一种用于空心涡轮叶片壁厚超声测量的自动信号采集方法与流程
本发明涉及超声自动测量,尤其涉及一种用于空心涡轮叶片壁厚超声测量的自动信号采集方法。
背景技术:
1、空心涡轮叶片是航空发动机的核心部件之一,由于工作条件恶劣,航空发动机涡轮叶片大都采用了薄壁空心结构,而壁厚是空心涡轮叶片的重要几何指标。目前对空心涡轮叶片壁厚的测量主要采用超声和ct方法。ct法测量精度高,但测量效率较低,因此,目前空心涡轮叶片壁厚测量主要采用超声法。
2、超声壁厚测量技术基于超声脉冲回波原理,通过测量超声波从工件上表面传播至底面所需的时间,再根据工件声速值,计算出工件壁厚。
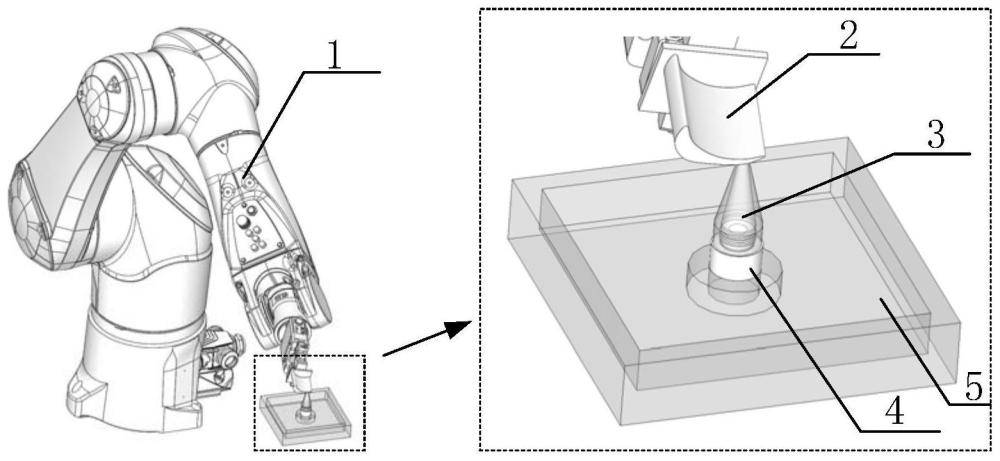
3、为了代替传统人工测量,目前现有技术提出了基于机器人的空心涡轮叶片壁厚超声波自动测量装置,该装置可自动完成壁厚测量及结果判定,显著提高了测量效率(发明专利《一种基于机器人的涡轮叶片壁厚超声波自动化测量装置》202211299668.1、周波论文《an ultrasonic testing method for wall thickness of turbine blades》)。
4、然而,当空心涡轮叶片为毛坯阶段时,叶片榫头精度无法保证,因此,在控制机器人夹持叶片榫头时就会存在位置误差,很难保证叶片上各测厚点的实际位置与理论位置完成一致。另外,由于空心涡轮叶片外廓尺寸较小,叶身扭角大,叶片上各测厚点的外表面及内腔均为曲面,则超声波在叶片中传输时就会出现声束发散现象,严重时会导致没有超声回波信号产生(董德秀论文《高压涡轮叶片超声测厚的工艺方法》无损检测)。因此,在实际人工检测时,探头声束轴线并非垂直于叶片外表面或者下表面,而是需要不断调整探头声束的入射角度,以获得最佳的超声回波信号。针对上述问题,在采用基于机器人的超声波自动测量装置进行空心涡轮叶片壁厚测量时,也需要自动调整探头声束入射角度,以实现对叶片壁厚的快速自动超声测量。
技术实现思路
1、本发明提供了一种用于空心涡轮叶片壁厚超声测量的自动信号采集方法,所述自动信号采集方法包括以下步骤:
2、s1.对标准试块的信噪比和声速进行校准;
3、s2.机器人夹爪夹紧空心涡轮叶片的榫头部分,移动空心涡轮叶片至探头喷嘴上方,使探头喷嘴对准空心涡轮叶片上的一个测厚点,并设置闸门超声参数;
4、s3.自适应调整超声探伤仪的增益值,超声探伤仪采集超声回波信号,取出厚度值,判别厚度测量结果是否有效;
5、s4.机器人夹持空心涡轮叶片,沿空心涡轮叶片测厚点k1所在横截面的周向方向左右移动,并保持探头喷嘴始终与空心涡轮叶片的外表面接触,同时,超声探伤仪实时采集一组超声回波信号,取出最小厚度值,判别厚度测量结果是否有效;
6、s5.机器人夹持空心涡轮叶片移动,使超声探头的声束轴线与空心涡轮叶片测厚点k1的法线保持固定偏转角度,并围绕空心涡轮叶片测厚点k1旋转一周,同时,超声探伤仪实时采集一组超声回波信号,取出最小厚度值,判别厚度测量结果是否有效;
7、依次循环执行s2-s5,实现对空心涡轮叶片上每个测厚点ki(i=1,2,3…)的测量。
8、在一些实施方式中,所述标准试块的厚度h与空心涡轮叶片叶身的最大壁厚相同,所述标准试块的材料与空心涡轮叶片叶身的材料相同。
9、在一些实施方式中,所述s1具体包括:
10、s101.对标准试块进行超声自动测量,超声探伤仪采集一个超声回波信号,通过自适应调整超声探伤仪的增益值,使标准试块的一次底面回波波高为满量程的80%;
11、s102.设置闸门a位于采集的超声回波信号中的界面波和一次底面回波之间,记录闸门a的噪声水平e%;
12、s103.根据标准试块的厚度h和测量的一次底面回波时间t,计算标准试块的声速值v=2h/t。
13、在一些实施方式中,所述s2具体包括:
14、s201.机器人夹持空心涡轮叶片运动,将空心涡轮叶片测厚点k1对准探头喷嘴,保持探头喷嘴与空心涡轮叶片测厚点k1的外表面接触,并保持超声探头的声束轴线垂直于该空心涡轮叶片测厚点k1的外表面;
