一种顶管机定位定向系统的制作方法
本技术涉及导航,尤其涉及一种顶管机定位定向系统。
背景技术:
1、随着顶管机技术以及施工工艺的成熟,相较于全断面隧道掘进机,顶管机有着适应性更强、施工速度更快、对周围环境影响更小、适用范围更广、维修和更换更方便的特点。顶管机施工过程中,获取主机当前高精度的位置与姿态是保证顶管机沿设计路线高效安全施工的重要内容。
2、现有技术中,应用于顶管机导向的方法为人工法、光学测量方法以及惯性测量方法。
3、然而,人工法自动化程度较低,影响施工效率和质量,且无法适用于小直径顶管工程;光学测量方法中采用发射出的激光束打在安装在顶管机盾体内部的刻度板上,在刻度板上显示光斑,根据光斑的偏移距离判断顶管机掘进轨迹的方案只适用于直线顶管工程,且作用距离较短,无法满足长距离顶管机导向需求,而采用全站仪测量顶管机盾体内部安装的激光靶或者多个棱镜坐标,计算出盾体前后端中心坐标与设计轴线之间的偏差值的方案一般适用于直径较大的顶管机和大转弯半径的工程中,无法满足长距离、小直径以及小转弯的顶管机工程的需求;惯性测量方法的惯性器件存在精度随时间不断变差的特点,需要间隔一段时间进行修正,或者采用组合导航方案提高惯导系统精度,但常规组合方案无法在顶管机上使用,且小直径顶管机无法满足复测要求。
技术实现思路
1、本技术提供一种顶管机定位定向系统,用以解决现有技术中人工法自动化程度较低,影响施工效率和质量,且无法适用于小直径顶管工程;光学测量方法激光测量方案只适用于直线顶管工程,且作用距离较短,无法满足长距离顶管机导向需求,全站仪测量方案无法满足长距离、小直径以及小转弯的顶管机工程的需求;惯性测量方法常规惯性器件组合方案无法在顶管机上使用,且小直径顶管机无法满足复测要求的技术问题。
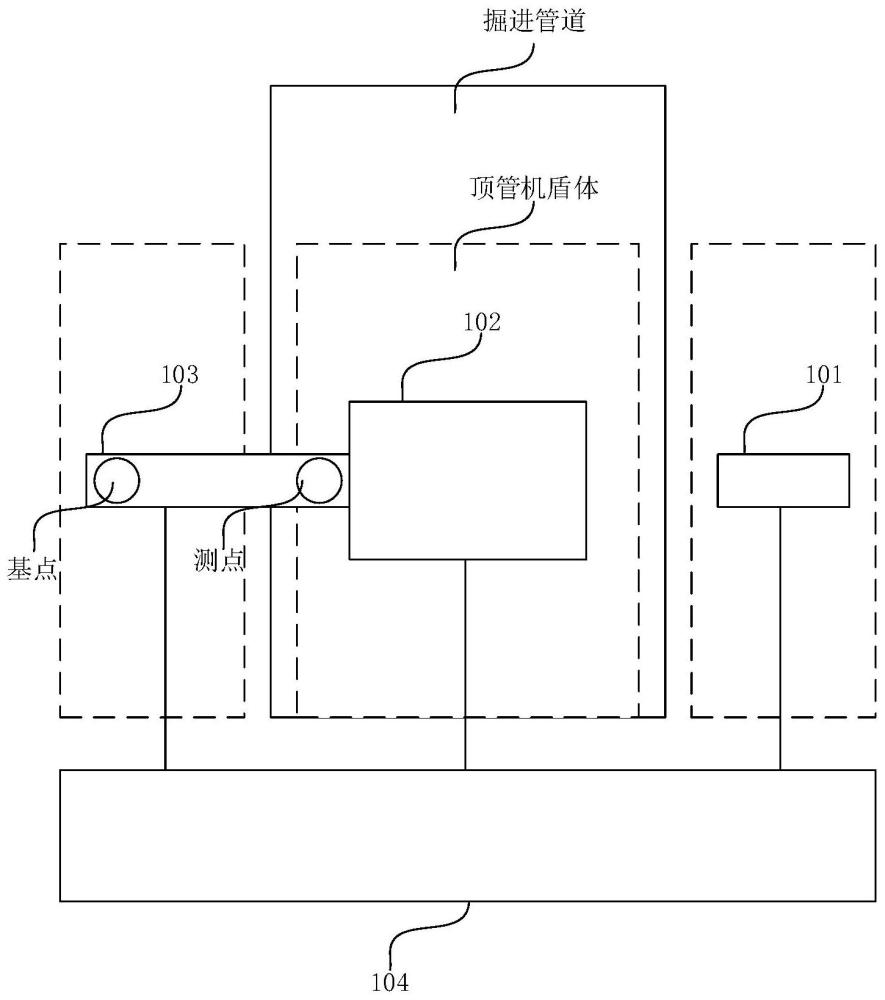
2、本技术提供一种顶管机定位定向系统,所述系统包括:
3、里程计,所述里程计用于测量所述顶管机在掘进管道内的里程增量;
4、设于所述顶管机盾体内部的捷联惯组设备;
5、液体静力高程测量装置,所述液体静力高程测量装置用于根据所述掘进管道外的基点的高程,测量所述顶管机上的测点与所述基点之间的高程差;
6、控制模块,用于:
7、控制所述捷联惯组设备测量所述顶管机的姿态角,所述姿态角包括所述顶管机的方位角、俯仰角和滚动角;
8、控制所述液体静力高程测量装置测量所述高程差;
9、根据所述里程增量数据、所述姿态角数据,计算所述顶管机以地理坐标系为导航坐标系的当前时刻坐标。
10、上述一种顶管机定位定向系统优选技术方案中,所述系统还包括里程轮,所述里程轮的测量轮与所述顶管机管道顶部接触,以使所述测量轮随所述顶管机管道推进而转动,所述里程计用于:
11、根据所述测量轮的转数测量所述里程增量。
12、上述一种顶管机定位定向系统优选技术方案中,所述测量轮每旋转一周,所述里程计输出脉冲数增加m,所述控制模块还用于:根据里程增量计算公式计算所述里程增量,所述里程增量计算公式为:
13、
14、其中,ld为所述里程增量,d为所述测量轮直径,m为所述里程计输出脉冲总数。
15、上述一种顶管机定位定向系统优选技术方案中,所述控制模块具体用于:
16、控制所述捷联惯组设备坐标系的坐标轴与所述里程计测量坐标系的同名坐标轴对准;
17、控制所述捷联惯组设备测量所述姿态角。
18、上述一种顶管机定位定向系统优选技术方案中,所述控制模块具体用于:
19、根据所述姿态角数据,计算所述地理坐标系到所述顶管机的载体坐标系的方向余弦姿态矩阵;
20、根据所述方向余弦姿态矩阵、所述里程增量数据计算所述顶管机在所述地理坐标系三坐标轴上的坐标增量;
21、根据所述坐标增量数据、所述捷联惯组设备始发时刻初始坐标数据,计算所述当前时刻坐标。
22、上述一种顶管机定位定向系统优选技术方案中,所述控制模块具体用于:根据姿态矩阵计算公式计算所述姿态矩阵,所述姿态矩阵计算公式为:
23、
24、
25、其中,为所述姿态矩阵,ψ为所述方位角,θ为所述俯仰角,γ为所述滚动角,cij(i,j=1,2,3)表示第i行第j列的元素。
26、上述一种顶管机定位定向系统优选技术方案中,所述控制模块具体用于:
27、根据坐标增量计算公式计算所述坐标增量,所述坐标增量计算公式为:
28、
29、其中,ni表示第i时刻所述顶管机在所述地理坐标北向坐标轴上的坐标增量,ei表示第i时刻所述顶管机在所述地理坐标系东向坐标轴上的坐标增量,hi表示第i时刻所述顶管机在所述地理坐标系天向坐标轴上的坐标增量,表示所述顶管机在第i时刻的里程增量。
30、上述一种顶管机定位定向系统优选技术方案中,所述控制模块具体用于:
31、根据坐标计算公式计算所述当前时刻坐标,所述坐标计算公式为:
32、
33、其中,nt为所述顶管机在所述北向坐标轴上的当前时刻坐标,et为所述顶管机在所述东向坐标轴上的当前时刻坐标,ht为所述顶管机在所述天向坐标轴上的当前时刻坐标,n0为所述顶管机在所述北向坐标轴上的始发时刻初始坐标,e0为所述顶管机在所述东向坐标轴上的始发时刻初始坐标,h0为所述顶管机在所述天向坐标轴上的始发时刻初始坐标。
34、上述一种顶管机定位定向系统优选技术方案中,所述液体静力高程测量装置包括水箱,所述水箱与水管连通;
35、所述水管上设有第一基点压力传感器、第二基点压力传感器、所述测点压力传感器,所述第一基点压力传感器用于检测所述水管上第一基点的压力值,所述第二基点压力传感器用于检测所述水管上第二基点的压力值,所述测点压力传感器用于检测所述水管上所述测点的压力值;
36、所述第一基点压力传感器、所述第二基点压力传感器位于所述掘进管道外部,所述第一基点与所述第二基点一上一下分布;
37、所述测点压力传感器设于所述顶管机盾体内部;
38、所述控制模块具体用于:根据高程差计算公式,计算所述高程差,所述高程差计算公式为:
39、
40、其中,ha为所述第一基点高程,hb为所述第二基点高程,hc为所述测点高程,pa为所述第一基点的压力值,pb为所述第二基点的压力值,pc为所述测点的压力值。
41、上述一种顶管机定位定向系统优选技术方案中,所述控制模块包括工控机,所述工控机位于所述掘进管道外部,所述工控机用于:
42、通过光纤控制所述捷联惯组设备测量所述顶管机的姿态角;
43、通过光纤控制所述液体静力高程测量装置测量所述高程差。
44、本技术提供的一种顶管机定位定向系统,具有以下技术效果:
45、1、捷联惯组、里程计与静力高程系统组合获取位置、姿态、高程数据,无需外接测量数据,即可进行自主导航,所需测量空间小,抗干扰能力强,可靠性高,能够满足长距离、小直径、小转弯、高精度的顶管机定位定向测量要求;
46、2、系统直接计算出基于“东-北-天”地理坐标系的施工坐标,无需经高斯投影将“经-纬-高”大地坐标向“东-北-天”施工坐标进行坐标转换,免去了坐标转换带来的误差。
- 还没有人留言评论。精彩留言会获得点赞!