本发明涉及巡检机器人,具体为一种煤矿机器人用智能识别系统。
背景技术:
1、传统的巡检任务通常由人工完成,这既费时又费力,并且存在一定的安全风险。随着人工智能和机器人技术的快速发展,自动化巡检系统逐渐成为一种趋势。为了提高煤矿井下变电所和水泵房等设施的安全性和效率,针对变电所及水泵房内的煤矿巡检机器人已被研究;
2、但现有的巡检机器人的功能过于单一,其采集的数据及可实现的功能过少,无法适配变电所及水泵房内多种不同类型的设备巡检,因此,设计一种煤矿机器人用智能识别系统。
技术实现思路
1、本发明的目的在于解决现有的巡检机器人的功能过于单一,其采集的数据及可实现的功能过少,无法适配变电所及水泵房内多种不同类型的设备巡检的问题,而提出一种煤矿机器人用智能识别系统。
2、本发明的目的可以通过以下技术方案实现:
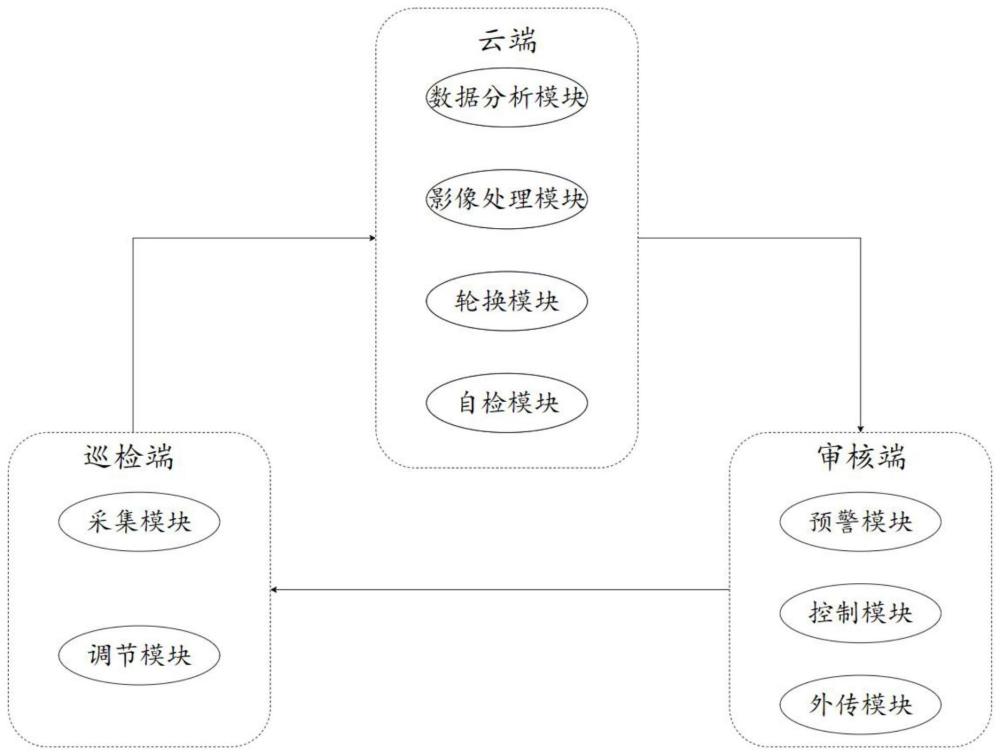
3、一种煤矿机器人用智能识别系统,包括:
4、巡检端,用于通过采集模块利用巡检机器人对待测区域不同设备进行数据的采集;通过调节模块对巡检机器人位置及高度进行自动调节;
5、自动调节的具体过程包括:通过基于slam融合导航技术,实现全自主导航,对巡检端的检测位置进行调节;
6、针对不同高度的设备信息采集利用云台升降改变高度,实现精准的数据采集;
7、并将获取的视频、环境参数及运行状况参数向云端进行上传;
8、云端,用于通过数据分析模块对采集模块采集的数据进行分析并生成异常信令;通过影像处理模块对巡检端获取的视频数据进行预处理提高视频质量;通过轮换模块在待测区域中存在人工巡检的情况时对巡检机器人进行充电,实现轮换巡检的效果;还通过自检模块用于当巡检机器人在充电时进行自检及保养;
9、审核端,用于通过预警模块对出现不同的异常信令进行预警;
10、具体的:
11、接收云端中经过数据分析模块生成的异常信令,异常信令包括气体异常信令、温湿异常信令、烟雾异常信令、异响信令、设仪异常信令及设指异常信令;
12、当接收到异常信令后,将相对应设备及时间视频数据向审核端进行发送,通过人工对相对应的异常信令结合视频进行审核;
13、设置一个等待时间,当超过预设的等待时间后,检测人工审核没有任何动作时,判断人工处于离线状态;
14、当判断人工处于离线状态时,则直接向巡检端发送警示指令,通过巡检端上的警示灯和蜂鸣器进行声光报警,并在报警的同时控制整个巡检端向其他区域移动,吸引作业人员的注意;
15、同时向管理人员的移动端发送警报及警示内容。
16、进一步的,所述采集模块进行数据的采集过程包括:
17、通过高清摄像头对待测区域进行视频采集,对现场状况实时监控;
18、获取待检设备的实时温度及运行状况参数,运行状况参数包括设备仪表数据、开关情况及指示灯颜色;
19、对待测区域的环境参数进行采集,环境参数包括气体、温湿度、烟雾及噪音参数。
