一种基于跟随式北斗RNSS的自适应路线修正方法及系统与流程
本发明涉及路线修正,具体涉及一种基于跟随式北斗rnss的自适应路线修正方法及系统。
背景技术:
1、
2、在日常工作和生活中,人们经常会遇到希望能够依靠地图导航进行找人、追车等跟随、跟踪、追踪情况的发生。由于跟随的目标经常会处于移动当中,传统意义上的地图导航方式已经不能满足此类应用,需要一种能够随着目标移动而不断修正导航目的地、导航路线的方法和系统。
3、现有的基于卫星定位的跟随方案,跟随者需要不断刷新位置,不断的设置目的,频繁重新规划路径来保持对移动目标的跟随,客户端频繁刷新也增加了系统的负担,容易造成导航中断,需要在导航过程中制定合理的更新目标实际位置的方案。
技术实现思路
1、本发明的目的在于提供一种基于跟随式北斗rnss的自适应路线修正方法及系统,解决以下技术问题:
2、现有的基于卫星定位的跟随方案,跟随者需要不断刷新位置,不断的设置目的,频繁重新规划路径来保持对移动目标的跟随,客户端频繁刷新也增加了系统的负担,容易造成导航中断。
3、本发明的目的可以通过以下技术方案实现:
4、一种基于跟随式北斗rnss的自适应路线修正方法及系统,包括以下步骤:
5、获取目标方和跟随方的实时位置信息,并发送目标方实时位置信息至跟随方的移动终端;
6、通过移动终端计算目标方当前地理位置坐标与导航目的地基准位置的目标位移距离;其中,导航目的地基准位置为目标方的初始位置;
7、通过移动终端计算跟随方当前地理位置坐标与导航目的地基准位置的导航线路剩余距离;
8、移动终端根据计算得到的目标位移距离与导航线路剩余距离,计算更新导航目的地基准位置的必要性评估值;
9、根据必要性评估值确定是否需要更新导航目的地基准位置,若需要更新导航目的地基准位置,根据目标方实时位置信息更新设定导航目的地基准位置,并重新规划跟随方的导航路线,否则,不更新导航目的地基准位置。
10、作为本发明进一步的方案:获取目标方和跟随方的实时位置信息,包括以下步骤:
11、建立目标方a与跟随方b的关联,目标方a通过服务平台与跟随方b进行数据交互;
12、启动目标方和跟随方的路线规划导航;
13、确定导航目的地基准位置、初始出发地点和实时位置坐标;
14、其中,导航目的地基准位置为跟随方b的目的地。
15、作为本发明进一步的方案:启动目标方和跟随方的路线规划导航,包括:
16、目标方a通过服务平台,上报实时地理位置坐标;
17、随方b通过服务平台,获取目标方a的实时地理位置坐标。
18、作为本发明进一步的方案:确定导航目的地基准位置、初始出发地点和实时位置坐标,包括以下步骤:
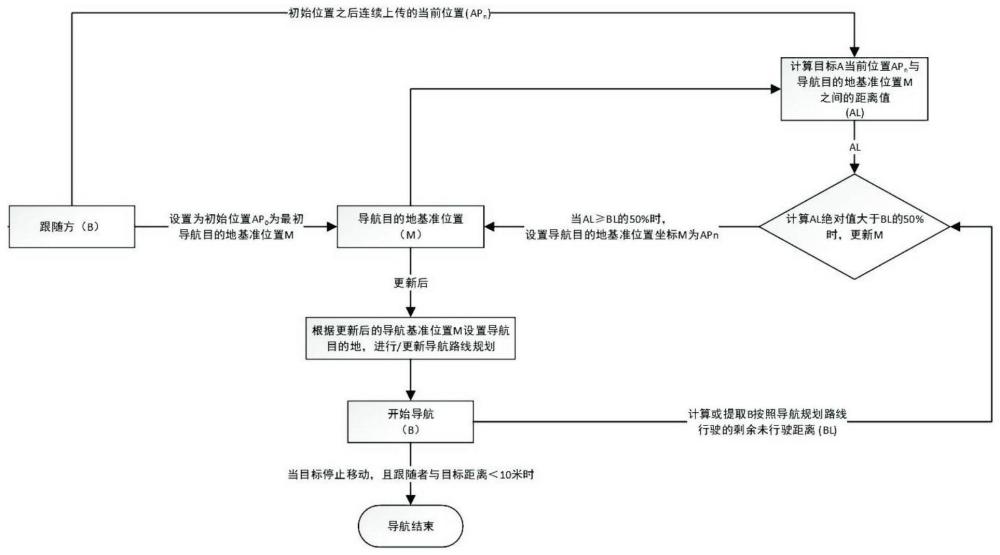
19、获取目标方a的初始地理位置坐标ap0和跟随方b的初始地理位置坐标bp0;
20、将目标方a的初始地理位置坐标ap0设为导航目的地基准位置m,跟随方b的初始位置信息bp0作为初始出发地点进行规划导航路线;
21、实时获取目标方a当前地理位置坐标apn和跟随方b当前地理位置坐标bpn。
22、作为本发明进一步的方案:计算目标方当前地理位置坐标与导航目的地基准位置的目标位移距离,包括以下步骤:
23、根据目标方的实时位置信息,计算目标方a当前地理位置坐标apn与导航目的地基准位置m之间的位移距离作为目标位移距离al。
