一种固定翼无人机无跑道回收航迹规划方法与流程
本发明涉及无人机回收领域,具体地,涉及一种固定翼无人机无跑道回收航迹规划方法。
背景技术:
1、目前针对固定翼无人机无跑道回收的研究多采用撞网、空中抓取等方法,这些方法都很难实现固定翼的安全无损回收,不能实现无人机的无间断多频次作业,具体为:
2、对于在无跑道情况下回收舰载固定翼无人机,主要有伞翼回收、空中钩取和撞网回收等。
3、伞翼回收操作简单,无人机从飞行状态到安全回收,整个过程自动完成,对操作人员要求比较低。伞降回收的主要问题是无人机自带降落伞占用了机身的宝贵空间和载荷能力,而且易受海上天气影响。
4、撞网回收需要在近场高精度导航下,无人机减速并降低高度,最后撞入拦阻网中,并柔和的吸收掉无人机的动能实现安全回收的方式。这种比较理想的精确定点回收方式,拦阻网面积不大需要精确引导,在中小型军舰上布设拦阻网时,由于舰体上方又布满了雷达、导弹、通信天线等设备,加之海上风浪大,舰体摇晃,如果末端引导控制不当,则不能准确入网,甚至可能撞到军舰上,损毁价格昂贵的设备。
5、空中钩取回收是在无人机通过安装在无人机翼尖前缘的翼尖钩和舰上的垂绳回收装置配合完成。无人机由回收导引系统精确引导向回收垂绳飞行,当任意一侧机翼前缘撞上回收绳时,运动惯性将导致飞机绕回收绳旋转,回收绳同时沿机翼前缘由翼根向翼尖滑行,迅速滑入回收钩内并被锁止装置锁定,从而完成对无人机的捕获。这种回收方式对无人机机体以及舰船改动较小,只能回收质量较小的无人机。
6、上述方法都无法实现固定翼无人机的安全、无损和无跑道回收。
技术实现思路
1、本发明目的是实现固定翼无人机的安全、无损和无跑道回收。
2、为实现上述目的,本发明提供了一种固定翼无人机无跑道回收航迹规划方法,所述方法包括:
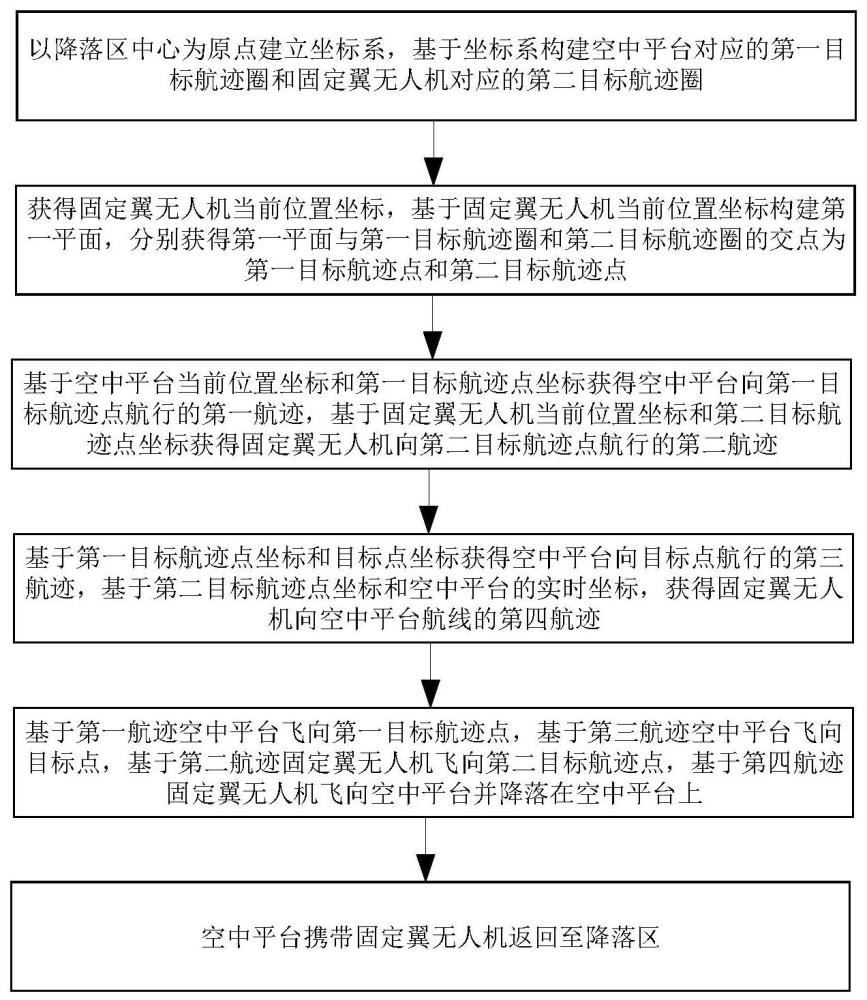
3、步骤1:以降落区中心为原点建立坐标系,基于坐标系构建空中平台对应的第一目标航迹圈和固定翼无人机对应的第二目标航迹圈;
4、步骤2:获得固定翼无人机当前位置坐标,基于固定翼无人机当前位置坐标构建第一平面,分别获得第一平面与第一目标航迹圈和第二目标航迹圈的交点为第一目标航迹点和第二目标航迹点;
5、步骤3:基于空中平台当前位置坐标和第一目标航迹点坐标获得空中平台向第一目标航迹点航行的第一航迹,基于固定翼无人机当前位置坐标和第二目标航迹点坐标获得固定翼无人机向第二目标航迹点航行的第二航迹;
6、步骤4:基于第一目标航迹点坐标和目标点坐标获得空中平台向目标点航行的第三航迹,基于第二目标航迹点坐标和空中平台的实时坐标,获得固定翼无人机向空中平台航线的第四航迹;
7、步骤5:基于第一航迹空中平台飞向第一目标航迹点,基于第三航迹空中平台飞向目标点,基于第二航迹固定翼无人机飞向第二目标航迹点,基于第四航迹固定翼无人机飞向空中平台并降落在空中平台上;
