车道级定位方法和装置、智能设备以及存储介质与流程
本公开涉及车辆定位,并且更具体地涉及一种车道级定位方法、车道级定位装置、实施该方法的智能设备以及实施该方法的计算机可读存储介质。
背景技术:
1、车辆在导航或智能驾驶等场景下,需要准确知道车辆在道路中所处的车道,以便于对用户进行提示或进行行驶规划。目前,主要利用全球定位系统(global positioningsystem,gps)配合高精(high definition,hd)地图来实现车辆的车道级定位。这种方法在开阔地区表现良好,但在城区,尤其是高楼林立的地区存在定位不准确的问题。此外,部分自动驾驶系统利用激光雷达等高精度传感器来提升定位精度,然而,在复杂的城市环境中,实时感知和静态hd地图常常不一致,而且静态hd地图也存在鲜度不足的问题,这给在hd地图上做车道级定位带来了挑战。
2、要说明的是,在上述背景技术部分公开的信息仅用于加强对本公开的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、为了解决或至少缓解以上问题中的一个或多个,提供了以下技术方案。本公开的实施例提供了一种车道级定位方法、车道级定位装置、实施该方法的智能设备以及实施该方法的计算机可读存储介质,其能够提升在复杂城市交通环境中的车道定位的准确性和可靠性,从而为车辆提供更高精度的导航和更安全的行车保障。
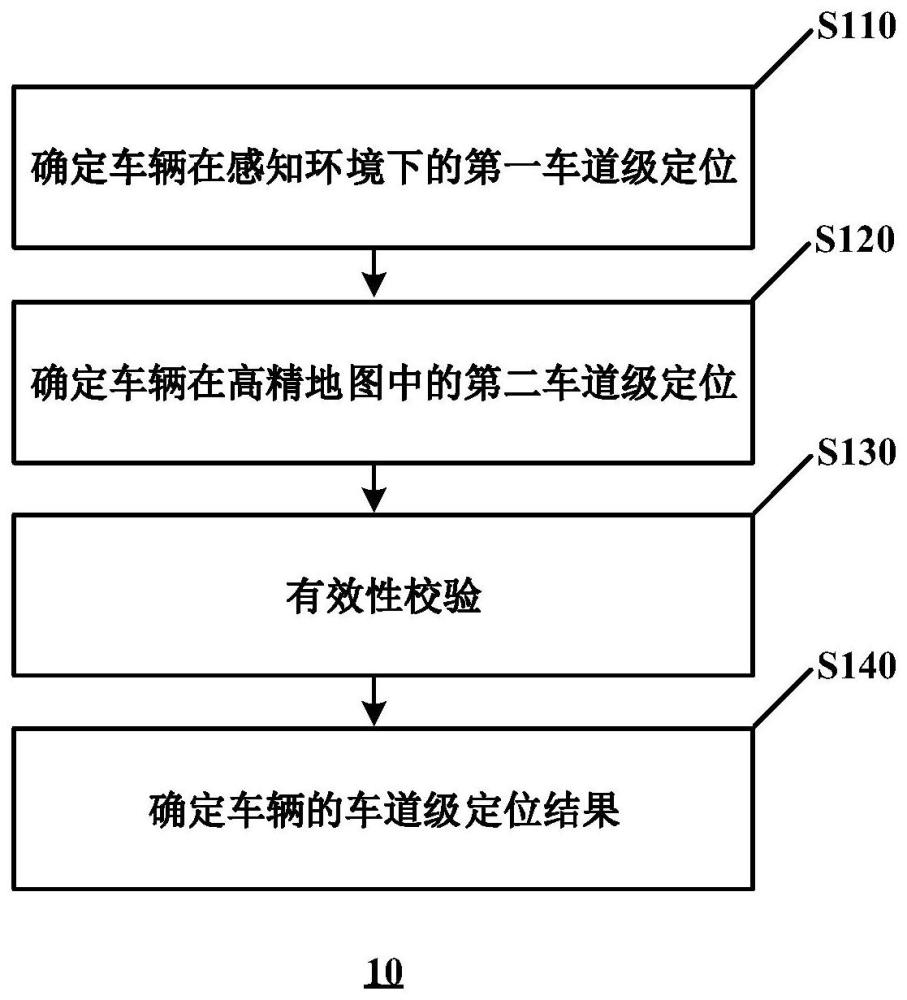
2、按照本公开的第一方面,提供一种车道级定位方法,所述方法包括以下步骤:a、基于车辆感知信息和标精地图信息,确定车辆在感知环境下的第一车道级定位;b、利用融合定位技术,确定所述车辆在高精地图中的第二车道级定位;c、基于所述车辆感知信息和所述标精地图信息对高精地图信息进行有效性校验;以及d、根据所述有效性校验的结果,基于所述第一车道级定位和/或所述第二车道级定位来确定所述车辆的车道级定位结果。
3、作为以上方案的替代或补充,在根据本公开一实施例的车道级定位方法中,步骤a包括:基于所述车辆的车载传感器采集到的信息生成感知车道线信息、路面标志信息、动态流量信息以及静态占用信息;以及将所述感知车道线信息、所述路面标志信息、所述动态流量信息、所述静态占用信息以及所述标精地图信息输入至道路边界推理模型,利用所述道路边界推理模型确定所述车辆所处道路的可行驶边界信息。
4、作为以上方案的替代或补充,在根据本公开一实施例的车道级定位方法中,利用所述道路边界推理模型确定所述车辆所处道路的可行驶边界信息包括:利用所述道路边界推理模型输出所述车辆所处道路中的各车道的车道边界信息和车道类型信息;以及基于所述各车道的车道边界信息和车道类型信息,确定所述车辆所处道路的可行驶边界信息。
5、作为以上方案的替代或补充,在根据本公开一实施例的车道级定位方法中,基于所述车辆的车载传感器采集到的信息生成感知车道线信息、路面标志信息、动态流量信息以及静态占用信息包括:将所述车载传感器采集到的信息输入至鸟瞰视角网络,利用所述鸟瞰视角网络确定所述感知车道线信息、所述路面标志信息、所述动态流量信息以及所述静态占用信息,其中,所述感知车道线信息包括感知车道线的几何特征、线型和颜色,所述动态流量信息包括动态感知对象的分类、速度和位置,所述静态占用信息包括静态感知对象的占用信息。
6、作为以上方案的替代或补充,在根据本公开一实施例的车道级定位方法中,步骤a还包括:基于所述车辆所处道路的可行驶边界信息以及所述车辆感知信息,确定指示所述车辆所处的车道位置的第一车道级定位。
