基于InSAR与北斗数据的山体沉降分析方法及设备与流程
本说明书涉及地质监测,尤其涉及基于insar与北斗数据的山体沉降分析方法及设备。
背景技术:
1、山体沉降是指土地或建筑物下沉的现象,是地表向下运动的结果,是引发山体滑坡、崩塌等地质灾害的原因之一。山体沉降通常由地下开采、地下施工、自然地质条件变化等因素引起,对沉降情况进行实时监测预警,是预防沉降灾害的有效手段。
2、传统沉降测量方法包括水准测量、三角高程测量、gps测量等,它们都需要人工布设测量设备进行现场测量,由于山区地势复杂,难以开展传统测量工作。并且,水准测量和gps测量布设观测站时均是通过点、线的方式,所以它们所监测的结果不能够将整个山体范围内沉降的形变特征较全面的反映出来,而且不能进行长期连续的监测,难以实现全天时、全天候、大面积的实时监测。
3、目前,应用最为广泛的两种空间大地测量手段包括insar(interferometricsynthetic aperture radar,合成孔径雷达干涉测量)和gnss(全球卫星导航卫星系统)技术,它们解决了传统测量存在的问题,具有不受天气影响、面积大、成本低、精度高等优势。但是,insar及时序insar技术,使用不同日期的sar(合成孔径雷达)数据进行全域观测分析,数据间隔通常为几天到几个月,时间分辨率低。gnss技术,如bds(北斗卫星导航系统),通过在检测点布设地表位移监测设备,接收bds数据进行分析,对固定位置进行长时间持续检测,但不能获取面状数据,空间分辨率低。
4、现有的同类技术中,一般使用时序insar技术,如ps-insar(persistentscatterer insar,永久散射体合成孔径雷达干涉测量)或sbas-insar(small baselinesubset insar,短基线集合成孔径雷达干涉测量),和北斗地表形变位移检测仪的数据,通过对两种数据进行时空维度的插值、滤波和拟合等操作,获得观测区域沉降值。但上述两种技术存在以下不足:
5、1、ps-insar技术依赖稳定地面目标,即ps点,通常ps点在观测区域内分布不均匀,且一般为人造目标,在山区等环境中,能找到的ps点较少。
6、2、sbas-insar技术对于山体沉降检测容易受到时空失相干与大气延迟的影响,精度较低,且不能检测大幅度沉降。
7、3、获取地表三维形变时,仅融合insar监测的一维雷达视线方向(line of sight,los)形变速率和bds插值的水平向形变速率,受bds插值形变精度影响大,难以应用于山区等复杂地形。
技术实现思路
1、本说明书实施例提供了基于insar与北斗数据的山体沉降分析方法及设备,用于解决如下技术问题:现有的空间地表测量技术,容易受观测区域影响,山体沉降检测的精度较低,难以应对复杂的山区地形,并且空间分辨率较低,数据处理效率缓慢。
2、本说明书实施例采用下述技术方案:
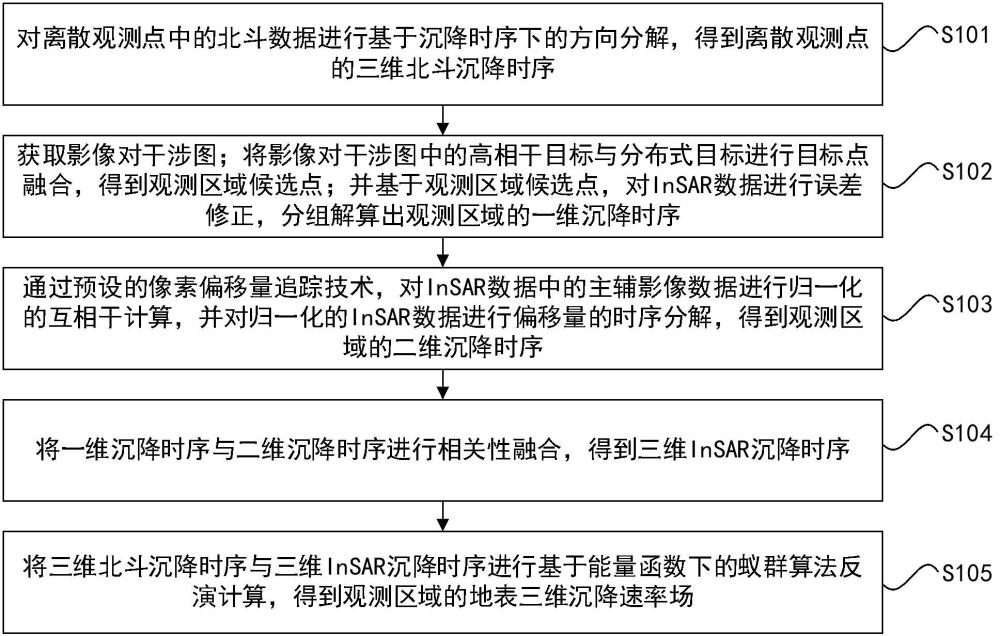
3、一方面,本说明书实施例提供了基于insar与北斗数据的山体沉降分析方法,包括:对离散观测点中的北斗数据进行基于沉降时序下的方向分解,得到所述离散观测点的三维北斗沉降时序;获取的影像对干涉图;将所述影像对干涉图中的高相干目标与分布式目标进行目标点融合,得到观测区域候选点;并基于所述观测区域候选点,对insar数据进行误差修正,分组解算出观测区域的一维沉降时序;通过预设的像素偏移量追踪技术,对所述insar数据中的主辅影像数据进行归一化的互相干计算,并对归一化的insar数据进行偏移量的时序分解,得到所述观测区域的二维沉降时序;将所述一维沉降时序与所述二维沉降时序进行相关性融合,得到三维insar沉降时序;将所述三维北斗沉降时序与所述三维insar沉降时序进行基于能量函数下的蚁群算法反演计算,得到所述观测区域的地表三维沉降速率场。
