本发明属于自动驾驶领域,特别是涉及一种基于多维信息的无人车定位方法、电子设备及介质。
背景技术:
1、随着自动驾驶的发展和应用,无人车定位技术成为实现自主行驶的关键技术之一,准确而稳定的无人车定位是实现安全驾驶和高效导航的基础。传统的定位方法往往依赖于单一传感器或有限的信息源,难以满足城市复杂路网环境下的高精度和高可靠性要求。例如,gps信号在高楼林立的城市街道中可能受到遮挡和多路径干扰,影响定位精度和可靠性。其次,传统的局部感知与地图匹配方法在缺乏地图信息或道路标识不清的情况下容易出现定位误差。此外,无人车的定位精度和实时性对于自主行驶和决策至关重要,然而传统定位方法在这方面仍存在局限。如仅利用点云配准进行定位的纯激光雷达定位方法不仅计算复杂耗时,同时其存储的点云地图在大规模场景下往往对内存的消耗巨大;而仅利用惯性测量单元(imu)或轮速计进行里程计推算的定位方法虽然实时性较好,但其极易受到传感器硬件参数的影响,累计误差往往难以纠正,导致其定位精度不足。
技术实现思路
1、本发明的目的是针对现有技术不足,提供了一种基于多维信息的无人车定位方法、电子设备及介质,融合多种传感器的数据来实现无人车路径匹配和定位,提高了运算速度与效率,减少了传感器产生的误差,提高了无人车定位的准确性和稳定性。
2、为了实现上述目的,本发明所采用的技术方案是:
3、一种基于多维信息的无人车定位方法,包括以下步骤:
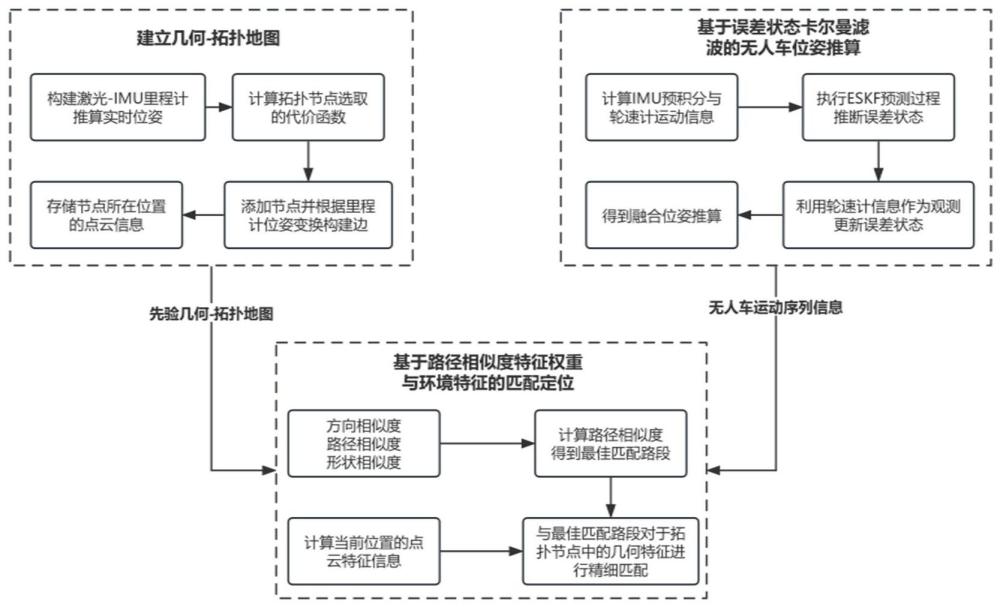
4、s1:根据无人车激光雷达数据与惯性测量单元数据建立基于点云特征的几何-拓扑地图;根据无人车轮速计数据与惯性测量单元数据,采用误差状态卡尔曼滤波方法进行无人车位姿推算,得到无人车位姿运动序列信息;
5、s2:对几何-拓扑地图与无人车位姿运动序列信息进行路径相似度的匹配定位,确定无人车所处的最佳匹配路段;
6、s3:匹配无人车实时点云信息与几何-拓扑地图中和无人车所处的最佳匹配路段对应的几何点云信息,得到无人车精确定位结果。
7、本发明使用无人车激光雷达数据与惯性测量单元数据建立基于点云特征的几何-拓扑地图,几何-拓扑地图可同时发挥拓扑地图运算高效与点云地图特征丰富的优势,在保留几何地图精确性的同时,利用拓扑地图结构降低数据存储量,提高了运算速度与效率;本发明通过误差状态卡尔曼滤波融合惯性测量单元与轮速计的测量信息进行无人车位姿推算,降低了惯性测量单元数据受到漂移与噪声的影响,同时减小了轮速计因打滑和非精确的轮子尺寸所产生的误差,提高了无人车定位精度。
8、进一步地,所述根据无人车激光雷达数据与惯性测量单元数据建立基于点云特征的几何-拓扑地图的具体实现过程包括:
9、a1:将无人车的初始位置作为首个拓扑节点,保存首个拓扑节点的几何点云信息;
10、a2:计算无人车当前位置的几何点云信息与上一个拓扑节点的几何点云信息的差异值,将差异值大于差异阈值的当前位置作为新的拓扑节点,保存新的拓扑节点的几何点云信息;
11、a3:根据无人车激光雷达数据与惯性测量单元数据,推算无人车实时位姿;
12、a4:根据无人车实时位姿,获得相邻两个拓扑节点间的位姿变换,得到相邻两个拓扑节点间的旋转平移矩阵;
13、a5:将拓扑节点的几何点云信息及相邻两个拓扑节点间的旋转平移矩阵存入地图,构建几何-拓扑地图。
14、进一步地,所述计算无人车当前位置的几何点云信息与上一个拓扑节点的几何点云信息的差异值的具体过程包括:
15、(1)计算无人车当前位置的几何点云信息描述子和上一个拓扑节点的几何点云信息描述子之间的余弦相似度dsimilarity;
16、
17、其中iq表示上一个拓扑节点的几何点云信息描述子,ic表示当前位置的几何点云信息描述子,表示上一个拓扑节点的几何点云信息描述子中第j列,表示当前位置的几何点云信息描述子中第j列,ns为描述子矩阵的列数;
