目标运动速度监测方法、装置、计算机设备和存储介质与流程
本技术涉及数据处理,特别是涉及一种目标运动速度监测方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、在安防或边防领域,通常需要采用监测设备对目标场景进行视频、红外或雷达等监控,以实时监测目标场景中的目标对象(人、车等)。在某些场景下,还需要对目标场景中的目标对象进行运动速度监测,以便用于超速判定或运动轨迹预测等处理。
技术实现思路
1、本技术提供了一种目标运动速度监测方法、装置、计算机设备、计算机可读存储介质和计算机程序产品,特别适用于包含斜坡的监控场景,且成本低、实时性强、应用范围广。
2、第一方面,本技术提供了一种目标运动速度监测方法。所述方法包括:
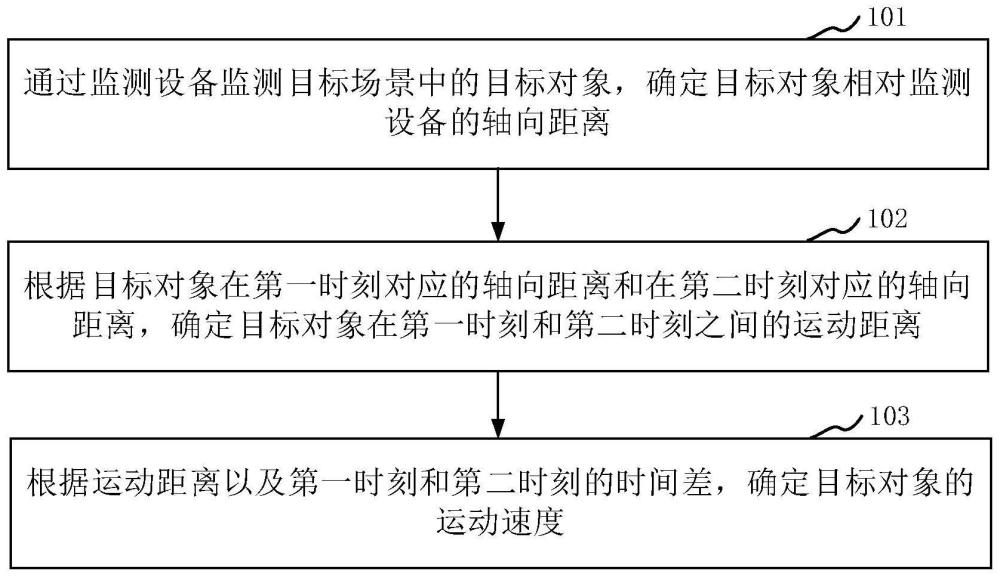
3、通过监测设备监测目标场景中的目标对象,确定所述目标对象相对所述监测设备的轴向距离;所述目标场景包含斜坡;所述轴向距离包括第一轴向距离ltx、第二轴向距离lty和第三轴向距离ltz,分别用于反映所述目标对象相对所述监测设备的垂直距离、水平距离和高程差;
4、根据所述目标对象在第一时刻对应的所述轴向距离和在第二时刻对应的所述轴向距离,确定所述目标对象在所述第一时刻和所述第二时刻之间的运动距离;
5、根据所述运动距离以及所述第一时刻和所述第二时刻的时间差,确定所述目标对象的运动速度。
6、在其中一个实施例中,所述根据所述目标对象在第一时刻对应的所述轴向距离和在第二时刻对应的所述轴向距离,确定所述目标对象在所述第一时刻和所述第二时刻之间的运动距离,包括:
7、获取所述目标对象在第一时刻相对所述监测设备的第一轴向距离ltx1、第二轴向距离lty1和第三轴向距离ltz1,以及所述目标对象在第二时刻相对所述监测设备的第一轴向距离ltx2、第二轴向距离lty2和第三轴向距离ltz2;
8、采用第一公式计算所述目标对象在所述第一时刻和所述第二时刻之间的运动距离lt;
9、所述第一公式为:
10、在其中一个实施例中,所述监测设备为摄像机;所述通过监测设备监测目标场景中的目标对象,确定所述目标对象相对所述监测设备的轴向距离,包括:
11、获取摄像机拍摄目标场景的监控视频图像,识别所述监控视频图像中包含的目标对象,得到所述目标对象在所述监控视频图像中的图像位置信息;
12、根据所述图像位置信息和所述摄像机的感光元件的尺寸信息,确定所述目标对象在所述感光元件中的成像位置信息;
13、根据所述摄像机的视场角、垂直方位角和所述目标对象在所述感光元件中的成像位置信息,确定所述目标对象相对所述摄像机的垂面投影线夹角γv和水平面投影线夹角γh;
14、根据所述垂面投影线夹角γv、所述水平面投影线夹角γh、所述摄像机的安装高度hc、所述斜坡的坡度δ、所述斜坡与所述摄像机的距离l0,确定所述目标对象相对所述摄像机的第一轴向距离ltx、第二轴向距离lty和第三轴向距离ltz。
15、在其中一个实施例中,所述根据所述垂面投影线夹角γv、所述水平面投影线夹角γh、所述摄像机的安装高度hc、所述斜坡的坡度δ、所述斜坡与所述摄像机的距离l0,确定所述目标对象相对所述摄像机的第一轴向距离ltx、第二轴向距离lty和第三轴向距离ltz,包括:
16、根据所述垂面投影线夹角γv、所述摄像机的安装高度hc、所述斜坡的坡度δ、所述斜坡与所述摄像机的距离l0,确定所述目标对象相对所述摄像机的第一轴向距离ltx;
