一种电缆外护套缺陷检测系统、方法、设备及介质与流程
本发明涉及电缆敷设,尤其是涉及一种电缆外护套缺陷检测系统、方法、设备及介质。
背景技术:
1、在电缆敷设过程中,电缆受复杂施工环境,特别是敷设路径的转弯处、竖井口等,及牵引力、侧压力、夹紧力等机械力作用,其外护套可能会产生如磕碰、开裂、变形、划痕等损伤缺陷;如果无法准确评估电缆外护套损伤缺陷的程度,损伤严重的将对后期电缆的投入运行造成影响。
2、目前,已存在沿电缆圆周均布若干个激光传感器的方式以进行电缆外护套缺陷检测,即每个激光传感器固定扫描各自负责的扫描范围,同时,电缆向前输送使得激光传感器与电缆产生相对运动,从而可完成整根电缆的扫描。由于电缆属于曲面目标,此方式下,激光传感器的激光束存在倾斜入射至电缆表面的情况,由此会产生倾角偏差而造成测量误差。特别是当激光束扫描至电缆圆周边缘,其倾角偏差越严重,如果电缆外护套的缺陷刚好处于激光束扫描边缘区域,则会产生检测盲区。除此之外,所用激光传感器数量越少,倾斜入射越严重,造成的测量误差也越大,而激光传感器数量增多则将增大成本。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种电缆外护套缺陷检测系统,解决了目前电缆外护套缺陷检测存在倾角测量误差和检测盲区的问题。
2、本发明还提供一种电缆外护套缺陷检测方法、一种电缆外护套缺陷检测设备和一种计算机可读存储介质。
3、根据本发明的第一方面实施例的电缆外护套缺陷检测系统,包括:
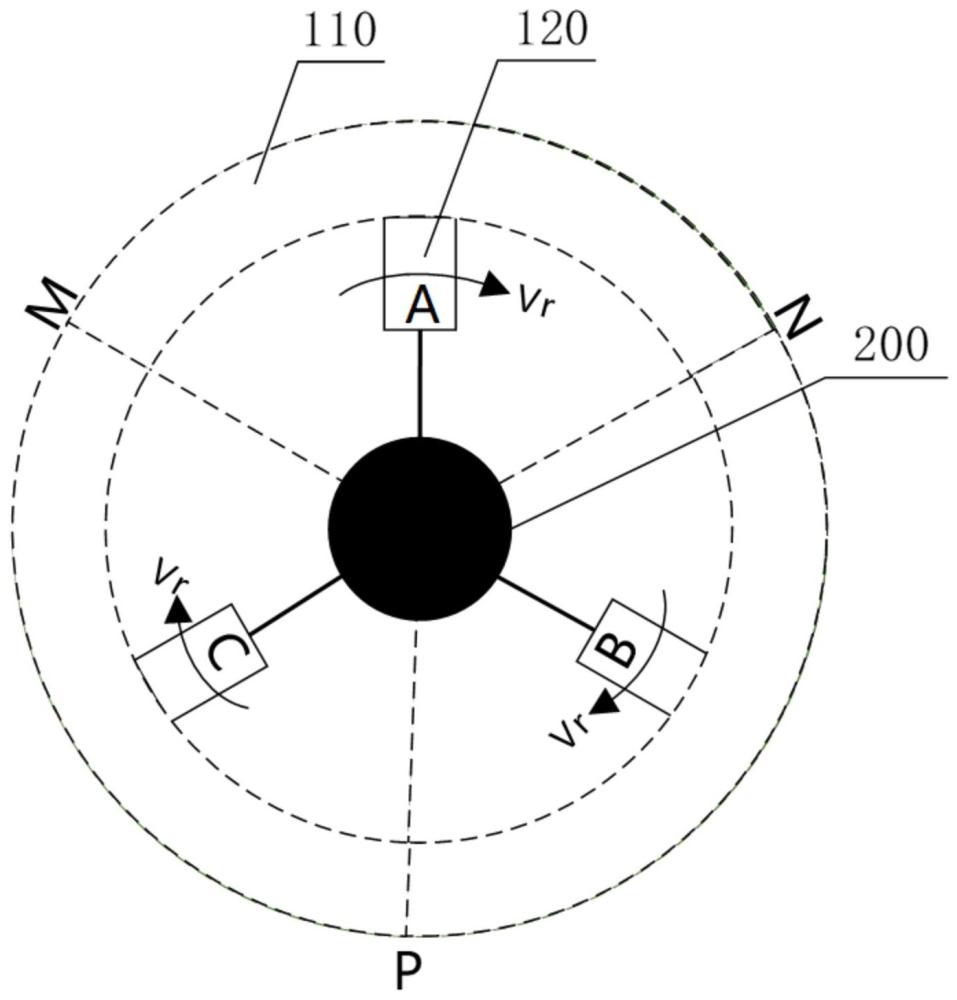
4、支撑轨道机构,由多个弧形体和多个弧形轨道组成,多个所述弧形体构成同轴的圆环体,所述圆环体中央用于穿过待测电缆,每个所述弧形轨道分别一一设置于每个所述弧形体的内侧,各个所述弧形轨道之间同轴共圆;
5、多个激光传感器,分别一一设置于多个所述弧形轨道上,每个所述激光传感器的激光发射方向皆朝向所述圆环体的轴心,用于采集所述待测电缆的扫描区域信息;
6、往复摆动模块,与多个所述激光传感器连接,用于驱动每个所述激光传感器在各自的所述弧形轨道上往复运动;
7、控制模块,分别与所述往复摆动模块、多个所述激光传感器电性连接,用于控制所述往复摆动模块的工作、以及获取多个所述激光传感器采集的所述扫描区域信息,并根据所述扫描区域信息识别出电缆外护套缺陷。
8、根据本发明实施例的电缆外护套缺陷检测系统,至少具有如下有益效果:
9、通过将多个激光传感器分别设置于支撑轨道机构内侧的多个弧形轨道上,在往复摆动模块的驱动下,使得各个激光传感器可围绕支撑轨道机构中心的待测电缆同步往复运动,同时激光传感器发射出激光束进行检测。基于本发明实施例系统的检测方式,每一激光束均为垂直入射至电缆外护套表面,因此有效解决了激光传感器静止布置方式下扫描电缆圆周存在倾角偏差、扫描曲面边缘存在缺陷检测盲区的问题。
10、根据本发明的一些实施例,所述往复摆动模块包括与所述激光传感器数量一致的多个往复摆动单元,每个所述往复摆动单元包括:
11、伺服电机,与所述控制模块电性连接;
12、传动摆臂,其一端与所述伺服电机连接,另一端与所述激光传感器连接;
13、测速编码器,至少用于检测所述伺服电机的转速。
14、根据本发明的一些实施例,所述控制模块包括:
15、运动控制器,与所述往复摆动模块电性连接,用于控制多个所述激光传感器在各自的所述弧形轨道上同步往复运动及运动速度;
16、激光控制器,分别与多个所述激光传感器电性连接,用于控制每个所述激光传感器的工作。
17、根据本发明的一些实施例,所述电缆外护套缺陷检测系统还包括:
