多维智能驾驶路径规划系统
本发明涉及车辆控制系统,尤其涉及多维智能驾驶路径规划系统。
背景技术:
1、车辆控制系统技术领域是智能驾驶的核心组成部分,涉及环境感知、决策规划和车辆控制。这一领域的发展目标是使车辆能够更加智能地与环境互动,实现更高效、安全的驾驶。技术的关键点在于模仿人类驾驶员的感知能力,处理和解析复杂的路况信息。当前的挑战包括在各种天气和道路条件下获取准确的信息,以及降低系统的造价。
2、多维智能驾驶路径规划系统旨在为智能车辆提供的驾驶路径。通过分析大量数据,如路况、交通信号和车辆状态,来优化行车路线。目的是提高安全性、降低能耗,同时改善交通流动和提升驾驶体验。这种系统对于减少交通事故和缓解交通拥堵具有重要作用。系统通常需要集成先进的传感技术、车辆到一切(v2x)通信系统、人工智能算法,以及状态感知和定位系统。这些组件共同工作,实时收集和分析道路和交通情况,提供精确的导航和控制指令。随着技术的进步,精确定位和环境感知能力将是解决现有挑战的关键。
3、传统的驾驶路径规划系统在多方面存在不足。这些系统通常依赖于有限的数据源和相对简单的算法,缺乏实时性和准确性,导致路径规划效率低下,无法适应快速变化的交通状况。缺乏高级信号处理和机器学习技术的应用,使得传统系统在处理大量复杂数据时效率不高,无法提供最优化的导航方案。此外,传统系统在交通流量预测和协同驾驶方面的能力有限,不能有效减缓交通拥堵或提升车辆行驶的安全性。定位和地图信息的不精确融合也常导致导航错误,而缺乏智能化的交通信号同步和未来交通状况的预测功能,则限制了整个交通系统的效率和安全性。因此,传统系统在应对当今日益复杂的交通需求方面面临着明显的局限性。
技术实现思路
1、本发明的目的是解决现有技术中存在的缺点,而提出的多维智能驾驶路径规划系统。
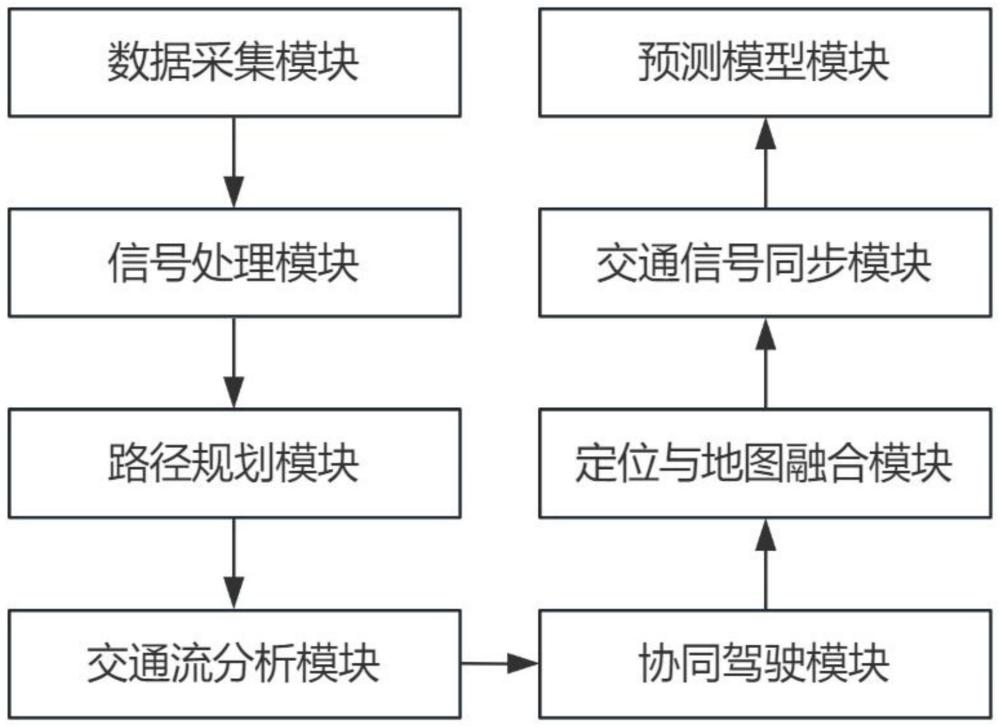
2、为了实现上述目的,本发明采用了如下技术方案:多维智能驾驶路径规划系统包括数据采集模块、信号处理模块、路径规划模块、交通流分析模块、协同驾驶模块、定位与地图融合模块、交通信号同步模块、预测模型模块;
3、所述数据采集模块基于v2x通信技术,采用数据捕获算法,收集车辆和环境数据,并进行数据整合,生成实时交通数据集;
4、所述信号处理模块基于实时交通数据集,采用信号处理算法,进行数据分析和优化处理,生成优化数据;
5、所述路径规划模块基于优化数据,采用基于机器学习的路径规划算法,进行路径计算,并进行动态调整,生成最优路径规划;
6、所述交通流分析模块基于最优路径规划,采用交通流量分析算法,对多路段流量进行预测,生成交通流预测;
7、所述协同驾驶模块基于交通流预测,采用协同驾驶算法,进行车辆与环境的协同配合,生成协同驾驶策略;
8、所述定位与地图融合模块基于uwb定位技术和协同驾驶策略,采用地图融合算法,将定位数据与地图结合,生成融合导航数据;
9、所述交通信号同步模块基于融合导航数据和物联网技术,采用同步算法,协调交通信号灯与车辆路径,生成同步交通指令;
10、所述预测模型模块基于同步交通指令和历史数据,采用深度学习和神经网络算法,对未来时间段内交通状况进行模拟和预测,生成交通流动预测。
