用于井下马头门巷道的形变检测方法及系统与流程
本发明属于煤矿巷道形变监测,涉及进行马头门巷道的形变监测,尤其涉及一种用于井下马头门巷道的形变检测方法及系统。
背景技术:
1、马头门是井底车场巷道与立井井筒连接的过渡段,是矿井的关键部位,使用时间长,其特点为断面大、交通咽喉巷道多、应力场叠加,如果支护不当,容易发生巷道形变。巷道形变是指巷道岩层在外力因素作用下会产生形状和尺寸变化,会导致井下交通中断、生产设备损坏、人员伤亡等事故,严重威胁煤矿正常生产。马头门巷道形变的检测可通过人工巡检、三维激光扫描等方法。但人工巡检存在精度低、效率低、作业强度大的缺点;三维激光扫描法存在设备价格昂贵、井下环境复杂导致仪器精度降低等缺点。
2、目前,马头门巷道形变监测技术分为接触式检测法和非接触式检测法。
3、其中接触式检测法也可分为人工测量和压力测量法。十字测量法是人工测量的常用方法,需要人工进行大量测量记录关键数据,但是井下巷道多,测量点多,使得作业强度大,效率低;此外,马头门空间大,需要登高作业,因此作业人员承担的作业风险大,受作业人员疲劳度和心理压力影响,测量精度无法保证。压力测量法需要将检测板与巷道顶板接触安装,当发生形变时,检测到压力变化,发出形变报警,该测量法需要进行前期安装,工作量大;而且安装检测板有可能影响到支护结构、使巷道变窄,影响生产安全;此外由于巷道情况复杂,多粉尘、湿度大,有可能导致传感器失效。
4、非接触式检测法可分为激光雷达测量法和计算机视觉法。激光雷达测量法是以激光雷达为距离测量传感器,通过安装多个传感器以获取巷道形变数据,由于激光雷达价格昂贵,使得该方法成本高;并且激光雷达数据依赖高精度测量仪器,容易受粉尘和高湿度影响,会导致精度下降甚至失效,稳定性较差。计算机视觉法主要利用计算机视觉技术实现巷道形变监测,然而巷道的图像特征随着使用场景变化而变化,监测方法常常需要重新设计,泛化能力差,同时现有计算机视觉技术主要是基于二维图像监测图像像素距离,然后估算出真实物理距离,误差较大。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种用于井下马头门巷道的形变检测方法及系统,通过主动式双目立体视觉技术,基于双目立体视觉系统的三维图像对马头门巷道形变进行监测,实现低成本无接触式的马头门巷道形变监测。
2、为达到上述目的,本发明一方面提出一种用于井下马头门巷道的形变检测方法,该方法通过双目立体视觉设备采集马头门巷道中特征点标识板的图像,再采用图像处理算法提取出图像中的特征点,计算各特征点的物理坐标并根据物理坐标计算特征点之间的距离,从而得到马头门巷道的形变量。
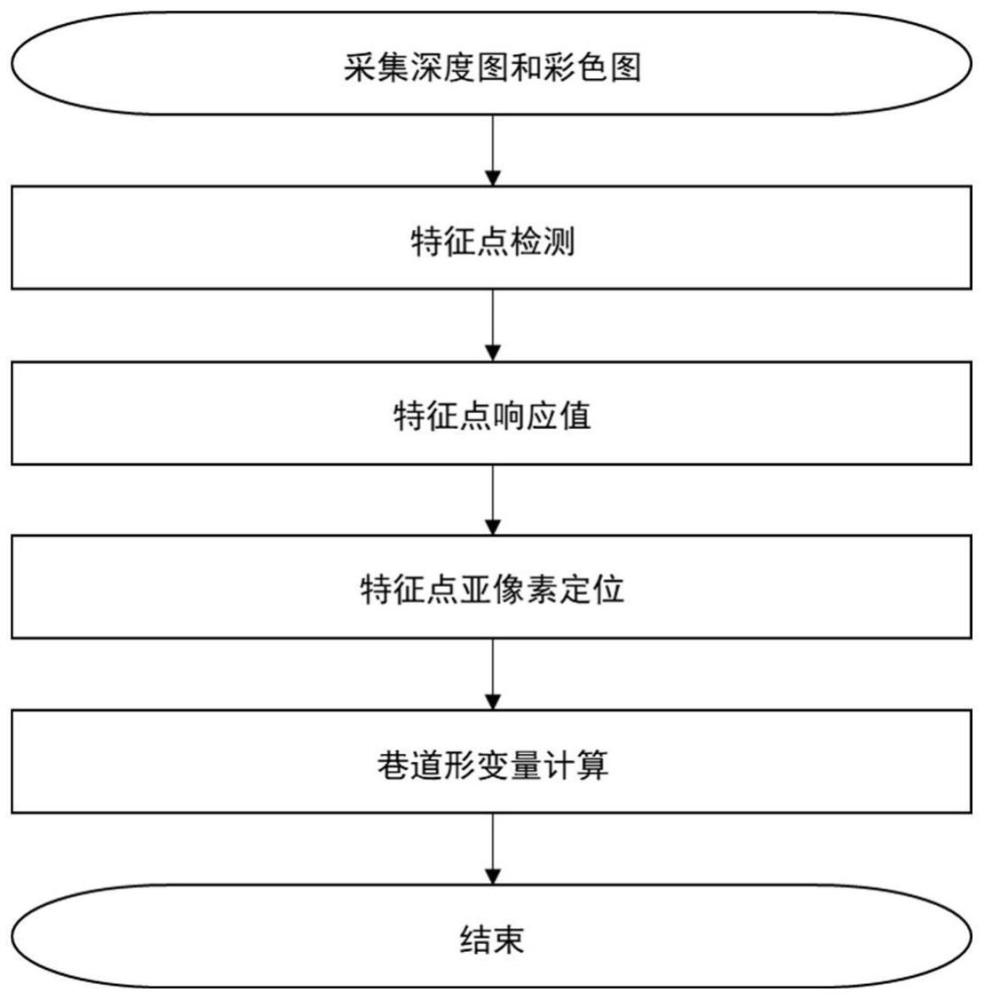
3、其中,所述的图像处理算法包括以下步骤:
4、s1、将所述双目立体视觉设备采集的彩色图像转换为灰度图并进行特征点检测,然后输出特征点的坐标;
5、s2、查找每一个特征点的邻域坐标,并基于邻域坐标计算各个特征点的特征点响应值;
6、s3、对特征点响应值进行降序排列,按照顺序选取与所有特征点标识板中特征点数量对应个数的特征点响应值,将与这些特征点响应值对应的特征点作为关键特征点;
7、s4、对所述关键特征点进行亚像素定位,结合关键特征点的亚像素坐标计算各关键特征点的物理坐标,从而计算得到各关键特征点之间的物理距离以表征马头门巷道的形变量。
8、进一步的,所述特征点标识板安装在马头门巷道的左、右帮以及顶板和底板处,具体地,在马头门巷道的腰线与马头门巷道左帮和右帮的交点处各安装一特征点标识板,在马头门巷道的中垂线与马头门巷道的顶板和底板的交点处各安装一特征点标识板。其中,每一个所述特征点标识板中只有一个特征点。