17、根据所述第一轴向距离ltx和所述水平面投影线夹角γh,确定所述目标对象相对所述摄像机的第二轴向距离lty;
18、根据所述第一轴向距离ltx和所述垂面投影线夹角γv,确定所述目标对象相对所述摄像机的第三轴向距离ltz。
19、在其中一个实施例中,所述根据所述垂面投影线夹角γv、所述摄像机的安装高度hc、所述斜坡的坡度δ、所述斜坡与所述摄像机的距离l0,确定所述目标对象相对所述摄像机的第一轴向距离ltx,包括:
20、若所述垂面投影线夹角γv小于90°,计算所述垂面投影线夹角γv的正切值tanγv和所述摄像机的安装高度hc的乘积;
21、在所述乘积大于所述斜坡与所述摄像机的距离l0、或所述垂面投影线夹角γv不小于90°的情况下,根据所述垂面投影线夹角γv、所述摄像机的安装高度hc、所述斜坡的坡度δ、所述斜坡与所述摄像机的距离l0,确定所述目标对象相对所述摄像机的第一轴向距离ltx。
22、在其中一个实施例中,所述根据所述垂面投影线夹角γv、所述摄像机的安装高度hc、所述斜坡的坡度δ、所述斜坡与所述摄像机的距离l0,确定所述目标对象相对所述摄像机的第一轴向距离ltx,包括:
23、在所述乘积大于所述斜坡与所述摄像机的距离l0、或所述垂面投影线夹角γv不小于90°的情况下,采用第二公式计算所述目标对象相对所述摄像机的第一轴向距离ltx;
24、所述第二公式为:
25、在其中一个实施例中,所述方法还包括:
26、在所述乘积不大于所述斜坡与所述摄像机的距离l0的情况下,将所述乘积的值确定为所述目标对象相对所述摄像机的第一轴向距离ltx的值。
27、第二方面,本技术还提供了一种目标运动速度监测装置。所述装置包括:
28、第一确定模块,用于通过监测设备监测目标场景中的目标对象,确定所述目标对象相对所述监测设备的轴向距离;所述目标场景包含斜坡;所述轴向距离包括第一轴向距离ltx、第二轴向距离lty和第三轴向距离ltz,分别用于反映所述目标对象相对所述监测设备的垂直距离、水平距离和高程差;
29、第二确定模块,用于根据所述目标对象在第一时刻对应的所述轴向距离和在第二时刻对应的所述轴向距离,确定所述目标对象在所述第一时刻和所述第二时刻之间的运动距离;
30、第三确定模块,用于根据所述运动距离以及所述第一时刻和所述第二时刻的时间差,确定所述目标对象的运动速度。
31、第三方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现第一方面所述的方法的步骤。
32、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现第一方面所述的方法的步骤。
33、第五方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现第一方面所述的方法的步骤。
34、上述目标运动速度监测方法、装置、计算机设备、存储介质和计算机程序产品,通过监测设备监测目标场景中的目标对象,确定所述目标对象相对所述监测设备的轴向距离,轴向距离包括第一轴向距离ltx、第二轴向距离lty和第三轴向距离ltz,分别用于反映目标对象相对监测设备的垂直距离、水平距离和高程差,进而可以根据目标对象在不同时刻的轴向距离确定两个时刻之间的运动距离,从而可以根据运动距离和时间差计算运动速度。由此,可以实现基于现有的监测设备确定目标对象的运动速度,具有成本可控、实时性强、应用范围广的效果。
- 还没有人留言评论。精彩留言会获得点赞!