11、作为本发明的进一步方案,所述实时交通数据集包括车辆位置、速度、环境条件信息,所述优化数据具体为经过滤波和降噪处理后的交通和环境信息,所述最优路径规划包括避开拥堵区域和最短路径选择,所述交通流预测具体为对未来时间段内多路段的交通流量预测,所述协同驾驶策略具体指车辆与交通信号、其他车辆的互动策略,所述融合导航数据具体为结合实时定位和地图数据的导航信息,所述同步交通指令具体指调整交通信号灯时序与车辆行驶路线的同步方案,所述交通流动预测具体为基于历史和实时数据的未来时间段内交通流量和趋势分析。
12、作为本发明的进一步方案,所述数据采集模块包括车载传感器子模块、交通信号子模块、道路条件子模块;
13、所述车载传感器子模块基于v2x通信技术,采用传感器融合算法,进行车辆环境数据收集,并进行数据初步整合,生成车辆环境初级数据集;
14、所述交通信号子模块基于车辆环境初级数据集,采用深度学习交通分析算法,进行交通信号数据分析,并通过数据重组,生成交通流量数据集;
15、所述道路条件子模块基于交通流量数据集,采用地理信息系统分析技术,进行道路条件分析,并进行数据融合,生成综合交通数据集;
16、所述传感器融合算法包括卡尔曼滤波和传感器同步校准技术,所述深度学习交通分析算法具体为卷积神经网络和循环神经网络的结合,所述地理信息系统分析技术包括空间数据分析和地理编码,用于评估道路状况和交通影响。
17、作为本发明的进一步方案,所述信号处理模块包括数据过滤子模块、信号优化子模块、数据融合子模块;
18、所述数据过滤子模块基于综合交通数据集,采用统计数据清洗技术,进行数据优化处理,并进行噪声去除,生成净化后的交通数据;
19、所述信号优化子模块基于净化后的交通数据,采用时间序列分析技术,进行数据重构,并通过信号增强,生成优化后的交通数据;
20、所述数据融合子模块基于优化后的交通数据,采用多维数据整合技术,进行多数据源整合,并进行深度数据融合,生成综合优化数据集;
21、所述统计数据清洗技术包括iqr方法和z得分过滤,用于有效去除异常值和噪声,所述时间序列分析技术具体为自回归移动平均模型和季节性分解,用于提升数据的时序性和趋势预测能力,所述多维数据整合技术包括主成分分析和集成学习方法。
22、作为本发明的进一步方案,所述路径规划模块包括路线计算子模块、路线优化子模块、导航子模块;
23、所述路线计算子模块基于优化数据,采用路径生成算法,进行路线计算,生成初步路径规划;
24、所述路线优化子模块基于初步路径规划,采用路径调整算法,进行路线优化,生成优化路径规划;
25、所述导航子模块基于优化路径规划,采用导航生成算法,进行终端路径导航,生成最优路径规划;
26、所述路径生成算法包括dijkstra算法和a*搜索算法,所述路径调整算法包括局部搜索算法和动态重规划技术,所述导航生成算法包括实时反馈调节技术和路径重计算机制。
27、作为本发明的进一步方案,所述交通流分析模块包括流量监测子模块、第一趋势分析子模块、流量预测子模块;
28、所述流量监测子模块基于最优路径规划,采用流量检测算法,进行实时流量监测,生成实时流量数据;
29、所述第一趋势分析子模块基于实时流量数据,采用趋势分析算法,生成流量趋势分析;
30、所述流量预测子模块基于流量趋势分析,采用预测模型算法,进行交通流预测,生成交通流预测;
31、所述流量检测算法具体为传感器网络分析和车流量模式识别技术,用于实时监控交通流量,所述趋势分析算法包括移动平均法和指数平滑法,所述预测模型算法包括长短期记忆网络和季节性arima模型。
32、作为本发明的进一步方案,所述协同驾驶模块包括车辆通信子模块、环境感知子模块、策略制定子模块;