4、本说明书实施例通过融合后的insar三维沉降时序,再与离散观测点的连续三维北斗沉降时序进行沉降时序融合,并结合gibbs(gibbs free energy,吉布斯)能量函数,最终得出观测区域连续时空的三维时序沉降量和三维沉降速率。同时提高了分辨率与测量精度,覆盖范围更加广,且处理效率快。采用ds-insar(distributed scatterers, ds,分布式散射体合成孔径雷达干涉测量)技术手段还能获取更多分布式目标点,并结合偏移量追踪方法,得到空间分辨率高的insar三维沉降时序。再融合时间分辨率高的北斗三维沉降时序,得到时空分辨率高的高精度地表三维沉降时序,大幅度提高了对insar数据的处理效率。
5、在一种可行的实施方式中,对离散观测点中的北斗数据进行基于沉降时序下的方向分解,得到所述离散观测点的三维北斗沉降时序,具体包括:基于北斗卫星导航系统,获取所述观测区域中离散观测点的原始北斗数据;通过预设的turboedit算法,对所述原始北斗数据进行数据信号的周跳修复,并通过预设的hht算法,对修复后的原始北斗数据进行多路径效应的消除处理,得到第一北斗数据;对所述第一北斗数据进行方向矢量下的沉降时序分解,得到所述离散观测点的三维北斗沉降时序;其中,方向矢量包括:南北方向矢量、东西方向矢量以及垂直方向矢量。
6、在一种可行的实施方式中,获取的影像对干涉图;将所述影像对干涉图中的高相干目标与分布式目标进行目标点融合,得到观测区域候选点,具体包括:获取观测区域中多种卫星数据;其中,所述多种卫星数据包括:多景sar卫星影像、精密轨道参数文件以及dem数据;对所述多种卫星数据进行差分干涉处理,得到若干所述影像对干涉图;对所述影像对干涉图进行有关振幅离差的指数计算,并根据计算后的指数特征,提取所述影像对干涉图中的高相干目标候选点;识别所述影像对干涉图中的若干同质像元;通过预设的样本相干矩阵,将所述若干同质像元进行emi相位优化,并提取优化后影像对干涉图中的分布式目标候选点;根据卡尔曼滤波融合技术,将所述高相干目标候选点与所述分布式目标候选点进行统合处理,得到所述观测区域中的观测区域候选点。
7、在一种可行的实施方式中,基于所述观测区域候选点,对insar数据进行误差修正,分组解算出观测区域的一维沉降时序,具体包括:通过所述观测区域候选点,构建出所述insar数据中有关空间分布的三角网格;通过预设的马尔可夫随机场以及连续运行参考站系统,将每个三角网格中影像对干涉图的像元数进行相位解缠处理,得到第一insar数据;基于ecmwf数据和gnss站点数据,并通过预设的迭代对流层模型,对第一insar数据中的insar升降轨数据进行大气延迟误差的修正处理,得到第二insar数据;其中,所述insar升降轨数据为所述insar数据中的升轨数据以及降轨数据;所述修正处理为通过修正产品gacoss的通用修正处理;将所述第二insar数据中的升轨数据以及降轨数据进行雷达视线方向下的沉降时序的分组计算,得到所述一维沉降时序。
8、在一种可行的实施方式中,通过预设的像素偏移量追踪技术,对所述insar数据中的主辅影像数据进行归一化的互相干计算,具体包括:根据观测区域中多种卫星数据,将所述insar数据中的主辅影像数据进行主辅影像的粗配准处理,得到第一主辅配准影像;通过预设的搜索窗口,对所述第一主辅配准影像进行同名点像素的标识处理,并对标识后的所述同名点像素进行最小二乘拟合处理,确定出第二主辅配准影像;通过所述搜索窗口,将所述第二主辅配准影像进行主辅影像的相关性计算,得到所述主辅影像的相关系数,并根据所述相关系数中的系数峰值,对所述第二主辅配准影像进行亚像素级配准,确定出第三主辅配准影像;基于预设的相干性追踪法,将所述第三主辅配准影像进行有关图像窗口的矩阵转化,得到主辅窗口矩阵;其中,所述主辅窗口包括:主影像窗口矩阵以及辅影像窗口矩阵;通过二维傅里叶转换算法,将所述主辅窗口矩阵进行频率域计算,得到主影像相关功率以及辅影相关功率;对所述主影像相关功率以及所述辅影相关功率进行相位差计算,得到时域下基于所述主辅影像数据的局部偏移量。
9、在一种可行的实施方式中,对归一化的insar数据进行偏移量的时序分解,得到所述观测区域的二维沉降时序,具体包括:将归一化后的insar数据中的局部偏移量与精密轨道参数文件中的卫星轨道偏移量进行相减处理,得到所述insar数据的沉降偏移量;对所述沉降偏移量进行有关沉降场的多向量时序分解,确定出距离向沉降场以及方位向沉降场;将所述距离向沉降场以及所述方位向沉降场均进行地理编码处理,得到所述观测区域的二维沉降时序。
