一种用于避免施工设备撞击公共设施的系统及方法与流程
本发明总体上涉及施工设备,并且特别地涉及用于施工设备的感测系统。
背景技术:
1、在建筑行业中,公共设施撞击(即,施工设备碰撞并且经常破坏地下公共设施服务)是频繁的,并且导致显著的直接和间接成本。当在建成区域(其可能具有燃气总管、地下电缆和/或光纤电缆等)中或建成区域之间进行挖掘时,这是特别常见的。对燃气总管和地下电缆的撞击对生命和财产有害。对光纤电缆的撞击的修复非常昂贵,并且经常导致在大量时间内的通信丢失,这可能对取决于通信的许多类型的服务产生后续影响。
2、不幸的是,用于检测地下公共设施的已知方法都不是有效的。声学方法无法检测公共设施。磁力计检测含铁的金属管道,但是这是不可靠的并且容易误解释。涉及注入电流以及随后检测电场和磁场的主动式方法取决于导电连续性,而该导电连续性不总是得到保证的。此外,这些方法要求操作经验,并且通常被认为是不可靠的。
3、带电电力电缆可以通过它们的磁场来检测,但是对于铠装电缆(armoured cable)而言则不然,因为铠装电缆的铠装(armour)屏蔽了磁场。
4、探地雷达(ground penetrating radar,gpr)是最普遍的检测方法,因为该方法检测材料不连续性,而不管材料的性质如何。即,该方法检测所有金属、所有塑料、陶瓷甚至空隙。对电缆的检测与其是否通电无关。gpr可以检测光纤电缆,并且尤其是用于城市到城市通信的高流量光纤电缆,其中断裂会导致最显著的成本。
5、然而,在常规使用中,gpr要求用于定位公共设施的现场前期勘测,并且涉及离线地图准备以及地图与放置在现场的参考标记的协调。由于雷达地图与现场参考之间的协调通常较差,并且由于gpr图像的解释要求相当大量的专业知识,因此常规应用的gpr在许多情况下是不切实际的。
6、john deere的gb2486375描述了一种天线,该天线要被放置在挖掘机器的铲斗的齿上,使得波束出口与铲斗的齿呈一直线。这样的波束方向对于在挖掘过程中检测公共设施是无效的。
技术实现思路
1、因此,根据本发明的优选实施例,提供了一种gpr(探地雷达)系统,包括:具有铲斗的挖掘机器;安装在铲斗上的gpr单元;以及安装在挖掘机器的舱室中的后处理单元。gpr单元包括:安装在铲斗的对地基座上和/或穿过铲斗的对地基座安装的至少一个gpr天线;以及安装在铲斗的上部内的数据处理器。数据处理器在土壤层的逐步移除期间检测危险的存在。当数据处理器在土壤层的逐步移除期间检测到危险时,后处理单元提供警报。
2、此外,根据本发明的优选实施例,数据处理器包括:雷达控制器,其用于以sfcw(步进频率连续波)方式和sficw(步进频率中断连续波)方式两者发送和接收脉冲。
3、此外,根据本发明的优选实施例,数据处理器包括音调校准器,其用于确定天线缺陷。由于脉冲是频域中的音调的序列,因此数据处理器包括脉冲校正器,其用于使用音调校准器的输出来单独地校正音调中的缺陷。
4、此外,根据本发明的优选实施例,音调校准器校正至少一个gpr天线中的振铃。
5、更进一步地,根据本发明的优选实施例,数据处理器包括:序列迁移单元,其从脉冲校正器接收经校正的脉冲,以将经校正的脉冲中的回波能量迁移到指示危险的位置的最大似然点。
6、此外,根据本发明的优选实施例,当铲斗正在挖地时,至少一个天线指向地面。
7、此外,根据本发明的优选实施例,至少一个天线被设计为能够经受严苛的挖掘环境。
8、更进一步地,根据本发明的优选实施例,至少一个gpr天线被安装在铲斗的体积内。
9、此外,根据本发明的优选实施例,数据处理器包括imu(惯性测量单元)和卡尔曼滤波器。卡尔曼滤波器使用铲斗的受约束运动来估计铲斗的水平位置。
