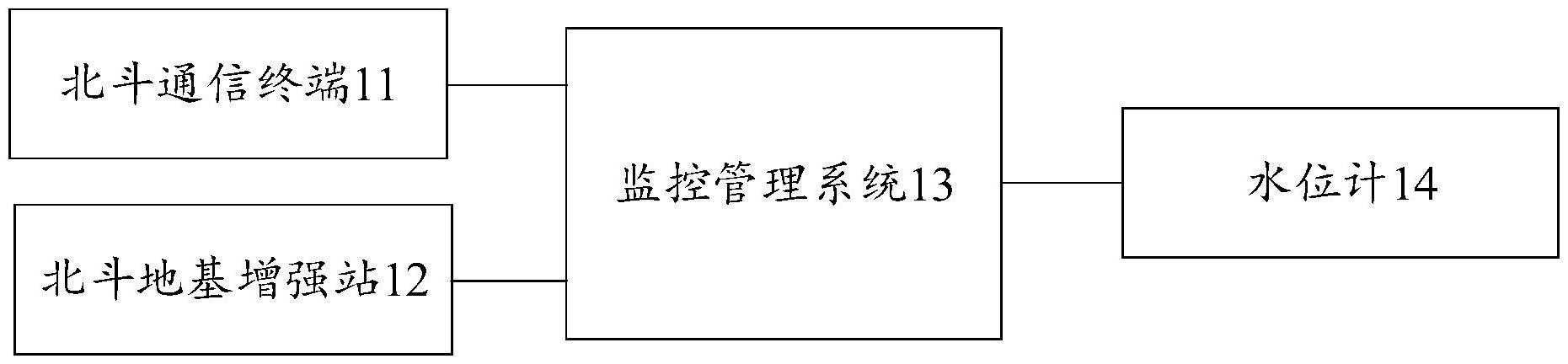
2、第一方面,本实用新型实施例提供了一种内河船舶高精度定姿定位的系统,包括:北斗通信终端、北斗地基增强站、监控管理系统和水位计;
3、所述北斗通信终端中的北斗定位终端的数量为多个,且所述北斗定位终端固定安装于内河船舶的目标位置,与所述监控管理系统通信连接,所述北斗通信终端,用于对所述内河船舶的当前位置进行定位,并将定位得到的三维空间定位数据发送至所述监控管理系统;
4、所述北斗地基增强站设置于航道沿线的岸上,用于实时播发综合定位误差,以使所述监控管理系统获取所述综合定位误差;
5、所述水位计设置于航道沿线的岸上,与所述监控管理系统通信连接,用于实时检测航道水位,并将所述航道水位发送至所述监控管理系统;
6、所述监控管理系统,用于根据所述三维空间定位数据、所述综合定位误差和所述航道水位进行所述内河船舶的当前位置和当前姿态的计算,得到所述内河船舶实时的目标定位数据和目标姿态数据,其中,所述目标定位数据包括:所述内河船舶的中心点坐标、干舷高度和船舶吃水,所述目标姿态数据包括:横荡、纵荡、垂荡,横摇、纵摇和艏摇。
7、进一步的,还包括:导航终端;
8、所述导航终端设置于所述内河船舶上,与所述监控管理系统通信连接,所述导航终端,用于显示导航图、实时的目标定位数据、实时的目标姿态数据、导航信息和航行安全报警提示信息。
9、进一步的,还包括:多普勒剖面仪;
10、所述多普勒剖面仪设置于航道沿线的岸上,与所述监控管理系统通信连接,所述多普勒剖面仪,用于实时测量断面流速和流量,通过所述监控管理系统向所述内河船舶提供航行区域的水文监测预警信息。
11、进一步的,所述北斗通信终端包括:多个所述北斗定位终端、串口服务器和通信模块;
12、每个所述北斗定位终端与所述串口服务器连接,所述串口服务器与所述通信模块连接,所述北斗定位终端,用于对所述内河船舶的当前位置进行定位,并将定位得到的所述三维空间定位数据经由所述串口服务器并通过所述通信模块发送至所述监控管理系统。
13、进一步的,所述北斗定位终端的数量为4个,所述目标位置包括:船艏、船艉、船体左舷中部和船体右舷中部,每个所述目标位置设置一个所述北斗定位终端,且4个所述北斗定位终端在竖向保持水平;
14、其中,所述北斗定位终端包括:接收机和北斗天线。
15、进一步的,所述北斗地基增强站包括:基准站、数据处理系统、数据播发系统、运营服务系统和用户终端。
16、进一步的,所述监控管理系统包括:服务器和客户端;
17、所述服务器,用于设置监控系统参数、接收设备数据、船舶姿态计算、船舶定位计算、船舶导航服务、告警判断和监控数据记录;
18、所述客户端,用于显示航道图、所有监控管理的内河船舶的实时的目标定位数据、实时的目标姿态数据和航行安全报警提示信息。
19、进一步的,所述监控管理系统,还用于接收所述多普勒剖面仪测量的断面流速和流量,并基于所述断面流速和所述流量确定航行区域的水文监测预警信息。
20、进一步的,所述导航终端包括:带有导航软件的终端设备。
21、进一步的,所述三维空间定位数据包括:船艏三维空间坐标、船艉三维空间坐标、船体左舷中部三维空间坐标和船体右舷中部三维空间坐标。
22、在本实用新型实施例中,提供了一种内河船舶高精度定姿定位的系统,包括:北斗通信终端、北斗地基增强站、监控管理系统和水位计;北斗通信终端中的北斗定位终端的数量为多个,且北斗定位终端固定安装于内河船舶的目标位置,与监控管理系统通信连接,北斗通信终端,用于对内河船舶的当前位置进行定位,并将定位得到的三维空间定位数据发送至监控管理系统;北斗地基增强站设置于航道沿线的岸上,用于实时播发综合定位误差,以使监控管理系统获取综合定位误差;水位计设置于航道沿线的岸上,与监控管理系统通信连接,用于实时检测航道水位,并将航道水位发送至监控管理系统;监控管理系统,用于根据三维空间定位数据、综合定位误差和航道水位进行内河船舶的当前位置和当前姿态的计算,得到内河船舶实时的目标定位数据和目标姿态数据,其中,目标定位数据包括:内河船舶的中心点坐标、干舷高度和船舶吃水,目标姿态数据包括:横荡、纵荡、垂荡,横摇、纵摇和艏摇。通过上述描述可知,本实用新型的内河船舶高精度定姿定位的系统通过在内河船舶上安装多个北斗定位终端,结合北斗地基增强站和水位计能够实现内河船舶的高精度定位和姿态的实时监测,且多个北斗定位终端的成本较低,即本实用新型的系统能够低成本的实现内河船舶的姿态的实时监测和高精度定位,缓解了现有技术无法低成本的实现内河船舶姿态的实时监测和高精度定位的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!