高精导航图智能疏密曲线离散折线方法、装置及设备与流程
本发明涉及电子地图,尤其是涉及一种高精导航图智能疏密曲线离散折线方法、装置及设备。
背景技术:
1、高精度地图是一种包含了道路、交通标志、车道线等详细信息的地图,其精度可以达到厘米级甚至更高。与传统的导航地图相比,高精度地图更加精细化,不仅能够显示道路的基本结构,还能够呈现出路面的起伏、交叉口的复杂情况等细节,为自动驾驶系统提供更为准确的环境信息。
2、众所周知,基于地理信息系统(gis)的电子地图所支持点、线、面等类型,但对于曲线的支持力度有限。而对于属于电子地图中的高精度地图对现实的表述精度要求更高。不同点密度的折线对于现实的表述随着特征点密度的增加,其表述细节更加细腻丰富,而高精度地图对精度的要求非曲线不足以表达。其中,曲线为二阶可导的公式表达,不同于折线的有序坐标对表达。
3、目前,相关技术提供了以下曲线离散算法,其存在的缺点:
4、(1)直接修改渲染平台,使之支持曲线的渲染,其缺点是,由于曲线的渲染过程最终还是需要离散成折线,且几乎不能适应既有技术。
5、(2)等路程或单维度等距离离散折线,其缺点是,若离散步长过密,则计算量和存储量都等比例上升,若离散步长过疏,则容易丢失特征点,难以表述线性细节。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种高精导航图智能疏密曲线离散折线方法、装置及设备,可以以最小的留取点数量保留道路曲线数据中最多的特征细节,兼顾了要素的线形细节特征和存储量。
2、第一方面,本发明实施例提供了一种高精导航图智能疏密曲线离散折线方法,包括:
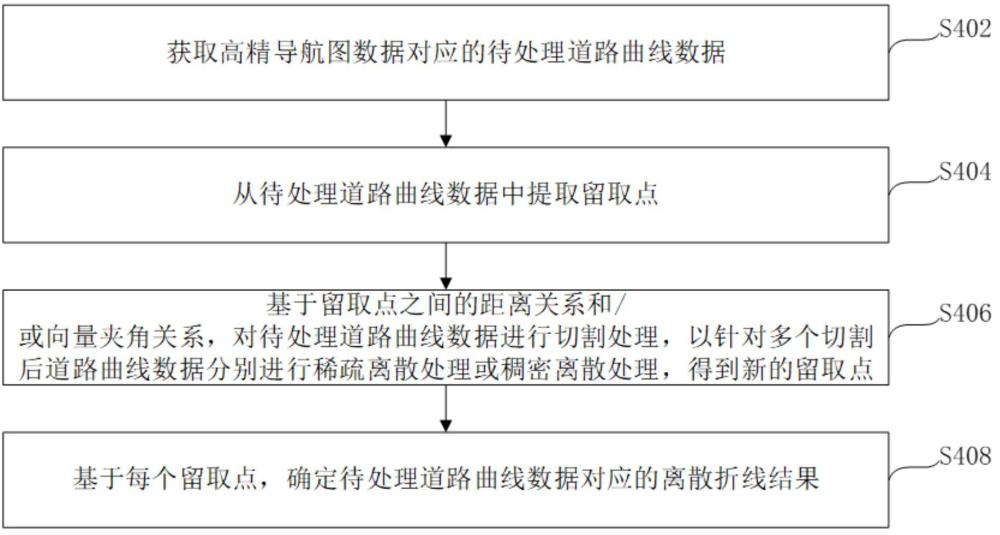
3、获取高精导航图数据对应的待处理道路曲线数据;
4、从所述待处理道路曲线数据中提取留取点;其中,所述留取点包括待处理道路曲线数据的起始点和终止点;
5、基于所述留取点之间的距离关系和/或向量夹角关系,对所述待处理道路曲线数据进行切割处理,以针对多个切割后道路曲线数据分别进行稀疏离散处理或稠密离散处理,得到新的留取点;
6、基于每个所述留取点,确定所述待处理道路曲线数据对应的离散折线结果。
7、在一种实施方式中,基于所述留取点之间的距离关系和/或向量夹角关系,对所述待处理道路曲线数据进行切割处理,以针对多个切割后道路曲线数据分别进行稀疏离散处理或稠密离散处理,得到新的留取点的步骤,包括:
8、基于所述待处理道路曲线数据中的指定点,确定所述留取点之间的距离关系和向量夹角关系;
9、如果所述距离关系不满足预设距离关系,或,所述向量夹角关系不满足预设向量夹角关系,则将所述指定点作为新的所述留取点,并利用所述指定点对所述处理道路曲线数据进行切割处理,得到切割后道路曲线数据;
10、继续基于所述切割后道路曲线数据中的所述指定点,确定新的所述留取点之间的距离关系和向量夹角关系,直至满足预设迭代停止条件,则停止对所述切割后道路曲线数据进行切割处理,以实现针对多个切割后道路曲线数据分别进行稀疏离散处理或稠密离散处理。
11、在一种实施方式中,基于所述待处理道路曲线数据中的指定点,确定所述留取点之间的距离关系的步骤,包括:
12、从所述待处理道路曲线数据中提取指定点;
13、所述起始点与所述指定点之间的第一距离、所述指定点与所述终止点之间的第二距离、确定起始点与终止点之间的第三距离;
14、通过所述第一距离、所述第二距离和所述第三距离之间的间距运算结果,表征所述留取点之间的距离关系。
15、在一种实施方式中,基于所述待处理道路曲线数据中的指定点,确定所述留取点之间的向量夹角关系的步骤,包括:
16、确定所述起始点对应的起始向量、所述终止点对应的终止向量、所述起始点指向所述指定点的第一向量、所述指定点指向所述终止点的第二向量;
17、确定所述起始向量与所述第一向量之间的第一向量夹角,以及确定所述终止向量与所述第二向量之间的第二向量夹角;
18、通过所述第一向量夹角和所述第二向量夹角表征所述留取点之间的向量夹角关系。
19、在一种实施方式中,在如果所述距离关系不满足预设距离关系,或,所述向量夹角关系不满足预设向量夹角关系的步骤之前,所述方法还包括:
20、判断所述距离关系对应的间距运算结果是否小于预设间距阈值;如果是,则确定所述距离关系满足预设距离关系;如果否,则确定所述距离关系不满足预设距离关系;
21、在所述距离关系满足预设距离关系的情况下,判断所述向量夹角关系对应的第一向量夹角和第二向量夹角是否均小于预设夹角阈值;如果是,则确定所述向量夹角关系满足预设向量夹角关系;如果否,则确定向量夹角关系不满足预设向量夹角关系。
22、在一种实施方式中,利用所述指定点对所述处理道路曲线数据进行切割处理,得到切割后道路曲线数据的步骤,包括:
23、以所述起始点与所述指定点之间的曲线线段,作为切割后道路曲线数据;以及,以所述指定点与所述终止点之间的曲线线段,作为另一切割后道路曲线数据。
24、在一种实施方式中,所述预设迭代停止条件包括:新的所述留取点之间的距离关系满足所述预设距离关系,且新的所述留取点之间的向量夹角关系满足预设向量夹角关系。
25、第二方面,本发明实施例还提供一种高精导航图智能疏密曲线离散折线装置,包括:
26、数据获取模块,用于获取高精导航图数据对应的待处理道路曲线数据;
27、留取点提取模块,用于从所述待处理道路曲线数据中提取留取点;其中,所述留取点包括待处理道路曲线数据的起始点和终止点;
28、离散处理模块,用于基于所述留取点之间的距离关系和/或向量夹角关系,对所述待处理道路曲线数据进行切割处理,以针对多个切割后道路曲线数据分别进行稀疏离散处理或稠密离散处理,得到新的留取点;
29、结果确定模块,用于基于每个所述留取点,确定所述待处理道路曲线数据对应的离散折线结果。
30、第三方面,本发明实施例还提供一种电子设备,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机可执行指令,所述处理器执行所述计算机可执行指令以实现第一方面提供的任一项所述的方法。
31、第四方面,本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令在被处理器调用和执行时,计算机可执行指令促使处理器实现第一方面提供的任一项所述的方法。
32、本发明实施例提供的一种高精导航图智能疏密曲线离散折线方法、装置及设备,首先获取高精导航图数据对应的待处理道路曲线数据,并从待处理道路曲线数据中提取留取点,留取点包括待处理道路曲线数据的起始点和终止点;然后基于留取点之间的距离关系和/或向量夹角关系,对待处理道路曲线数据进行切割处理,以针对多个切割后道路曲线数据分别进行稀疏离散处理或稠密离散处理,得到新的留取点;最后基于每个留取点,确定待处理道路曲线数据对应的离散折线结果。上述方法在提取待处理道路曲线数据的留取点之后,通过留取点之间的距离关系和/或向量夹角关系对待处理道路曲线数据进行切割处理,从而对于较直的曲线部分稀疏离散,在曲率较大的曲线部分可以稠密离散,最终以最小的离散点数保留最多的特征细节,兼顾了要素的线形细节特征和存储量。
33、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
34、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!