基于人脸检测功能的酒精浓度快速检测棒监测预警系统的制作方法
本发明属于酒驾监测领域,具体是用于酒精检测的监测预警系统。
背景技术:
1、随着城市化进程的加快和车辆数量的增加,酒驾和疲劳驾驶造成的交通事故频发,导致了严重的人身伤害和财产损失。但传统的酒精浓度快速检测棒存在应用方向单一,不能实时将酒精检测结果上传云端,实现数据一体化的问题;存在传统疲劳驾驶方法具有高计算复杂性和低评估精度的问题;存在传统目标检测方法可读性差,不能分级分步进行人脸识别的问题。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本发明提供了一种基于人脸检测功能的酒精浓度快速检测棒监测预警系统,针对传统酒精浓度快速检测棒存在应用方向单一,不能实时将酒精检测结果上传云端,同一驾驶人多次检测,不便于准确计算执勤民警检查工作量的问题,本方案将酒精浓度快速检测棒和人脸检测功能相结合,避免不必要的重复性检测,提高检查人员的工作效率,实现数据一体化;针对传统疲劳驾驶方法具有高计算复杂性和低评估精度的问题,本方案采用多级自适应3d-cnn模型学习驾驶员的状态,以提高识别疲劳驾驶的性能;针对传统目标检测方法可读性差,不能分级分步进行人脸识别的问题,本方案采用具有非相交联合抑制技术的三阶段模型,带动整体效率。
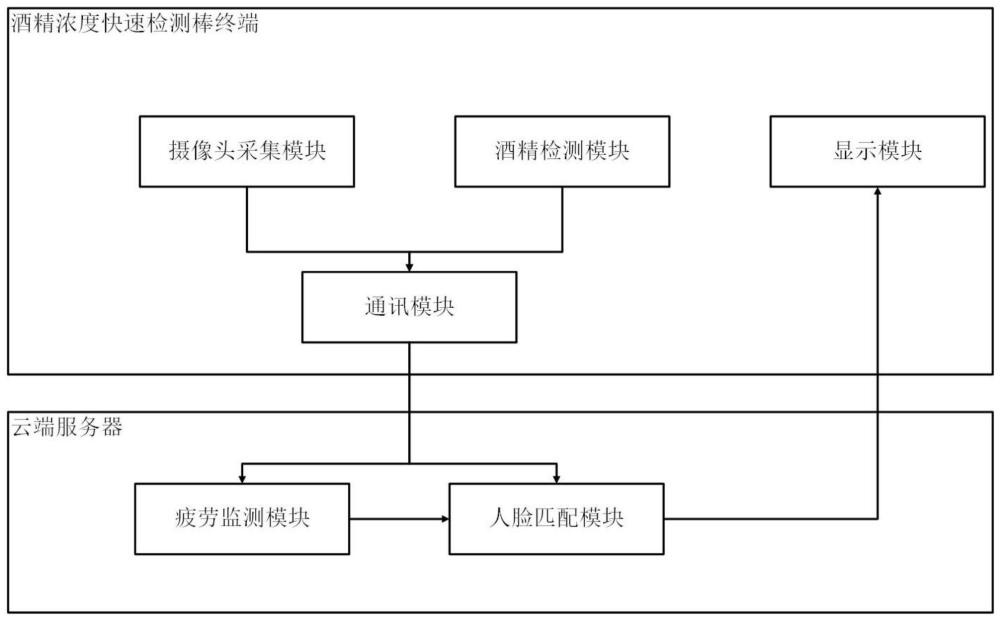
2、本发明提供的一种基于人脸检测功能的酒精浓度快速检测棒监测预警系统,包括酒精浓度快速检测棒终端和云端服务器;所述酒精浓度快速检测棒终端包括摄像头采集模块、酒精检测模块、通讯模块和显示模块;所述云端服务器包括疲劳监测模块和人脸匹配模块,所述摄像头采集模块设有工业摄像头;所述人脸匹配模块设有驾驶员信息数据库;所述驾驶员信息数据库包含基本信息和历史记录;
3、所述摄像头采集模块通过工业摄像头对驾驶员进行图像采集,输出图像帧序列b并传输至通讯模块;
4、所述酒精检测模块检测驾驶员酒精浓度是否超标、是否存在酒驾行为,输出酒驾检测结果并传输至通讯模块;
5、所述通讯模块将酒驾检测结果和图像帧序列b分别传输至疲劳监测模块和人脸匹配模块;
6、所述疲劳监测模块接收来自通讯模块的图像帧序列b,检测驾驶员是否存在疲劳驾驶行为,输出疲劳驾驶结果至人脸匹配模块;
7、所述人脸匹配模块接收来自通讯模块的图像帧序列b,提取人脸特征并进行人脸匹配,将疲劳驾驶结果和酒驾检测结果更新至驾驶员信息数据库,并将驾驶员信息数据库中对应驾驶员的基本信息和历史记录、疲劳驾驶结果和酒驾检测结果,传输至显示模块;
8、所述显示模块接收并显示来自人脸匹配模块的基本信息、历史记录、疲劳驾驶结果和酒驾检测结果。
9、进一步地,所述摄像头采集模块具体包括以下内容:
10、通过工业摄像头采集图像帧序列a;
11、对图像帧序列a进行大小变化,生成不同分辨率的图像高斯金字塔;
12、目标检测,采用2d-cnn作为目标检测阶段的模型,训练并进行二分类判断图像帧序列a是否包含驾驶员的人脸区域,计算目标检测阶段的模型的交叉熵损失函数,公式如下:
13、
14、式中,表示目标检测阶段的模型的交叉熵损失函数,表示预期二分类结果,pi表示图像帧序列a包含人脸区域的概率,
15、回归边界框,分割人脸区域的边界框,采用三阶段架构,以级联方式处理图像高斯金字塔,具体步骤如下:
16、i-net阶段,采用2d-cnn作为i-net阶段的模型,训练并对人脸区域进行回归预测,滤波器大小固定为3x3,输出包含人脸区域位置和尺寸信息的重叠的边界框,计算回归边界框阶段的模型的欧式损失函数,公式如下:
17、
18、式中,表示回归边界框阶段的模型的欧式损失函数,表示实际边界框,表示预期边界框,r4表示四维实数空间,表示l2范数的平方;
19、p-net阶段:通过nious技术对边界框进行校准,采用非极大值抑制处理重叠的边界框,生成合并边界框;
20、o-net阶段:根据合并边界框,定位左眼、右眼、鼻子、嘴左端和嘴右端,得到精确边界框,根据精确边界框裁剪图像帧序列a,输出图像帧序列b;
21、将图像帧序列b传输至疲劳监测模块。