7、作为以上方案的替代或补充,在根据本公开一实施例的车道级定位方法中,所述方法还包括:若所述车辆感知信息指示感知车道线边界不清晰和/或几何特征不完整,则在基于导航地图输出的标精地图信息确定车辆换道或车道数量发生变化时,重新确定所述第一车道级定位。
8、作为以上方案的替代或补充,在根据本公开一实施例的车道级定位方法中,步骤b包括:基于导航信息和车辆惯性测量信息确定车辆位置信息;以及基于所述车辆位置信息和高精地图信息,利用地图匹配确定所述车辆在高精地图中的第二车道级定位。
9、作为以上方案的替代或补充,在根据本公开一实施例的车道级定位方法中,步骤c包括:基于所述车辆感知信息,确定所述车辆在所述感知环境下所处道路中车道的第一数量;基于车辆位置信息和所述标精地图信息,确定所述车辆在标精地图中所处道路中车道的第二数量;基于车辆位置信息和所述高精地图信息,确定所述车辆在高精地图中所处道路中车道的第三数量;以及若所述第一数量和所述第二数量的加权和与所述第三数量之间的相似度大于或等于第一阈值,则所述有效性校验通过。
10、作为以上方案的替代或补充,在根据本公开一实施例的车道级定位方法中,步骤c包括:基于所述车辆感知信息,确定所述车辆在感知环境下所处道路的第一路面标识;基于车辆位置信息和所述标精地图信息,确定所述车辆的转向信息;基于车辆位置信息和所述高精地图信息,确定所述车辆在高精地图中所处道路的第二路面标识;以及若所述第一路面标识或转向信息与所述第二路面标识相匹配,则所述有效性校验通过。
11、作为以上方案的替代或补充,在根据本公开一实施例的车道级定位方法中,步骤c包括:确定所述车辆在高精地图中所处道路的各车道的车道边界信息与感知环境下所处道路的各车道的车道边界信息的相似度;以及若车道边界信息的相似度大于或等于第二阈值,则所述有效性校验通过。作为以上方案的替代或补充,在根据本公开一实施例的车道级定位方法中,
12、作为以上方案的替代或补充,在根据本公开一实施例的车道级定位方法中,步骤d包括:若所述有效性校验通过,则将所述第二车道级定位确定为所述车辆的车道级定位结果。
13、作为以上方案的替代或补充,在根据本公开一实施例的车道级定位方法中,步骤d包括:若所述校验不通过,则利用所述第一车道级定位对融合定位结果进行修正以获得修正后的第二车道级定位,并将所述修正后的第二车道级定位确定为所述车辆的车道级定位结果;或若所述校验不通过,则将所述第一车道级定位确定为所述车辆的车道级定位结果。
14、根据本公开的第二方面,提供一种车道级定位装置,包含:存储器;处理器;以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序的运行使得根据本公开第一方面所述的车道级定位方法中的任意一项被执行。
15、根据本公开的第三方面,提供一种智能设备,该智能设备具备根据本公开第二方面所述的车道级定位装置。
16、根据本公开的第四方面,提供一种计算机存储介质,所述计算机存储介质包括指令,所述指令在运行时执行根据本公开第一方面所述的车道级定位方法中的任意一项。
17、根据本公开的一个或多个实施例的车道级定位方案能够利用传感器采集的车辆感知信息以及导航地图提供的标精地图信息对高精地图信息进行有效性校验,并根据校验结果确定最终定位。该方案通过融合多源信息和多源信息之间的相互验证,提升了在复杂城市交通环境中的车道定位的准确性和可靠性,解决了城区因高精地图鲜度不足或gps信号不准导致的定位不准的问题,从而为用户提供更高精度的导航和更安全的行车保障。
- 还没有人留言评论。精彩留言会获得点赞!