8、步骤6:空中平台携带固定翼无人机返回至降落区。
9、其中,本方法首先基于降落区中心建立坐标系,然后分别计算出空中平台和固定翼无人机的航迹,然后按照计算出的航迹将固定翼无人机飞向空中平台并降落在空中平台上,空中平台携带固定翼无人机返回至降落区,上述固定翼无人机回收方式中使用空中平台实现了无跑道回收,且没有使用撞网、空中抓取等方法,实现了对固定翼无人机的安全和无损回收。
10、在一些实施例中,所述步骤1具体包括:
11、以降落区中心为原点建立坐标系,降落区中心点为o(0,0,0),以o点正上方的坐标为g1(0,0,z1)和g2(0,0,z2)的两点为圆心、半径分别为r1和r2画平行于水平面的圆,分别得到第一目标航迹圈和第二目标航迹圈。其中,航迹设计的最终目标是希望设计成固定翼无人机从空中平台的正后方追上,并从空中平台上方降落到空中平台上,所以设计对应于固定翼无人机的z2>z1和r2>r1,以达到上述目标。
12、在一些实施例中,第一平面的获得方式为:
13、固定翼无人机当前位置坐标为p3(x3,y3,z3),第一平面为同时过点p3(x3,y3,z3)、点o(0,0,0)和点的平面,且第一平面中的点(x,y,z)满足x2+y2+z2≤x32+y32+z32,且x与x3正负号相同,y与y3正负号相同,z∈[0,z3],第一平面为1/4圆平面,通过上述设计保证第一平面所处象限与固定翼在同一象限,这样求出的第一和第二航迹点就是在两个航迹圈上且靠近固定翼无人机的一侧了,这样固定翼无人机离第二航迹点更近,由当前位置飞向第二目标航迹点的距离更近、能耗更低。
14、其中,设计为x与x3正负号相同和y与y3正负号相同,y与y3正负号相同,z∈[0,z3],第一平面为1/4圆平面的目的是:正负号相同再加上z的坐标限制可以保证第一平面所处象限与固定翼无人机所处象限一致,这样求出的第一和第二航迹点就是在两个航迹圈上且靠近固定翼无人机的一侧了,否则由过上述三点确定的无限平面与两个航迹圈还会有另外两个远离固定翼的交点。
15、在一些实施例中,固定翼无人机到达第二目标航迹点的时间晚于空中平台到达第一目标航迹点的时间;空中平台到达第一目标航迹点时空中平台为悬停状态,且空中平台的机头方向指向坐标点(0,0,z1),悬停的目的等待固定翼无人机就位,机头指向该坐标点是保证第三航迹的速度矢量方向不会有大角度的调整;固定翼无人机到达第二目标航迹点时飞行速度高于其失速速度,通常是高于失速速度5%,且固定翼无人机的机头方向指向坐标点(0,0,z2),固定翼无人机的飞行速度一旦低于失速速度,就容易掉高度失去平衡,机头指向该坐标点同样也是为了使第四航迹中速度矢量的方向不会有大的调整,固定翼无人机大范围调整速度矢量方向是不利于平稳航行的。
16、其中,将固定翼无人机到达第二目标航迹点的时间晚于空中平台到达第一目标航迹点的时间的目的为:
17、空中平台到达第一航迹点前、后进行反向运动,空中平台到达第一航迹点以后需要调转机头,空中平台是旋翼飞行器调转机头是比较容易、快速的,固定翼无人机掉头是需要根据自身特性以一定的半径盘旋一周才能做到。而后空中平台悬停(旋翼飞行器才能够悬停)等待固定翼无人机就位。固定翼无人机的第四航迹需要以空中平台为目标,若固定翼无人机先到第二航迹点,固定翼无人机的航行特点导致它不能悬停只能开始盘旋飞行等待空中平台就位;若固定翼无人机到达第二航迹点而空中平台还未就位,就直接开始以空中平台为目标(这个目标不只是位置,空中平台的速度矢量(包括方向)也是目标)规划航迹,空中平台此时的运动方向还和它们最终的运动方向相反,空中平台后续还需要180°掉转机头,固定翼无人机的第四航迹会被规划为一个速度方向需要180°掉转的航迹,这样的航迹对于固定翼无人机这种难掉头的飞行器是很难跟踪上的。
18、在一些实施例中,空中平台由第一目标航迹点以最高动力加速至最高巡航速度,然后保持最高巡航速度匀速飞向目标点,这样设计的目的是固定翼无人机最低速度受限,为使得固定翼无人机能以更高的速度来跟踪空中平台,空中平台就需要尽可能快的加速到其最高巡航速度了,保持匀速是使其飞行状态更为平稳,少波动,使得固定翼无人机更好跟踪。
19、在一些实施例中,步骤5中固定翼无人机和空中平台到达预定目标的判断方式为:
20、固定翼无人机当前位置与目标位置、固定翼无人机当前状态与目标状态间的偏差的绝对值在预设阈值e1范围内,空中平台当前位置与目标位置、空中平台当前状态与目标状态间的偏差的绝对值在预设阈值e2范围内;
21、
22、
23、其中,ex1为固定翼飞行器当前位置与目标位置的x坐标值偏差,ey1为固定翼飞行器当前位置与目标位置的y坐标值偏差,ez1为固定翼飞行器当前位置与目标位置的z坐标值偏差,为固定翼飞行器当前状态与目标状态在x轴方向线速度偏差,为固定翼飞行器当前状态与目标状态在y轴方向线速度偏差,为固定翼飞行器当前状态与目标状态在z轴方向线速度偏差,为固定翼飞行器当前状态与目标状态的偏航角偏差,eθ1为固定翼飞行器当前状态与目标状态的俯仰角偏差,eψ1为固定翼飞行器当前状态与目标状态的滚转角偏差,为固定翼飞行器当前状态与目标状态的偏航角角速度偏差,为固定翼飞行器当前状态与目标状态的俯仰角角速度偏差,为固定翼飞行器当前状态与目标状态的滚转角角速度偏差;
24、ex2为空中平台当前位置与目标位置的x坐标值偏差,ey2为空中平台当前位置与目标位置的y坐标值偏差,ez2为空中平台当前位置与目标位置的z坐标值偏差,为空中平台当前状态与目标状态在x轴方向线速度偏差,为空中平台当前状态与目标状态在y轴方向线速度偏差,为空中平台当前状态与目标状态在z轴方向线速度偏差,为空中平台当前状态与目标状态的偏航角偏差,eθ2为空中平台当前状态与目标状态的俯仰角偏差,eψ2为空中平台当前状态与目标状态的滚转角偏差,为空中平台当前状态与目标状态的偏航角角速度偏差,为空中平台当前状态与目标状态的俯仰角角速度偏差,为空中平台当前状态与目标状态的滚转角角速度偏差。