20、进一步的,所述数据分析模块对采集的数据进行分析并生成异常信令的具体操作步骤如下:
21、首先获取巡检端采集的环境参数数据;
22、对气体、温湿度、烟雾及噪音分别进行比对分析;
23、其中气体的采集包括空气中o2、co、ch4、h2s及co2含量;
24、对每个设备均预设气体含量区间,具体的包括o2含量区间、co含量区间、ch4含量区间、h2s含量区间及co2含量区间;
25、将获取的空气中o2、co、ch4、h2s及co2含量分别与预设的气体含量区间进行比对,当出现气体含量超过预设的气体含量区间时,生成气体异常信令;
26、预设正常温湿度区间,并与获取的温湿度进行实时比对,当温湿度超过预设正常温湿度区间时,则生成温湿异常信令;
27、预设正常烟雾浓度区间,并与获取的烟雾浓度与正常烟雾浓度区间进行比对,当超出正常烟雾浓度区间内,则生成烟雾异常信令;
28、预设正常噪音区间,并与获取的噪音与正常噪音区间进行比对,当超出正常噪音区间范围内时,则生成异响信令;
29、预设的气体含量区间、正常温湿度区间、正常烟雾浓度区间及正常噪音区间针对每个设备均不同,并根据不同设备的运行的状态改变不同的预设正常区间;
30、获取设备的运行状况参数包括设备仪表数据、开关情况及指示灯颜色;
31、将设备仪表显示的数据进行提取,并与仪表正常显示数据计算差值,当差值大于预设阈值时,确定设备仪表数据显示异常的类型,并生成设仪异常信令;
32、对设备开关位置进行定位,并通过开关显示判断设备是否处于启动状态;
33、对设备的多个指示灯的颜色进行获取,当检测到指示灯异常后生成设指异常信令。
34、进一步的,所述影像处理模块对巡检端获取的视频数据进行预处理的具体操作步骤如下:
35、首先将获取的视频数据解码为原始像素数据;
36、再利用高斯滤波器、中值滤波器及双边滤波器来平滑图像并去除噪声,从而减少噪声的影响;
37、然后通过应用直方图均衡化及对比度增强或锐化根据应用场景需要对视频图像进行增强,提高图像质量及可视化效果;
38、将完成预处理的视频数据进行分割,根据不同对象或区域进行单独分割,完成分割后,对每个分割后的视频数据根据内容进行标题及时间注释;
39、最后将数据中大于预设数据量的视频进行压缩。
40、进一步的,所述轮换模块进行巡检轮换的具体操作步骤如下:
41、首先通过待测区域内的固定监控对待测区域里巡检人员进行监控,当待测区域内出现巡检人员时,进行计时,当超过预设时间段后,巡检人员依然存在,则向巡检端发送修整信令;
42、巡检端收到修正信令后,通过调节模块中全自主导航控制巡检机器人自动回到充电位置进行电量的补充,并将修整信令同时向巡检人员移动端发送,提示巡检人员进行人工巡检;
