本发明涉及航迹关联的,尤其是涉及一种目标航迹的关联方法、装置、电子设备和计算机存储介质。
背景技术:
1、目前为止,雷达航迹关联算法提出了很多种,一类是极大似然类关联算法,是以观测序列的似然比为基础,下面又包括航迹分叉法、联合似然算法、广义相关法等。另一类是贝叶斯类关联算法,以贝叶斯准则为基础,如最近邻法、概率数据互联法(pdaf)、联合概率数据互联法(jpda)、最优贝叶斯算法等。虽然这些算法比较成熟,但均是针对未知目标提出的,且有些算法计算量很大。
2、如何在已知目标各参数的情况下,快速的实现目标航迹关联成为目前亟需解决的技术问题。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种目标航迹的关联方法、装置、电子设备和计算机存储介质,以缓解现有技术无法在已知目标各参数的情况下,快速的实现目标航迹关联的技术问题。
2、第一方面,本发明实施例提供了一种目标航迹的关联方法,包括:
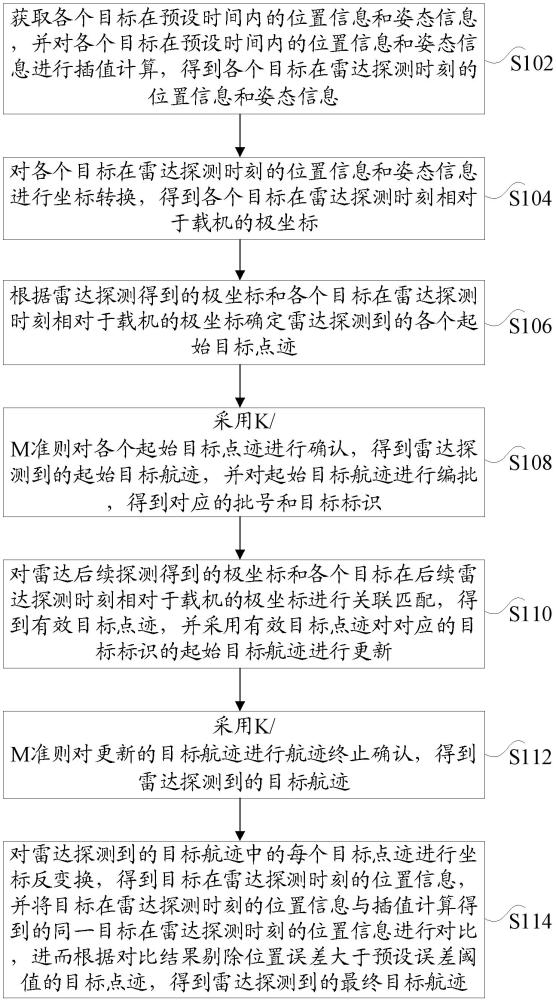
3、获取各个目标在预设时间内的位置信息和姿态信息,并对各个目标在预设时间内的位置信息和姿态信息进行插值计算,得到各个目标在雷达探测时刻的位置信息和姿态信息;
4、对各个目标在雷达探测时刻的位置信息和姿态信息进行坐标转换,得到各个目标在雷达探测时刻相对于载机的极坐标,其中,所述载机为承载所述雷达的飞机;
5、根据雷达探测得到的极坐标和各个目标在雷达探测时刻相对于载机的极坐标确定所述雷达探测到的各个起始目标点迹;
6、采用k/m准则对各个起始目标点迹进行确认,得到所述雷达探测到的起始目标航迹,并对所述起始目标航迹进行编批,得到对应的批号和目标标识;
7、对雷达后续探测得到的极坐标和各个目标在后续雷达探测时刻相对于载机的极坐标进行关联匹配,得到有效目标点迹,并采用所述有效目标点迹对对应的目标标识的起始目标航迹进行更新;
8、采用k/m准则对更新的目标航迹进行航迹终止确认,得到雷达探测到的目标航迹;
9、对所述雷达探测到的目标航迹中的每个目标点迹进行坐标反变换,得到目标在雷达探测时刻的位置信息,并将目标在雷达探测时刻的位置信息与插值计算得到的同一目标在雷达探测时刻的位置信息进行对比,进而根据对比结果剔除位置误差大于预设误差阈值的目标点迹,得到所述雷达探测到的最终目标航迹。
10、进一步的,对各个目标在预设时间内的位置信息和姿态信息进行插值计算,包括:
11、采用aitken插值方法对各个目标在预设时间内的位置信息和姿态信息进行插值计算,得到各个目标在雷达探测时刻的位置信息和姿态信息。
12、进一步的,对各个目标在雷达探测时刻的位置信息和姿态信息进行坐标转换,包括:
13、将各个目标在雷达探测时刻的所述位置信息和所述姿态信息转换到载机地理坐标系,得到各个目标在雷达探测时刻相对于载机的位置坐标;
14、将各个目标在雷达探测时刻相对于载机的位置坐标转换到载机机体坐标系,得到各个目标在雷达探测时刻相对于载机的极坐标。
15、进一步的,根据雷达探测得到的极坐标和各个目标在雷达探测时刻相对于载机的极坐标确定所述雷达探测到的各个起始目标点迹,包括:
16、将雷达探测得到的方位角、俯仰角和各个目标在雷达探测时刻相对于载机的方位角、俯仰角进行对比,得到与雷达探测得到的方位角、俯仰角匹配的目标;
17、从所述匹配的目标中确定距离雷达探测得到的斜距最近的终极目标,并确定所述终极目标在雷达探测时刻相对于载机的斜距与雷达探测得到的斜距的差值是否小于预设阈值;
18、若小于,则将所述终极目标作为所述雷达探测到的起始目标点迹。
19、进一步的,对雷达后续探测得到的极坐标和各个目标在后续雷达探测时刻相对于载机的极坐标进行关联匹配,包括:
20、根据雷达后续探测得到的极坐标计算雷达后续探测得到的第一波束张角,并根据各个目标在后续雷达探测时刻相对于载机的极坐标计算各个目标在后续雷达探测时刻相对于载机的第二波束张角;
21、基于所述第一波束张角和所述第二波束张角之间的差值在所述目标中确定候选目标;
22、根据雷达后续探测位置和各个候选目标在后续雷达探测时刻相对于载机的位置计算欧拉距离;
23、在所述欧拉距离中确定最小欧拉距离对应的最终目标,并确定所述最终目标对应的欧拉距离是否小于波门,其中,所述波门的计算算式包括,其中,表示所述波门,表示目标最大径向速度设定值,表示前后时间间隔,表示波门系数;