18、通讯模块,分别与所述运动控制器、所述激光控制器电性连接,用于将每个所述激光传感器采集到的扫描区域信息传输至外部;
19、远程终端,与所述通讯模块电性连接,用于接收并处理每个所述扫描区域信息。
20、根据本发明的第二方面实施例的电缆外护套缺陷检测方法,应用于如本发明第一方面实施例任一项所述的电缆外护套缺陷检测系统,包括以下步骤:
21、获取待测电缆输送速度、待测电缆外径、激光传感器数量及激光传感器视场宽度;
22、根据所述待测电缆输送速度、所述待测电缆外径、所述激光传感器数量及所述激光传感器视场宽度,确定激光扫描速度;
23、控制往复摆动模块,以驱动每个所述激光传感器基于所述激光扫描速度同步往复运动;
24、控制每个所述激光传感器发射激光并接收每个所述激光传感器采集到的扫描区域信息;
25、对每个所述扫描区域信息进行处理,以评判电缆外护套缺陷。
26、根据本发明实施例的电缆外护套缺陷检测方法,至少具有如下有益效果:
27、通过根据电缆敷设设备对待测电缆的传输速度以及其他相关参数,以来确定激光传感器在支撑轨道机构内的摆动速度,即激光扫描速度,从而使得往复摆动模块可自适应调整速度,保证待测电缆传输速度与激光扫描速度相匹配,以实现相对而言最大有效扫描区域,从而完成对电缆外护套缺陷的无盲区、无死角识别。除此之外,本发明实施例的方法采用了激光传感器绕电缆圆周自旋转检测方式,使得每一束激光均是垂直入射至电缆外表面,解决了激光倾斜入射至电缆表面的倾角偏差问题,以及曲面边缘的缺陷检测盲区问题。
28、根据本发明的一些实施例,所述根据所述待测电缆输送速度、所述待测电缆外径、所述激光传感器数量及所述激光传感器视场宽度,确定激光扫描速度,由以下数学模型所约束:
29、,
30、其中,表示激光扫描速度,其单位为每单位时间内激光传感器在弧形轨道上移动的单位距离;表示所述待测电缆输送速度;表示所述待测电缆外径;表示所述激光传感器数量;表示所述激光传感器视场宽度。
31、根据本发明的一些实施例,所述电缆外护套缺陷检测系统还包括通讯模块和远程终端;
32、所述电缆外护套缺陷检测方法还包括以下步骤:
33、将每个所述激光传感器采集到的扫描区域信息经所述通讯模块传输至所述远程终端;
34、对每个所述扫描区域信息进行图像化处理,以计算出所述待测电缆的参数化特征信息,所述参数化特征信息用于量化评估电缆外护套缺陷;
35、基于预设的判断参数,对所述参数化特征信息进行比对判断,以确定电缆外护套缺陷种类及严重程度。
36、根据本发明的一些实施例,所述电缆外护套缺陷检测方法还包括以下步骤:
37、根据所述电缆外护套缺陷种类及严重程度,生成对应的警报信号;
38、将所述警报信号经所述远程终端传输至通讯模块,以实现本地预警。
39、根据本发明的第三方面实施例的电缆外护套缺陷检测设备,包括至少一个控制处理器和用于与所述至少一个控制处理器通信连接的存储器;所述存储器存储有可被所述至少一个控制处理器执行的指令,所述指令被所述至少一个控制处理器执行,以使所述至少一个控制处理器能够执行如本发明第一方面实施例任一项所述的电缆外护套缺陷检测方法。
40、根据本发明的第四方面实施例的计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如本发明第一方面实施例任一项所述的数据驱动的电缆外护套缺陷检测方法。
41、可以理解的是,上述第三方面和第四方面与相关技术相比存在的有益效果与上述第一方面与相关技术相比存在的有益效果相同,可以参见上述第一方面中的相关描述,在此不再赘述。
42、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。
- 还没有人留言评论。精彩留言会获得点赞!