本发明涉及车载导航,具体而言,涉及一种车载导航误差标定方法、装置、车载定位设备和存储介质。
背景技术:
1、为了能够结合高精度地图实现精准地导航和路线规划,自动驾驶车辆都会配备高精度的组合导航定位系统。组合导航定位系统通常由全球导航卫星系统(globalnavigation satellite system,简称:gnss)和惯性测量单元(inertial measurementunit,简称:imu)和里程计组成。通过gnss接收卫星信号进行全局定位,通过imu和里程计实现校准,并在gnss信号丢失时继续维持一定时间精度的定位能力。
2、里程计是基于车辆的运动信息通过积分测量车辆的相对位移或者运动。然而里程计存在累积误差,随着时间的推移,这些误差可能导致位置漂移。为了解决这个问题,需要对里程计的误差进行标定和补偿。目前,常见的标定方法包括设定已知路标点标定法和基于运动学非完整约束标定法。
3、其中,设定已知路标点标定法存在要求车辆尽量沿直线行驶、高程变化尽量小等条件限制。由于对标定路线有特殊要求,以及对标定场地限制比较多,实际使用过程中存在很多不便。基于运动学非完整约束标定法使用加速度之差和速度之差作为滤波器观测,该标定算法中里程计误差参数估计值收敛速度较慢,标定时间长,难以满足快速机动的载车要求。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种车载导航误差标定方法、装置、车载定位设备和存储介质,能够有效提高标定效率和准确率。
2、为了实现上述目的,本发明实施例采用的技术方案如下:
3、第一方面,本发明提供一种车载导航误差标定方法,应用于车载定位设备,所述车载定位设备包括imu和gnss接收机;所述方法包括:
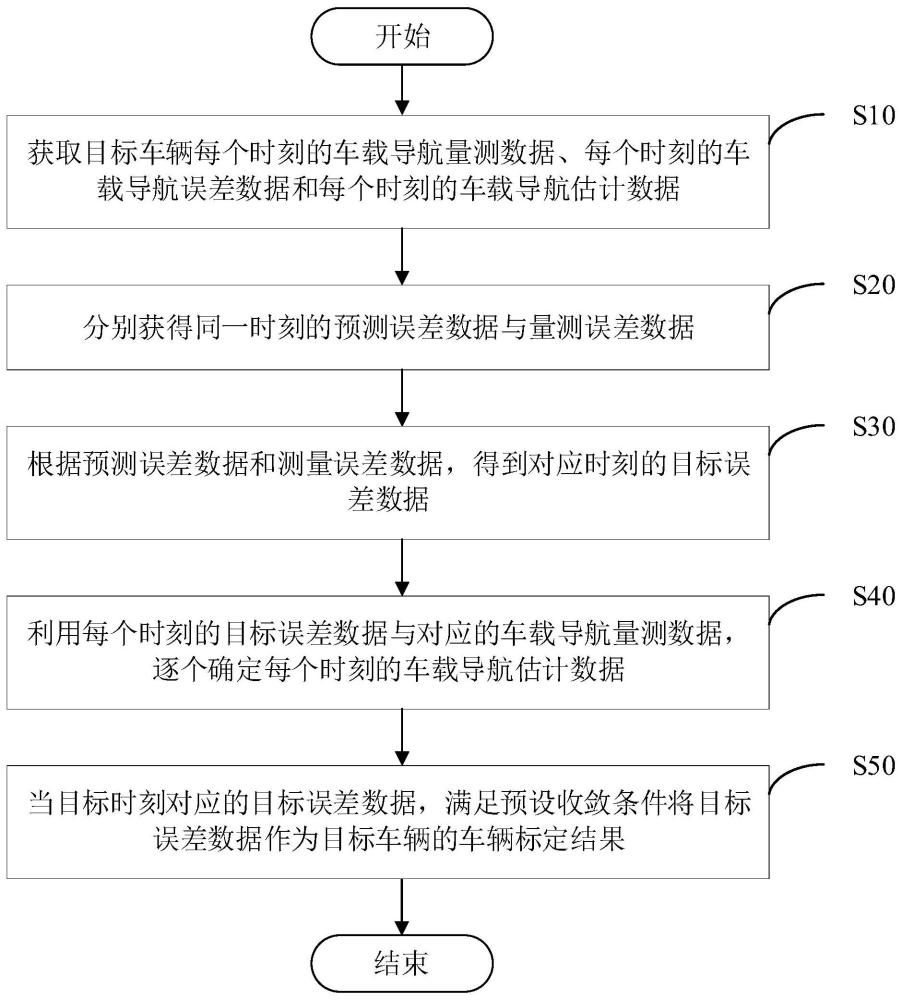
4、获取目标车辆每个时刻的车载导航量测数据、每个时刻的车载导航误差数据和每个时刻的车载导航估计数据;所述车载导航量测数据包括gnss数据、imu数据、车辆运行数据和车辆结构数据;所述车载导航误差数据表征所述目标车辆的导航、空间结构及运动状态产生的误差;
5、分别获得同一时刻的预测误差数据与量测误差数据;所述预测误差数据用于表征相邻时刻的车载导航估计数据之间的预测误差;所述量测误差数据用于表征任一时刻的车载导航量测数据与相邻时刻的车辆导航估计数据之间的误差;
6、根据所述预测误差数据和所述量测误差数据,得到对应时刻的目标误差数据;
7、利用每个时刻的目标误差数据与对应的车载导航量测数据,逐个确定每个时刻的车载导航估计数据;
8、当目标时刻对应的目标误差数据,满足预设收敛条件将所述目标误差数据作为所述目标车辆的车辆标定结果。
9、在可选的实施方式中,第m时刻为目标时刻,n-1时刻为n时刻的上一时刻,所述n小于等于所述m;获得所述预测误差数据的步骤,包括:
10、根据所述n-1时刻的车载导航估计数据构建状态转移矩阵;
11、利用所述n-1时刻的车载导航误差数据和所述状态转移矩阵,按照预先构建的所述目标车辆的状态方程,得到n时刻的预测误差数据。
12、在可选的实施方式中,所述车载导航估计数据包括惯性坐标系的速度估计值、惯性坐标系的纬度估计值、惯性坐标系的高度估计值和车辆运动坐标系的纬度估计值;所述根据所述n-1时刻的车载导航估计数据构建状态转移矩阵的步骤,包括:
13、根据所述n-1时刻的惯性坐标系的速度估计值、惯性坐标系的纬度估计值、惯性坐标系的高度估计值和车辆运动坐标系的纬度估计值和地球自转角速度,得到所述状态转移矩阵。
14、在可选的实施方式中,第m时刻为目标时刻,n-1时刻为n时刻的上一时刻,所述n小于等于所述m;获得所述量测误差数据的步骤,包括:
15、根据预设约束条件、所述n-1时刻的车载导航估计数据和所述n时刻的车载导航量测数据,得到量测向量;
16、根据所述n-1时刻的车载导航估计数据和所述n时刻的车载导航量测数据,得到量测矩阵;
17、利用所述量测矩阵和所述量测向量,按照预先构建的所述目标车辆的观测方程,得到所述n时刻的量测误差数据。