9、进一步的,步骤s2中,邻域坐标表示为:
10、
11、式中,r表示特征点p到其邻域坐标的像素长度,α表示夹角,xk和yk表示特征点p的图像坐标,k=0,1,2,…,n-1;
12、则特征点响应值为:
13、
14、式中,g(·)表示灰度图图像矩阵。
15、进一步的,步骤s4中,关键特征点的物理坐标通过双线性插值计算:
16、
17、式中,pmm表示关键特征点的物理坐标,c=0,1,2分别表示像素相对于红外坐标系的x、y、z坐标,表示向下取整,表示向上取整,xsp和ysp表示关键特征点的亚像素坐标,l(·)表示点云图张量。
18、其中,关键特征点与特征点标识板的特征点相对应,则计算关键特征点之间的物理距离即得到各特征点标识板的特征点之间的距离,其中特征点标识板在马头门巷道的左帮、右帮、顶板和底板处各安装了一个,则各特征点标识板中特征点间的物理距离即能够表征马头门巷道左帮和右帮的移近量以及顶板和底板的移近量。
19、进一步的,马头门巷道的左帮、右帮、顶板和底板处的特征点标识板中特征点的物理坐标表示为:
20、
21、式中,amm、bmm、cmm和dmm分别表示马头门巷道左帮、右帮、顶板和底板处特征点标识板中特征点的物理坐标;
22、则马头门巷道的两帮移近量和顶底板移近量分别表示为:
23、
24、取两帮特征点连线和顶底板特征点连线的交点为另一特征点o;
25、则马头门巷道的左帮移近量和右帮移近量分别表示为:
26、
27、式中,oab表示与amm和bmm共面的点o的坐标,oab=diag(amm-bmm)*x+amm,其中x=[t tt]t,x通过下式求解:
28、[(amm-bmm)×(cmm-dmm)×(cmm-dmm)]t*[diag(amm-bmm)*x+amm-cmm]=0
29、马头门巷道的顶板下沉量和底鼓量分别表示为:
30、
31、式中,ocd表示与cmm和dmm共面的点o的坐标,ocd=diag(cmm-dmm)*x+cmm,其中x通过下式求解:
32、[(amm-bmm)×(cmm-dmm)×(amm-bmm)]t*[diag(cmm-dmm)*x+cmm-amm]=0
33、式中,“×”表示向量积,“*”表示矩阵乘积;diag(·)表示将向量构造为对角方阵。
34、本发明另一方面提供了一种用于井下马头门巷道的形变检测系统,该系统包括双目立体视觉子系统和图像处理子系统,其中双目立体视觉子系统用于采集马头门巷道两帮以及顶底板处安装的特征点标识板的图像,图像处理子系统用于处理双目立体视觉子系统采集的图像数据,以计算出马头门巷道左帮和右帮的移近量以及顶板和底板的移近量。
35、双目立体视觉子系统包括深度处理器,以及分别与深度处理器连接的投影仪、红外相机和彩色相机,深度处理器还与图像处理子系统连接。其中深度处理器用于根据投影仪、红外相机和彩色相机采集的图像数据计算出深度图。
36、本发明的有益效果在于:本发明通过双目立体视觉设备采集马头门巷道的三维图像和点云数据,并根据三维图像和点云数据计算马头门巷道的形变量,可得到精准的形变量数据,为防止巷道形变过大导致煤矿安全事故提供了预先预警能力。同时,本发明通过双目立体视觉设备和嵌入式边缘计算设备可实现无接触、无人化、全天候的巷道形变监测,设备结构简单、成本低,能够大大减轻工作人员的工作量。
37、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!