43、在人工巡检期间,持续对待测区域进行巡检人员的监控,当巡检人员消失超过预设时间段后,确定巡检机器人的充电电量,当电量未达到指定标准时,则持续进行充电;
44、当电量达到指定标准后,则根据巡检机器人最后消失的位置,并控制巡检机器人回到原来的位置继续进行巡检。
45、进一步的,所述自检模块进行自检的具体操作步骤如下:
46、在巡检机器人进行充电期间,采集巡检机器人的使用参数;
47、巡检机器人使用参数包括:巡检机器人的出厂时间及电池充放电次数,并计算巡检机器人的使用时间;巡检机器人的外部破损点及出现故障次数;
48、将获取的巡检机器人使用时间、电池充放电次数、外部破损点及出现故障次数分别归一化处理后分析计算得到风险值;
49、将得到的风险值与预设的风险阈值进行比对,当得到的实际风险值超过预设的风险阈值时,则生成保养信令;
50、收到保养信令后,规划巡检机器人的保养路线,自动导航至巡检机器人的保养基地,等待作业人员对巡检机器人进行保养;
51、到达保养基地后,自动向保养人员发送待保养指令,并判断空闲的保养人员,对此次保养结束的时间进行预判及显示。
52、进一步的,所述审核端中还设置有控制模块及外传模块,所述外传模块用于对巡检端的巡检记录及异常信息进行记录,并支持文件的下载导出,所述控制模块通过人工对巡检机器人进行位置及高度控制的具体操作步骤如下:
53、当存在人工控制巡检机器人的需求时;获取巡检机器人上监控设备采集的实时影像,判断巡检机器人目前的巡检区域;
54、接收人工控制指令,并向巡检端中的巡检机器人中发送,控制巡检机器人改变巡检位置到达人工所需巡检的指定区域;并再次获取影像数据,供人工进行审核查看;
55、其中在巡检区域针对每个不同的设备及设备的巡查部位均预设有定位坐标及相对应的标签,人工在控制过程中点击相对应的标签,则自动控制巡检端中巡检机器人自动移动至指定设备或设备的巡检部位中进行影像数据的获取;
56、同时也能通过数据分析模块汇总获取的设备开关位置,从而实现可以利用巡检机器人进行简易的开关操作;为人工控制提供更高的精度及效率。
57、与现有技术相比,本发明的有益效果是:
58、(1)本发明,可通过视觉及声音融合的方式实时检测变电所、水泵房内设备的运行状态,自动识别和记录设备显示屏上仪表显示的数值、开关状态、指示灯状态,搭载升降云台可对不同位置的目标进行识别,同时具备温湿度数据、烟雾、多种气体浓度参数采集等功能,将数字化的图像、声音和准确的数据实时分析并预警,实现巡检机器人的功能多样化;
59、(2)本发明,利用智能化控制的巡检机器人,可以通过远程控制或预设路径进行巡检任务,操作人员可以根据需要调整机器人的位置和高度,以适应不同的巡检环境;
60、(3)本发明,通过巡检区域内的监控视频对巡检区域内的巡检人员进行自动检测,并给予巡检机器人的充电修整时间,从而实现更加自动化的轮换巡检,为巡检区域内的设备提供更加安全的监测。