一种面向高铁钢轨的线结构光轮廓测量方法
本发明涉及线结构光轮廓测量,更具体地说,本发明涉及一种面向高铁钢轨的线结构光轮廓测量方法。
背景技术:
1、面向高铁钢轨的线结构光轮廓测量技术的核心包含两个部分:线结构光测量技术与钢轨轮廓测量技术。线结构光测量技术是基于三角测量原理的一种方法,用于获取被测试物体的轮廓信息,能够较为准确的还原钢轨轮廓从而掌握钢轨的服役状态,是铁路运营维护的重要手段。与传统的接触式轮廓测量技术相比,线结构光测量技术具有高速、非接触和无损等优势,在轮廓测量、表面检测、三维测量领域得到广泛应用。
2、近年来,国内非接触式钢轨轮廓检测技术取得了长足进步,在机器视觉中多激光摄像头传感器的配准和测量方面取得了进一步的研究和改进。詹东等分别研究了钢轨全断面剖面测量过程中动态条件下的车身振动补偿、轮廓匹配和参数测量方法,激光相机传感器用于轨道内外侧的图像采集和轮廓配准,并提出了一种基于正交分解的振动补偿方法;王浩基于视觉成像同源异构词,提出了一种线结构光标定位方法,以及一种基于深度学习算法的高精度激光条纹中心线提取方法;鲍亚军等利用4个激光传感器建立了钢轨在静态和动态条件下全轮廓的测量模型。而上述的所有工作,都没有对双线结构光光平面重合度、垂直度的进行展开,或者仅仅是从机械结构方面来保证,没有对光平面重合度、垂直度的评估,因此系统存在着较大的隐患,为了解决上述问题,现提供一种技术方案。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明提供一种面向高铁钢轨的线结构光轮廓测量方法,基于激光三角测量技术,搭建线结构光单目轮廓测量系统,实现物体轮廓提取,通过线结构光单目轮廓测量系统构建线结构光双目轮廓测量系统,提取完整的截面轮廓,在提取过程中,能够评估光平面的重合度以及垂直度,从而为校准光平面提供参考,并且建立垂直参考平面向其投影轮廓点云的方式提升轮廓提取的精度,从而更为精确地测量钢轨轮廓数据,对铁路运营维护工作有指导意义,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种面向高铁钢轨的线结构光轮廓测量方法,包括如下步骤:
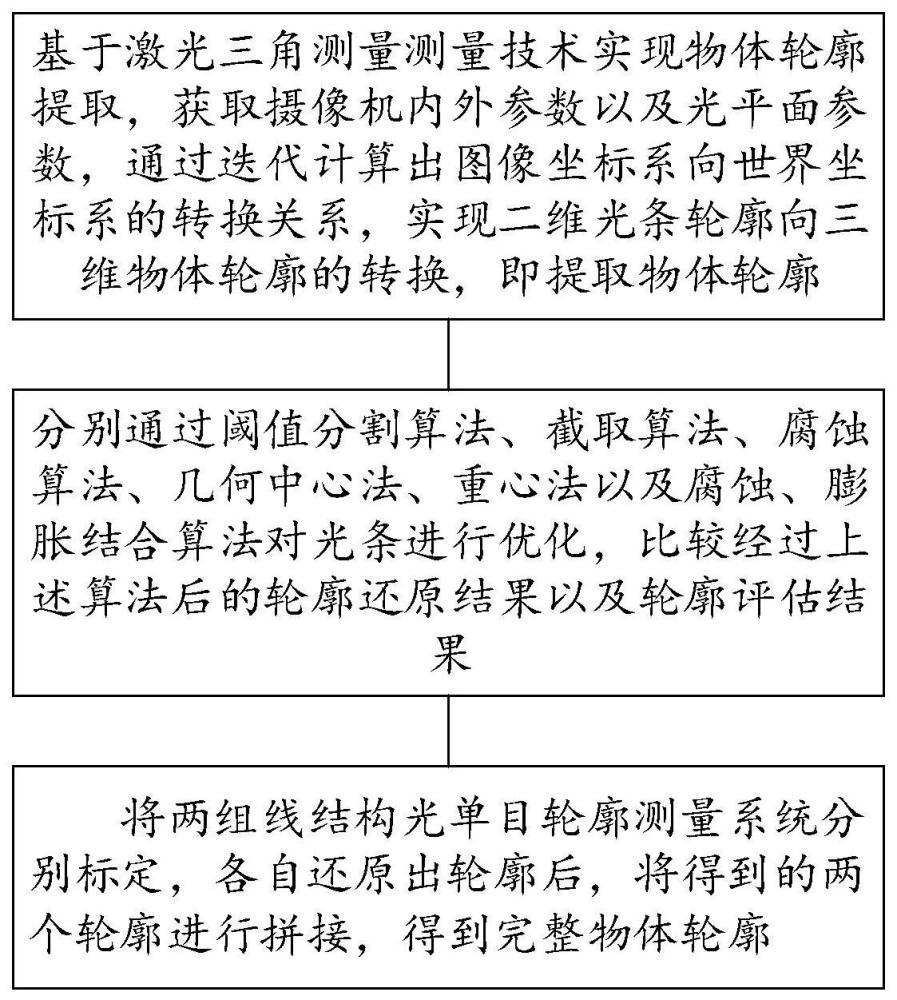
4、步骤一,构建线结构光单目轮廓测量系统:基于激光三角测量技术实现物体轮廓提取,获取摄像机内外参数以及光平面参数,通过迭代计算出图像坐标系向世界坐标系的转换关系,实现二维光条轮廓向三维物体轮廓的转换,即提取物体轮廓;
5、步骤二,探索光条优化算法:分别通过阈值分割算法、截取算法、腐蚀算法、几何中心法、重心法以及腐蚀、膨胀结合算法对光条进行优化,比较经过上述算法后的轮廓还原结果以及轮廓评估结果;