18、计算无人车当前位置的世界坐标与上一个拓扑节点的世界坐标的距离差dnode;
19、
20、其中(xi-1,yi-1,zi-1)为上一个拓扑节点的世界坐标,(xi,yi,zi)为当前位置的世界坐标;
21、(2)根据余弦相似度和距离差计算差异值wi;
22、
23、其中w1,w2分别为余弦相似度与距离差的代价权重,dsimth与dnodeth分别为余弦相似度的阈值与距离差的阈值。
24、进一步地,所述根据无人车轮速计数据与惯性测量单元数据,采用误差状态卡尔曼滤波方法进行无人车位姿推算,得到无人车位姿运动序列信息的具体实现过程包括:
25、b1:对惯性测量单元数据进行积分,得到名义状态变量,将惯性测量单元数据的误差部分作为误差状态变量;
26、b2:利用无人车轮速计数据计算卡尔曼增益,利用卡尔曼增益更新误差状态变量;
27、b3:将更新后的误差状态变量放入名义状态变量中,得到无人车位姿运动序列信息。
28、进一步地,步骤s2的具体实现过程包括:
29、c1:通过几何-拓扑地图与无人车位姿运动序列信息计算各候选路段的方向相似度、距离相似度与形状相似度;
30、c2:采用方向相似度、距离相似度与形状相似度累加计算得到各候选路段的路径相似度;
31、c3:选取路径相似度最高的路段作为无人车所处的最佳匹配路段。
32、进一步地,所述方向相似度w1、距离相似度w2、形状相似度w3通过以下公式计算得到:
33、w1=λ1×cosθ
34、
35、
36、
37、其中v1,v2为候选路段的2个节点,v1·px,v1·py分别为v1的横坐标值和纵坐标值,v2·px,v2·py分别为v2的横坐标值和纵坐标值;xk,xk-1分别为无人车当前位置以及上一位置推算出来的位姿,xk·px,xk·py分别为无人车当前位置投影至地面的横坐标值和纵坐标值,xk-1·px,xk-1·py分别为无人车上一位置投影至地面的横坐标值和纵坐标值,λ1为方向相似度的权重,λ2为距离相似度的权重,d为无人车当前位置到候选路段的垂直距离,λ3为形状相似度的权重,lmatch表示无人车当前位置与上一位置分别投影至最近的候选路段上后两个投影点之间的距离,ldis表示无人车当前位置与上一位置之间的距离。
38、基于同一构思,本发明提供了一种电子设备,包括:
39、一个或多个处理器;
40、存储器,其上存储有一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现基于多维信息的无人车定位方法的步骤。
41、基于同一构思,本发明提供了一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现基于多维信息的无人车定位方法的步骤。
42、相比于现有技术,本发明的有益效果:
43、(1)本发明建立了基于点云特征的几何-拓扑地图,几何-拓扑地图可同时发挥拓扑地图运算高效与点云地图特征丰富的优势,在保留几何地图精确性的同时,利用拓扑地图结构降低数据存储量,提高了运算速度与效率;
44、(2)本发明通过误差状态卡尔曼滤波融合惯性测量单元与轮速计的测量信息进行无人车位姿推算,降低了惯性测量单元数据受到漂移与噪声的影响,同时减小了轮速计因打滑和非精确的轮子尺寸所产生的误差,提高了无人车定位精度;
45、(3)本发明不仅利用激光雷达耦合惯性测量单元构建几何-拓扑地图,同时在定位过程不需要激光雷达全程进行匹配计算,仅需与最佳匹配路段的拓扑节点进行精匹配,大大降低了运算量,同时激光雷达参与的精匹配也保证了累计误差与漂移量相较于仅利用轮速计与惯性测量单元融合的方式更低。
46、(4)本发明不需要依赖gnss或rtk基站信息,仅需无人车自身激光雷达、惯性测量单元与轮速计数据即可进行无人车定位,提高了定位的准确性、稳定性与实时性。