24、作为本发明进一步的方案:计算跟随方当前地理位置坐标与导航目的地基准位置的导航线路剩余距离,包括以下步骤:
25、根据跟随方的实时位置信息,计算跟随方b当前地理位置坐标bpn与导航目的地基准位置m的导航线路剩余距离bl。
26、作为本发明进一步的方案:根据计算得到的目标位移距离与导航线路剩余距离,计算更新导航目的地基准位置的必要性评估值,包括以下步骤:
27、根据目标方a当前地理位置坐标apn距导航目的地基准位置m的位移距离al绝对值与所述跟随方b当前地理位置坐标bpn与导航目的地基准位置m的导航线路剩余距离bl的绝对值,计算更新导航目的地基准位置的必要性评估值,通过以下公式计算:
28、v=|al|-|bl|*x
29、其中,v为更新导航目的地基准位置的必要性评估值,x为导航线路剩余距离加权预设值,x∈[0,1]。
30、作为本发明进一步的方案:根据必要性评估值确定是否需要更新导航目的地基准位置,若需要更新导航目的地基准位置,根据目标方实时位置信息更新设定导航目的地基准位置,并重新规划跟随方的导航路线,否则,不更新导航目的地基准位置,包括以下步骤:
31、若更新导航目的地基准位置的必要性评估值v>0,则需要更新导航目的地基准位置,否则不需要更新导航目的地基准位置;
32、若需要更新导航目的地基准位置,将目标方a的当前地理位置坐标apn更新设定为新的导航目的地基准位置m作为跟随方b的新目的地,并重新规划跟随方b的导航路线;
33、重复上述过程,直到跟随方b的当前地理位置坐标bpn与目标方a的当前地理位置坐标apn的距离小于10米时停止跟随导航。
34、一种基于跟随式北斗rnss的自适应路线修正系统,包括:
35、地图数据模块:用于存储地图数据和地点信息,能够提供导航所需的基础地图信息;
36、定位模块:用于通过卫星定位技术,实时获取车辆的位置信息;
37、数据处理单元:负责将定位模块的信息进行处理,包括:协议转换、信息加密、功能设置和参数调整;
38、数据传输单元:用于将数据处理单元处理后的定位数据传输至北斗位置服务平台;
39、北斗位置服务平台:用于上报目标方的实时地理位置坐标,并为跟随方提供目标方的实时地理位置坐标;
40、移动终端:用于提供执行如上的一种基于跟随式北斗rnss的自适应路线修正方法,对目标方进行追踪。
41、本发明的有益效果:
42、本发明通过目标方当前地理位置坐标与导航目的地基准位置的目标位移距离,获取目标方的移动数据和位置信息。通过跟随方当前地理位置坐标与导航目的地基准位置的导航线路剩余距离可实时了解跟随方的跟随状态。根据目标位移距离与导航线路剩余距离,计算更新导航目的地基准位置的必要性评估值,可根据跟随方的跟随状态和目标方的实时移动数据,及时调整追踪策略,使得跟随方更易追踪到目标方。
43、本发明通过以目标为导向的导航方法,在导航过程中根据合理方案自动更新目标实际位置,并根据目标最新位置计算并修正规划地图导航路径,实现人、车、船等始终能够沿导航路线向目标导航,其中,目标可以是车辆、人员、动物、货物等安装了定位装置的一切形态;能够随着目标移动,在跟随过程中根据合理方案修正导航目的地和导航路线,实现对前方目标的跟随、跟踪、追踪。方便设置团队集合点,多成员任务,组队出行,公安侦查等应用以及人工智能设备应用,同时减轻了频繁更换导航目的地给系统带来的运算负担。
- 还没有人留言评论。精彩留言会获得点赞!