24、若小于,则确定所述最终目标为所述有效目标点迹。
25、进一步的,对所述雷达探测到的目标航迹中的每个目标点迹进行坐标反变换,包括:
26、将每个目标点迹转换到载机地理坐标系,得到目标在雷达探测时刻相对于载机的位置坐标;
27、将目标在雷达探测时刻相对于载机的位置坐标转换到大地坐标系,得到目标在雷达探测时刻的位置信息。
28、进一步的,所述雷达后续探测位置为根据所述雷达后续探测得到的极坐标计算得到的;
29、各个候选目标在后续雷达探测时刻相对于载机的位置为根据各个目标在后续雷达探测时刻相对于载机的极坐标计算得到的。
30、第二方面,本发明实施例还提供了一种目标航迹的关联装置,包括:
31、插值计算单元,用于获取各个目标在预设时间内的位置信息和姿态信息,并对各个目标在预设时间内的位置信息和姿态信息进行插值计算,得到各个目标在雷达探测时刻的位置信息和姿态信息;
32、坐标转换单元,用于对各个目标在雷达探测时刻的位置信息和姿态信息进行坐标转换,得到各个目标在雷达探测时刻相对于载机的极坐标,其中,所述载机为承载所述雷达的飞机;
33、确定单元,用于根据雷达探测得到的极坐标和各个目标在雷达探测时刻相对于载机的极坐标确定所述雷达探测到的各个起始目标点迹;
34、起始目标航迹确认单元,用于采用k/m准则对各个起始目标点迹进行确认,得到所述雷达探测到的起始目标航迹,并对所述起始目标航迹进行编批,得到对应的批号和目标标识;
35、关联匹配单元,用于对雷达后续探测得到的极坐标和各个目标在后续雷达探测时刻相对于载机的极坐标进行关联匹配,得到有效目标点迹,并采用所述有效目标点迹对对应的目标标识的起始目标航迹进行更新;
36、目标航迹确认单元,用于采用k/m准则对更新的目标航迹进行航迹终止确认,得到雷达探测到的目标航迹;
37、坐标反变换单元,用于对所述雷达探测到的目标航迹中的每个目标点迹进行坐标反变换,得到目标在雷达探测时刻的位置信息,并将目标在雷达探测时刻的位置信息与插值计算得到的同一目标在雷达探测时刻的位置信息进行对比,进而根据对比结果剔除位置误差大于预设误差阈值的目标点迹,得到所述雷达探测到的最终目标航迹。
38、第三方面,本发明实施例还提供了一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述第一方面任一项所述的方法的步骤。
39、第四方面,本发明实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有机器可运行指令,所述机器可运行指令在被处理器调用和运行时,所述机器可运行指令促使所述处理器运行上述第一方面任一项所述的方法。
40、在本发明实施例中,提供了一种目标航迹的关联方法,包括:获取各个目标在预设时间内的位置信息和姿态信息,并对各个目标在预设时间内的位置信息和姿态信息进行插值计算,得到各个目标在雷达探测时刻的位置信息和姿态信息;对各个目标在雷达探测时刻的位置信息和姿态信息进行坐标转换,得到各个目标在雷达探测时刻相对于载机的极坐标,其中,载机为承载雷达的飞机;根据雷达探测得到的极坐标和各个目标在雷达探测时刻相对于载机的极坐标确定雷达探测到的各个起始目标点迹;采用k/m准则对各个起始目标点迹进行确认,得到雷达探测到的起始目标航迹,并对起始目标航迹进行编批,得到对应的批号和目标标识;对雷达后续探测得到的极坐标和各个目标在后续雷达探测时刻相对于载机的极坐标进行关联匹配,得到有效目标点迹,并采用有效目标点迹对对应的目标标识的起始目标航迹进行更新;采用k/m准则对更新的目标航迹进行航迹终止确认,得到雷达探测到的目标航迹;对雷达探测到的目标航迹中的每个目标点迹进行坐标反变换,得到目标在雷达探测时刻的位置信息,并将目标在雷达探测时刻的位置信息与插值计算得到的同一目标在雷达探测时刻的位置信息进行对比,进而根据对比结果剔除位置误差大于预设误差阈值的目标点迹,得到雷达探测到的最终目标航迹。通过上述描述可知,本发明的目标航迹的关联方法中,能够在已知各个目标的位置信息和姿态信息的情况下,快速的进行目标航迹的关联,计算精度高,实时性好,缓解了现有技术无法在已知目标各参数的情况下,快速的实现目标航迹关联的技术问题。