22、进一步地,所述疲劳监测模块具体包括以下内容:
23、时空学习,采用3d-cnn作为时空学习阶段的模型,将图像帧序列b输入3d-cnn,并提取空间时间数据,3d-cnn前向传播公式如下:
24、
25、式中,st表示时间空间数据,表示输出的第i层第j个特征图在宽m行第n列第t时刻的空间时间数据,α表示激活函数,w表示宽度,h表示高度,d表示时间,xabc表示图像帧序列b的第a行第b列第c时刻的元素,表示第i层第j个权重矩阵在xabc的权重系数,表示对xabc和进行3d卷积操作,bij表示第i层第j个偏置项;
26、状态理解,以one-hot编码的形式,记录驾驶员的眼镜状态、眼位状态、打哈欠状态、点头状态和扬眉状态,将眼镜状态定义为ogn,将眼位状态定义为oe,将打哈欠状态定义为om,将点头状态定义为oh,将扬眉状态定义为osc,状态条件数据由ogn、oe、om、oh和osc组成,采用fcnn作为状态理解阶段的模型,提取状态条件数据,使用欧氏距离作为状态理解阶段的模型的损失函数,公式如下:
27、
28、式中,表示状态理解阶段的模型的损失函数,表示预期候选框,r10表示十维实数空间,表示实际候选框,表示l2范数的平方;
29、反向传播,优化三种阶段模型,三种阶段模型包括状态理解阶段的模型、目标检测阶段的模型和状态理解阶段的模型,最小化总损失函数,反向传播的目标函数公式如下:
30、
31、式中,min表示最小化,n表示用于训练三种阶段模型的样本数量,表示用于训练三种阶段模型的所有样本的损失求和,∑j∈{det,box,loc}表示三种阶段模型的损失函数的累积和,δj表示损失类型为j的权重系数,表示确定第i个样本和第j种阶段模型的损失函数是否应该激活的指示器,表示第i个样本和第j种阶段模型的损失函数,表示总损失函数;
32、特征融合,采用fcnn作为特征融合阶段的模型,识别自适应条件特征表示集合,计算公式如下:
33、γ=wfu(wfeast⊙wgnogn⊙whoh⊙wmom⊙weoe⊙wscosc)+bfu;
34、式中,γ表示自适应条件特征表示集合,wfu表示融合权重,bfu表示融合偏置,wfea表示特征权重,⊙表示逐元素相乘,wgn表示ogn的关联参数,wh表示oh的关联参数,wm表示om的关联参数,we表示oe的关联参数,wsc表示osc的关联参数;
35、疲劳检测,采用fcnn作为疲劳检测阶段的模型,计算条件特征簇,公式如下:
36、
37、式中,vi表示第i个条件特征簇,γj是自适应条件特征表示集合的第j个元素,exp()表示指数运算,∑jexp(γj)表示所有exp(γj)的累积和;
38、使用条件特征簇进行疲劳检测,公式如下:
39、rdetect=lmdetect(v,θdetect);
40、式中,rdetect表示判断驾驶员是否疲倦的结果,lmdetect()表示疲劳检测阶段的模型,v表示条件特征簇,θdetect表示疲劳检测阶段的模型的参数。
41、采用上述方案本发明取得的有益效果如下:
42、(1)针对传统酒精浓度快速检测棒存在应用方向单一,不能实时将酒精检测结果上传云端,同一驾驶人多次检测,数据重复、冗余,不便于准确计算执勤民警检查工作量的问题,本方案将酒精浓度快速检测棒和人脸检测功能相结合,在检测酒驾的同时,监测驾驶员是否存在疲劳驾驶,并将检测结果同步至服务器,通过人脸识别的方法将本次检测的结果与该驾驶员的历史数据一一对应,实现自动上传和数据更新的功能,避免不必要的重复性检测,提高检查人员的工作效率,实现数据一体化;
43、(2)针对传统疲劳驾驶方法具有高计算复杂性和低评估精度的问题,本方案引入时间维度,充分利用连续图像帧包含的视频动态信息,采用多级自适应3d-cnn模型学习驾驶员的状态,以提高识别疲劳驾驶的性能;
44、(3)针对传统目标检测方法可读性差,不能分级分步进行人脸识别的问题,本方案采用具有非相交联合抑制技术的三阶段模型,i-net、p-net和o-net三个阶段进行驾驶员人脸区域的目标检测,提高检测的灵活性,带动整体效率。
- 还没有人留言评论。精彩留言会获得点赞!