18、在可选的实施方式中,所述车载导航估计数据包括坐标变换矩阵估计值、惯性坐标系的速度估计值、惯性坐标系的角速度估计值、车辆后轮坐标系的后轮中心杆臂估计值、车辆后轮坐标系的后轮轮距估计值和后轮轮速系数估计值;所述车辆运行数据包括目标车辆的后轮轮速;所述根据预设约束条件、所述n-1时刻的车载导航估计数据和所述n时刻的车载导航量测数据,得到量测向量的步骤,包括:
19、根据所述n-1时刻的坐标变换矩阵估计值、惯性坐标系的速度估计值、惯性坐标系的角速度估计值、车辆后轮坐标系的后轮中心杆臂估计值和车辆后轮坐标系的后轮轮距估计值,得到第一量测向量;
20、根据所述n时刻的后轮轮速和所述n-1时刻的后轮轮速系数估计值,得到第二量测向量;
21、根据所述预设约束条件、所述第一量测向量和所述第二量测向量,确定所述量测向量。
22、在可选的实施方式中,所述车载导航估计数据包括坐标变换矩阵估计值、惯性坐标系的速度估计值、车辆后轮坐标系的后轮中心杆臂估计值、车辆后轮坐标系的后轮轮距估计值、惯性坐标系的角速度估计值和后轮轮速系数估计值;所述车辆运行数据包括目标车辆的后轮轮速;所述根据所述n-1时刻的车载导航估计数据和所述n时刻的车载导航量测数据,得到量测矩阵的步骤,包括:
23、根据所述n-1时刻的坐标变换矩阵估计值、惯性坐标系的速度估计值、后轮中心杆臂估计值、车辆后轮坐标系的后轮轮距估计值、惯性坐标系的角速度估计值和车辆后轮坐标系的后轮轮速系数估计值,以及所述n时刻的后轮轮速,得到所述量测矩阵。
24、在可选的实施方式中,所述利用每个时刻的目标误差数据与对应的车载导航量测数据,逐个确定每个时刻的车载导航估计数据的步骤,包括:
25、根据每个时刻的目标误差数据和对应的车载导航量测数据,逐个得到每个时刻的修正后车载导航量测数据;
26、根据每个时刻的修正后车载导航量测数据进行卡尔曼滤波,得到对应的车载导航估计数据。
27、第二方面,本发明提供一种车载导航误差标定装置,应用于车载定位设备,所述车载定位设备包括imu和gnss接收机;所述装置包括:
28、获取模块,用于获取目标车辆每个时刻的车载导航量测数据、每个时刻的车载导航误差数据和每个时刻的车载导航估计数据;所述车载导航量测数据包括gnss数据、imu数据、车辆运行数据和车辆结构数据;所述车载导航误差数据表征所述目标车辆的导航、空间结构及运动状态产生的误差;
29、标定模块,用于分别获得同一时刻的预测误差数据与量测误差数据;所述预测误差数据用于表征相邻时刻的车载导航估计数据之间的预测误差;所述量测误差数据用于表征任一时刻的车载导航量测数据与相邻时刻的车辆导航估计数据之间的误差;根据所述预测误差数据和所述量测误差数据,得到对应时刻的目标误差数据;利用每个时刻的目标误差数据与对应的车载导航量测数据,逐个确定每个时刻的车载导航估计数据;
30、确定模块,用于当目标时刻对应的目标误差数据,满足预设收敛条件将所述目标误差数据作为所述目标车辆的车辆标定结果。
31、第三方面,本发明提供一种车载定位设备,所述车载定位设备包括imu、gnss接收机、存储器和处理器,所述imu用于量测imu数据,所述gnss接收机用于接收gnss数据,所述存储器用于存储计算机程序,所述处理器用于在调用所述计算机程序时执行如前述实施方式任一项所述的车载导航误差标定方法。
32、第四方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如前述实施方式任一项所述的车载导航误差标定方法。
33、相比于现有技术,本发明实施例提供的车载导航误差标定方法、装置、车载定位设备和存储介质,该方法不仅对目标车辆的导航误差进行标定,还对目标车辆的空间结构及运动状态产生的误差进行标定。在车载导航误差标定过程中,根据车载导航的预测误差数据和量测误差数据快速标定各时刻的车载导航误差数据,从而加快标定的收敛速度,提高标定和准确率。
34、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。