6、步骤三,搭建双线结构光双目轮廓测量系统:将两组线结构光单目轮廓测量系统分别标定,各自还原出轮廓后,将得到的两个轮廓进行拼接,得到完整物体轮廓。
7、作为本发明进一步的方案,线结构光单目轮廓测量系统提取物体轮廓的步骤为:
8、步骤q1,摄像机参数标定:拍摄不同位姿的halcon标定板的图片,提取halcon标定板特征点的坐标,使用halcon程序迭代计算摄像机参数,并返回误差;
9、步骤q2,光平面参数标定:提取halcon标定板的位姿,打开线激光器拍摄交线,提取交线的halcon标定板位姿的坐标,根据标定板位姿的两交线的坐标拟合出基标定板的光平面,并获得光平面参数以及误差;
10、步骤q3,轮廓提取:将halcon标定板的位姿设定为世界坐标系,综合摄像机参数标定和光平面参数标定,打开线激光器投射激光光条到待测物上,使用摄像机拍摄待测物体轮廓光条图片,将物体轮廓光条图片还原为物体轮廓。
11、作为本发明进一步的方案,使用halcon程序迭代计算摄像机参数,其中,进行迭代计算的公式为:
12、
13、式中:j(θ)为迭代的目标函数,n为标定板上检测到的特征点的数量,(u′,v′)为实际拍摄的标定板的特征点坐标,(u,v)为标定板特征点的理想图像坐标。
14、作为本发明进一步的方案,轮廓提取过程中摄像机以及线激光器的位置不能改变,否则会导致标定参数错误,导致待测物体轮廓光条图片错误。
15、摄像机参数标定是为了获得摄像机的内外参数,包括焦距、主点、畸变系数、旋转矩阵和平移向量,摄像机参数标定的结果用于将摄像机采集到的图像数据映射到物体的实际世界坐标系中,从而实现图像中物体的尺寸和位置的测量;光平面参数标定是为了获取光平面的相关参数,包括光平面的法向量和原点坐标,光平面是通过拟合标定板的两条交线的平面,能够用来描述激光光线在世界坐标系中的位置和方向,光平面参数标定的结果用于将光条在图像中的像素坐标映射到世界坐标系中,从而将图像中的轮廓点映射到实际世界坐标系中的位置。摄像机参数标定和光平面参数标定是为了建立图像像素坐标与世界坐标系之间的映射关系,这些映射关系用于准确提取物体轮廓,便于将图像中的点映射到物体的真实尺寸和位置上,轮廓提取则是利用这些映射关系将光条的像素坐标转换为物体轮廓点的坐标,从而实现轮廓的准确提取。
16、作为本发明的进一步方案,步骤三搭建双线结构光双目轮廓测量系统,将两组线结构光单目轮廓测量系统分别标定,各自还原出轮廓后,将得到的两个轮廓进行拼接,得到完整物体轮廓,两个轮廓表示有两个光平面,将两个光平面调至重合位置,且光平面垂直于物体法向且垂直于地面,得到完整物体轮廓。