10、此外,根据本发明的优选实施例,数据处理器包括:起始点确定器,其用于建立基准,公共设施散射体(scatterer)的水平坐标和垂直坐标是根据该基准来测量的。
11、此外,根据本发明的优选实施例,警报是显示警报和/或可听警报。
12、此外,根据本发明的优选实施例,后处理单元包括:gps单元,其用于对挖掘机器的现场进行地理定位。后处理单元将来自gps单元的位置数据包括在土壤层的移除的日志中。
13、此外,根据本发明的优选实施例,系统包括:通信单元,其用于将危险的位置和位置数据中继到外部代理。
14、更进一步地,根据本发明的优选实施例,系统包括:至少一个接口,其用于从仪器接收用于操作员辅助或自主操作的控制信息。
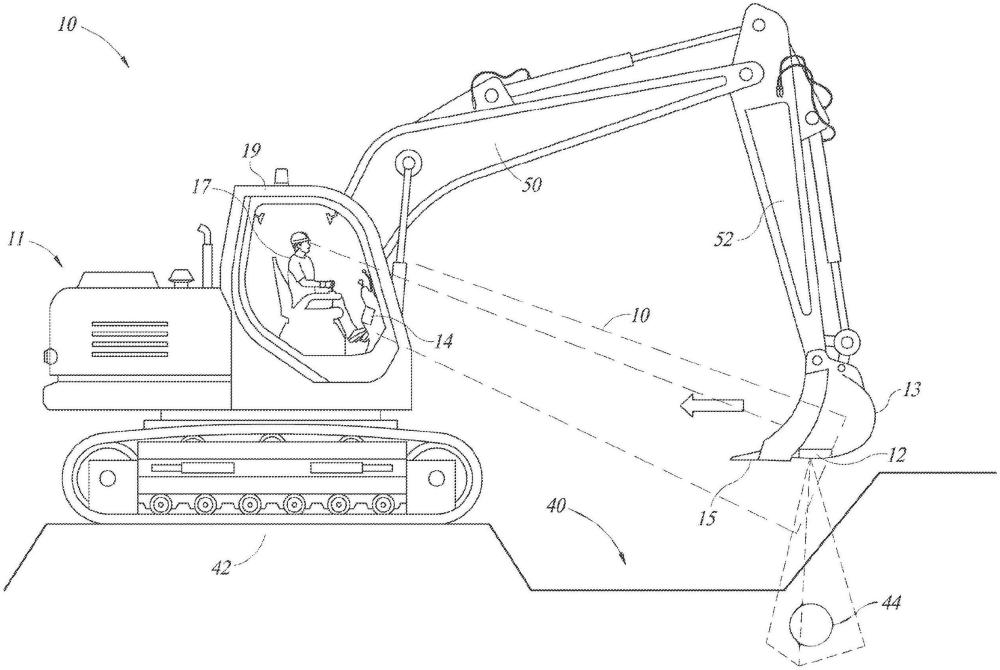
15、可替代地,根据本发明的替代优选实施例,系统还包括发射器和多个接收器。发射器被安装在挖掘机器的杆上,并且靠近杆与铲斗之间的枢轴。多个接收器被安装在舱室内以从发射器接收信号。数据处理器至少根据发射器与接收器之间的飞行时间测量来确定铲斗的水平位置。
16、此外,根据本发明的优选实施例,发射器和多个接收器实现以下技术中的一项:超声学、uwb雷达、毫米波雷达和光学。
17、更进一步地,根据本发明的优选实施例,系统包括:测斜仪,其用于测量铲斗相对于水平面的倾斜度(inclination)。数据处理器利用该倾斜度来确定水平位置。
18、根据本发明的优选实施例,还提供了一种用于gpr系统的方法。该方法包括:使用安装在挖掘机器的铲斗上的gpr单元,在土壤层的逐步移除期间检测危险的存在,其中,gpr单元包括:安装在铲斗的对地基座上和/或穿过铲斗的对地基座安装的至少一个gpr天线;以及安装在铲斗的上部内的数据处理器;以及当数据处理器在土壤层的逐步移除期间检测到危险时,提供警报。
19、此外,根据本发明的优选实施例,检测包括:以sfcw(步进频率连续波)方式和sficw方式两者发送和接收脉冲。
20、此外,根据本发明的优选实施例,脉冲是频域中的音调的序列,并且检测包括:确定天线缺陷,并且使用确定的输出来单独地校正音调中的缺陷。确定包括校正至少一个gpr天线中的振铃。
21、更进一步地,根据本发明的优选实施例,检测包括:接收经校正的脉冲,并且将经校正的脉冲中的回波能量迁移到指示危险的位置的最大似然点。
22、此外,根据本发明的优选实施例,方法包括:当铲斗正在挖地时,使至少一个天线指向地面。
23、此外,根据本发明的优选实施例,方法包括:将至少一个gpr天线安装在铲斗的体积内。
24、此外,根据本发明的优选实施例,检测包括:利用卡尔曼滤波器,使用铲斗的受约束运动以及imu(惯性测量单元)的输出来估计铲斗的水平位置。
25、此外,根据本发明的优选实施例,检测包括:建立基准,公共设施散射体的水平坐标和垂直坐标是根据该基准来测量的。
26、更进一步地,根据本发明的优选实施例,方法包括:对挖掘机器的现场进行地理定位,并且将来自地理定位的位置数据包括在土壤层的移除的日志中。
27、此外,根据本发明的优选实施例,方法包括:将危险的位置和位置数据中继到外部代理。
28、此外,根据本发明的优选实施例,方法包括:从仪器接收用于操作员辅助或自主操作的控制信息。
29、可替代地,根据本发明的替代优选实施例,检测包括:至少根据发射器与多个接收器之间的飞行时间测量来确定铲斗的水平位置,其中,该发射器被安装在挖掘机器的杆上并且靠近杆与铲斗之间的枢轴,该多个接收器被安装在舱室内并且从发射器接收信号。
30、最后,根据本发明的优选实施例,方法包括:测量铲斗相对于水平面的倾斜度,检测用于利用该倾斜度来确定水平位置。
- 还没有人留言评论。精彩留言会获得点赞!