33、所述车辆通信子模块基于交通流预测,采用增强型车辆间通信技术,进行数据交换,生成车辆协同数据;
34、所述环境感知子模块基于车辆协同数据,采用混合感知技术,进行环境分析,生成综合环境数据;
35、所述策略制定子模块基于综合环境数据,采用自适应决策制定技术,制定驾驶策略,生成最终驾驶策略;
36、所述增强型车辆间通信技术包括dsrc短程通信和lte-v2x车联网lte技术,所述混合感知技术具体为融合雷达与摄像头的数据解析和3d点云生成技术,所述自适应决策制定技术包括多场景决策树和实时反应调整算法。
37、作为本发明的进一步方案,所述定位与地图融合模块包括uwb定位子模块、地图更新子模块、导航融合子模块;
38、所述uwb定位子模块基于最终驾驶策略,采用车辆定位技术,进行车辆定位,生成定位精度数据;
39、所述地图更新子模块基于定位精度数据,采用动态地图更新方法,更新地图信息,生成最新地图信息;
40、所述导航融合子模块基于最新地图信息,采用地图导航融合策略,整合定位与地图数据,生成综合导航信息;
41、所述车辆定位技术包括超宽带信号处理和多路径效应消除算法,所述动态地图更新方法包括在线地图构建技术和增量式地图数据更新,用于验证地图信息的实时更新和准确性,所述地图导航融合策略包括路径优化算法和数据集成方法。
42、作为本发明的进一步方案,所述交通信号同步模块包括信号控制子模块、路径调整子模块、实时反馈子模块;
43、所述信号控制子模块基于融合导航数据和物联网技术,采用自适应交通控制技术,调整信号灯,生成信号调整指令;
44、所述路径调整子模块基于信号调整指令,采用动态路线规划技术,优化车辆路径,生成路径调整指令;
45、所述实时反馈子模块基于路径调整指令,采用交通状况实时反馈机制,提供交通更新,生成同步交通指令;
46、所述自适应交通控制技术具体为实时流量响应算法和优化交叉口调度策略,所述动态路线规划技术包括实时交通数据分析和预测算法引导的路线选择,所述交通状况实时反馈机制包括车流监测系统和数据反馈算法。
47、作为本发明的进一步方案,所述预测模型模块包括数据建模子模块、第二趋势分析子模块、预测输出子模块;
48、所述数据建模子模块基于同步交通指令和历史数据,采用交通数据建模方法,构建数据模型,生成交通数据模型;
49、所述第二趋势分析子模块基于交通数据模型,采用趋势分析技术,分析未来交通流,生成趋势分析结果;
50、所述预测输出子模块基于趋势分析结果,采用深度学习交通预测模型,生成交通流动预测;
51、所述交通数据建模方法包括历史趋势分析和流量模式识别,用于构建基于历史和实时数据的交通模型,所述趋势分析技术包括时间序列预测方法和季节性调整算法,所述深度学习交通预测模型包括卷积神经网络和长短期记忆网络。
52、与现有技术相比,本发明的优点和积极效果在于:
53、本发明中,通过整合v2x通信技术和数据捕获算法,系统能够实时收集和整合车辆与环境数据,提供更全面、更精确的交通信息。借助先进的信号处理和机器学习算法,有效地分析和优化这些数据,生成最优化的路径规划,显著提高了路线规划的效率和准确性。通过交通流量分析和协同驾驶策略,系统不仅能预测各路段流量,还能实现车辆与环境的高效协同,进一步优化交通流动和减少拥堵。定位与地图融合模块的结合使得导航数据更加精确,而交通信号同步和预测模型的应用则使得整个交通系统更加智能化,能够预测未来交通状况并据此调整交通信号,从而实现更流畅、更安全的道路使用体验。
- 还没有人留言评论。精彩留言会获得点赞!