17、作为本发明的进一步方案,将两个光平面调至重合位置,评估两个光平面的重合度,提取两个光平面的位姿,计算两个光平面的距离以及法向量,再计算两个法向量的夹角,来评估两个光平面的重合度,当光平面的距离以及法向量的夹角小于所设置的阈值时,认为两个光平面重合;当光平面的距离以及法向量的夹角大于等于所设置的阈值时,两个光平面重将重新进行调整。
18、作为本发明的进一步方案,光平面垂直于物体法向且垂直于地面,评估光平面的垂直度,使用尺子作为辅助使得光平面垂直于物体的法向,建立一个垂直于地面的参考平面,计算参考平面与光平面的距离和夹角来判断两者的垂直度,当参考平面与光平面的距离和夹角小于所设置的阈值时,光平面垂直于地面;当参考平面与光平面的距离和夹角大于等于所设置的阈值时,光平面不垂直于地面,且重新调整。
19、作为本发明的进一步方案,将两组线结构光单目轮廓测量系统分别标定,各自还原出轮廓后,将得到的两个轮廓进行拼接,将两个轮廓进行拼接的步骤为:
20、步骤w1,构建坐标系:由xc,yc,zc轴构成第一摄像机坐标系,由xc′,yc′,zc′轴构成第二坐标系,由xw,yw,zw轴构成世界坐标系;
21、步骤w2,坐标系转换:世界坐标系向第一摄像机坐标系的转换通过变换矩阵h实现,即:
22、
23、世界坐标系向第二摄像机坐标系的转换通过变换矩阵h′来实现,即:
24、
25、第二摄像机坐标系向第一摄像机坐标系的转换为:
26、
27、在两个线结构光单目轮廓测量系统进行轮廓还原时,将两个轮廓直接转换到同一个世界坐标系中,此时两个线结构光单目轮廓测量系统还原出来的轮廓自动地在同一个参考坐标系下的同一平面内,即实现了轮廓的自动拼接。
28、作为本发明的进一步方案,通过截取法对光条进行优化的操作步骤为,将在非均匀光条件下,待测物体轮廓光条图片散射反射强的部分裁剪掉,再进行轮廓还原;
29、通过腐蚀算法对光条进行优化,其中,腐蚀算法为:当a和b为z2的两个集合,b对a的腐蚀定义为集合腐蚀就是结构元b绕区域a边缘的擦除,腐蚀的结果是为细化图像,能够去除测物体轮廓光条图片中的噪点;
30、中心像素提取算法对光条进行优化,通过计算物体轮廓光条图片中粗光条的中心像素从而将光条细化,在计算的过程中识别产生误差的噪点,从而有效地提高光条质量;
31、腐蚀、膨胀算法结合对光条进行优化,修复腐蚀过度的物体轮廓光条图片,使光条更加均匀。
32、本发明一种面向高铁钢轨的线结构光轮廓测量方法的技术效果和优点:基于激光三角测量技术,搭建线结构光单目轮廓测量系统,实现物体轮廓提取,通过线结构光单目轮廓测量系统构建线结构光双目轮廓测量系统,提取完整的截面轮廓,在提取过程中,能够评估光平面的重合度以及垂直度,从而为校准光平面提供参考,并且建立垂直参考平面向其投影轮廓点云的方式提升轮廓提取的精度,从而更为精确地测量钢轨轮廓数据,对铁路运营维护工作有指导意义。
- 还没有人留言评论。精彩留言会获得点赞!