25、在一些实施例中,所述步骤5还包括判断空中平台与固定翼无人机是否交汇成功,若交汇成功则执行步骤6,否则不执行步骤6。
26、在一些实施例中,空中平台与固定翼无人机交汇成功的判断方式为:
27、在时长t内:固定翼无人机的实时高度方向h1与空中平台的实时高度h2满足关系式:
28、h1=h2+3+ez3;
29、固定翼无人机与空中平台之间的位置和状态偏差的绝对值在阈值e3范围;
30、
31、其中,ex3为固定翼飞行器当前位置与空中平台位置的x坐标值偏差,ey3为固定翼飞行器当前位置与空中平台位置的y坐标值偏差,ez3为固定翼飞行器当前位置与空中平台位置的z坐标值偏差,为固定翼飞行器当前状态与空中平台状态在x轴方向线速度偏差,为固定翼飞行器当前状态与空中平台状态在y轴方向线速度偏差,为固定翼飞行器当前状态与空中平台状态在z轴方向线速度偏差,为固定翼飞行器当前状态与空中平台状态的偏航角偏差,eθ3为固定翼飞行器当前状态与空中平台状态的俯仰角偏差,eψ3为固定翼飞行器当前状态与空中平台状态的滚转角偏差,为固定翼飞行器当前状态与空中平台状态的偏航角角速度偏差,为固定翼飞行器当前状态与空中平台状态的俯仰角角速度偏差,为固定翼飞行器当前状态与空中平台状态的滚转角角速度偏差。
32、在一些实施例中,第一航迹、第二航迹和第四航迹均采用基于滚动窗口的路径规划算法进行路径规划。
33、在一些实施例中,基于滚动窗口的路径规划算法包括:
34、(1)子目标及场景预测:固定翼无人机和空中平台根据其探测到的局部窗口范围内的环境信息,用启发式方法生成局部子目标,并对动态障碍物的运动进行预测,判断固定翼无人机和空中平台是否可能与动态障碍物相碰撞;
35、(2)滚动窗口优化:固定翼无人机和空中平台根据局部窗口内的环境信息及预测结果,确定向子目标行进的局部路径,并实施当前策略;
36、(3)反馈初始化:在新的滚动窗口产生后,根据传感器所获取的最新信息,对新的滚动窗口内的环境及障碍物运动状况进行更新;
37、(4)重复步骤(1)、(2)和(3),直至固定翼无人机和空中平台到达预定目标,结束本阶段航迹规划。
38、本发明提供的一个或多个技术方案,至少具有如下技术效果或优点:
39、充分利用了空中平台能够垂直起降的优势,在降落区域有限(无足够长跑道)的情况下,将空中平台视作固定翼无人机的空中跑道,以实现固定翼无人机的回收,同时充分考虑空中平台能耗高、飞行距离以及最高速度受限的特点,将远距离的航迹划分成两个阶段,最终为固定翼无人机和空中平台的远距离交会提出了切实可行的航迹规划方法。本方法实现了固定翼无人机的安全、无损和无跑道回收。
- 还没有人留言评论。精彩留言会获得点赞!