10、在一种可行的实施方式中,将所述一维沉降时序与所述二维沉降时序进行相关性融合,得到三维insar沉降时序,具体包括:通过预设的相关性算法,对所述观测区域进行有关沉降场区域的梯度大小划分,得到大梯度沉降区域以及小梯度沉降区域;根据所述大梯度沉降区域与所述小梯度沉降区域之间的区域占比,对所述一维沉降时序与所述二维沉降时序进行权重划分,分别得到一维沉降权重以及二维沉降权重;基于所述一维沉降权重以及二维沉降权重,将所述一维沉降时序与所述二维沉降时序进行相关性融合,得到所述insar数据的所述三维insar沉降时序;其中,所述三维insar沉降时序包括:雷达视线方向量、距离向量以及方位向量。
11、在一种可行的实施方式中,在将所述三维北斗沉降时序与所述三维insar沉降时序进行基于能量函数下的蚁群算法反演计算,得到所述观测区域的地表三维沉降速率场之前,所述方法还包括:根据,得到基于所述三维insar沉降时序的insar升轨量;其中,k为数学常数,为地表在南北向、东西向与垂直向上的沉降矢量;为insar雷达视线方向上所述insar升轨量在南北向、东西向与垂直向的单位投影矢量;为所述insar升轨量中在雷达视线方向的沉降矢量;为所述insar升轨量的地表沉降标准差;根据,得到基于所述三维insar沉降时序的insar降轨轨量;其中,insar雷达视线方向上所述insar降轨轨量在南北向、东西向与垂直向的单位投影矢量;为所述insar降轨轨量中在雷达视线方向的沉降矢量;为所述insar降轨轨量的地表沉降标准差;根据,得到基于所述三维北斗沉降时序的北斗观测值约束量;其中,为所述三维北斗沉降时序中北斗雷达视线方向上的地表沉降标准差,为所述三维北斗沉降时序中升轨量对应的地表沉降标准差,为所述三维北斗沉降时序中降轨量对应的地表沉降标准差;、以及分别为所述三维北斗沉降时序中北斗沉降场在南北向、东西向与垂直向上的内插沉降矢量;i为数学常数;根据,得到所述能量函数;其中,n为所述观测区域的影像对干涉图中的像元数量。
12、在一种可行的实施方式中,将所述三维北斗沉降时序与所述三维insar沉降时序进行基于能量函数下的蚁群算法反演计算,得到所述观测区域的地表三维沉降速率场,具体包括:通过预设的蚁群算法,将基于所述三维北斗沉降时序与所述三维insar沉降时序所生成能量函数进行连续空间计算,得到所述能量函数的最小值;基于所述能量函数的最小值,对所述能量函数进行反演计算,得到所述观测区域的地表三维沉降速率场;其中,所述地表三维沉降速率场包括:地表三维沉降量以及地表三维沉降速率。
13、另一方面,本说明书实施例还提供了基于insar与北斗数据的山体沉降分析设备,所述设备包括:至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有能够被所述至少一个处理器执行的指令,以使所述至少一个处理器能够执行上述任一实施例所述的基于insar与北斗数据的山体沉降分析方法。
14、本说明书实施例提供了基于insar与北斗数据的山体沉降分析方法及设备,与现有技术相比,具有以下有益的技术效果:
15、本说明书实施例通过融合后的insar三维沉降时序,再与离散观测点的连续三维北斗沉降时序进行沉降时序融合,并结合gibbs(gibbs free energy,吉布斯)能量函数,最终得出观测区域连续时空的三维时序沉降量和三维沉降速率。同时提高了分辨率与测量精度,覆盖范围更加广,且处理效率快。采用ds-insar(distributed scatterers,ds,分布式散射体合成孔径雷达干涉测量)技术手段还能获取更多分布式目标点,并结合偏移量追踪方法,得到空间分辨率高的insar三维沉降时序。再融合时间分辨率高的北斗三维沉降时序,得到时空分辨率高的高精度地表三维沉降时序,大幅度提高了对insar数据的处理效率。
- 还没有人留言评论。精彩留言会获得点赞!