15、s202.设置闸门a为跟随界面波模式,并位于界面波和一次底面回波之间,闸门a起始值设为0.3mm、终止值设为空心涡轮叶片测厚点k1的合格上限值;
16、s203.设置闸门b为跟随界面波模式,并框住一次底面回波,闸门b的起始值设为空心涡轮叶片测厚点k1的合格上限值,闸门b的终止点设为空心涡轮叶片测厚点k1的合格下限值。
17、在一些实施方式中,所述s3具体包括:超声探伤仪采集超声回波信号,通过自适应调整超声探伤仪的增益值,将闸门b中的最大波高调整为满量程的80%,同时记录当前闸门a的最大波高值l%。
18、在一些实施方式中,如果l%小于噪声水平e%,记录当前闸门b中最大波高的时间值t1,再根据声速值v,计算获得当前空心涡轮叶片测厚点k1的厚度值h1=v*t1/2,该空心涡轮叶片测厚点k1测量结束,下一步继续执行s2,启动下一个空心涡轮叶片测厚点的测量过程;如果l%大于等于噪声水平e%,此时该空心涡轮叶片测厚点k1测量失败,继续执行s4。
19、在一些实施方式中,所述s4具体包括:
20、s401.机器人夹持空心涡轮叶片,在空心涡轮叶片测厚点k1所在横截面的周向方向上左右各移动δlmm,此时,超声波探伤仪设为固定脉冲重复频率,采用内时钟的方式实时采集一组超声回波信号mj(j=1,2,3,……,p),p表示实时采集的超声回波信号的个数;
21、s402.对第mj(j=1,2,3,……,p)号超声回波信号进行增益自适应调整,将闸门b中的最大波高调整为满增益的80%,同时记录当前闸门a的最大波高lj%(j=1,2,3,……,p),如果lj%小于噪声水平e%,记录当前闸门b中最大波高的时间值tj,再根据声速值v,计算获得厚度值hj=v*tj/2,如果lj%大于等于噪声水平e%,则设置厚度值hj=无穷大。
22、在一些实施方式中,依次对mj(j=1,2,3,……,p)的各个超声回波信号执行判断,获得一组厚度值hj(j=1,2,3,……,p),并取其中的最小值hmin,如果hmin存在有效值,则空心涡轮叶片测厚点k1的测量结束,将当前空心涡轮叶片测厚点k1的厚度值h1设置为该最小值hmin;如果hmin均为无穷大,则不存在有效值,则继续执行s5。
23、在一些实施方式中,所述s5具体包括:
24、s501.机器人夹持并移动空心涡轮叶片,使空心涡轮叶片测厚点k1位置对准探头喷嘴,机器人调整空心涡轮叶片角度姿态,使超声探头的声束轴线与该空心涡轮叶片测厚点k1的法线形成偏转角度θv(v=1,2,3,…,d),并围绕空心涡轮叶片测厚点k1旋转一周360°,d表示机器人调整空心涡轮叶片角度姿态的次数;
25、s502.超声探伤仪设为固定脉冲重复频率,采用内时钟的方式实时采集一组超声回波信号mk(k=1,2,3,……,q),q表示实时采集的超声回波信号的个数;
26、s503.对第mk(k=1,2,3,……,q)个超声回波信号进行增益自适应调整,使闸门b中的最大波高调整为满量程的80%,同时记录当前闸门a的最大波高lk%(k=1,2,3,……,q)。
27、在一些实施方式中,所述如果lk%小于噪声水平e%,记录当前闸门b中最大波高的时间值tk,再根据声速值v,计算获得厚度值hk=v*tk/2;如果lk%大于等于噪声水平e%,则设置厚度值hk=无穷大;依次对mk(k=1,2,3,……,q)的各个超声回波信号执行上述判断,获得一组厚度值hk(k=1,2,3,……,q),并取最小值hmin;如果hmin存在有效值,则该空心涡轮叶片测厚点k1测量结束,将当前空心涡轮叶片测厚点k1的厚度值h1设置为该最小值hmin;如果hmin均为无穷大,不存在有效值,则设置v加1,如果v+1后大于d,则流程结束,该叶片测厚点测量失败;如果v+1小于等于d,则继续执行s5。
28、与现有技术相比,本发明具有以下有益效果:
29、采用基于机器人的空心涡轮叶片超声自动测量装置,通过移动叶片自动调整超声探头声束轴线的位置和角度,实现对叶片壁厚的快速自动超声测量,解决了难以通过一次超声测量便获得准确壁厚值的问题。
- 还没有人留言评论。精彩留言会获得点赞!