一种基于波束的飞行器导航实现方法及系统与流程
本发明涉及飞行器导航,尤其涉及一种基于波束的飞行器导航实现方法及系统。
背景技术:
1、低空空域通常是指正下方地面垂直距离在1000米以内的空域。低空飞行存在多种飞行器,如工业无人机、货运无人机以及evtol,载人小型机等,低空经济是以低空空域为依托,以各种飞行器为牵引,辐射带动相关领域融合发展的综合经济形态。飞行器的位置信息是控制和定位飞行器的最基本的信息。一般来说,飞行器的高度信息可通过超声波传感器或气压计测量,水平位置信息可由集成在飞行器的gps/gnss系统来确定。现有技术还可以通过集成摄像头来完成定位过程,但摄像头的作用距离近,作用距离约20米,容易受到环境和光线的影响,如在雨雪天气、傍晚或阴天、或镜头被树叶遮挡时,性能恶化严重。
2、现有技术最常用的是基于卫星gps/gnss的定位。即飞行器集成gps/gnss模块,当同时搜到至少4颗卫星时,可进行飞行器的水平位置、高度信息,甚至时间误差的计算。但在低空城市场景,卫星信号可能会被周边高楼、树木、隧道等物体遮挡,导致卫星定位失效。卫星的星历误差、卫星钟差、信号在卫星中的处理延迟、卫星天线相位中心偏差、传播层误差等也会导致卫星定位精度的下降。现有技术中可使能高精度定位的卫星技术称为实时动态差分技术,即地面安装位置已知的基准站,将上述卫星误差、传播路径误差计算出后通过已有的通信网络,如4g基站、5g基站发送给飞行器终端,从而提高飞行器的定位精度。较好的rtk定位精度可达到厘米级到分米级。但是rtk定位技术还存在以下问题:一是在低空城市场景,由于楼宇遮挡,导致飞行器无法看到足够数量>=4颗卫星,导致定位失效;二是近地多径严重,导致信号非直线传输,引起较大的定位误差;rtk定位受环境影响大,如电离层活动受太阳影响,会导致定位性能的恶化。
3、基于无线的定位技术还有uwb、蓝牙、rfid等定位技术,但这些技术存在以下问题:额外部署支持uwb、蓝牙或rfid的基站和标签,额外增加了网络部署成本;定位距离仅米级到20米,但典型的低空覆盖距离为50米~200米;这些技术需要基于tdoa或rtt等时延定位技术,需要可见的头端或基站数量至少是3~4个。如果头端或基站数量不够,无法完成定位。
技术实现思路
1、为了解决上述技术问题,本发明实施例提供了一种基于波束的飞行器导航实现方法,通过利用已有的基站,在不额外增加网络设备的前提下,对飞行器进行高精度定位导航,提高了导航准确性。
2、本发明实施例的第一方面提供了一种基于波束的飞行器导航实现方法,所述方法包括:
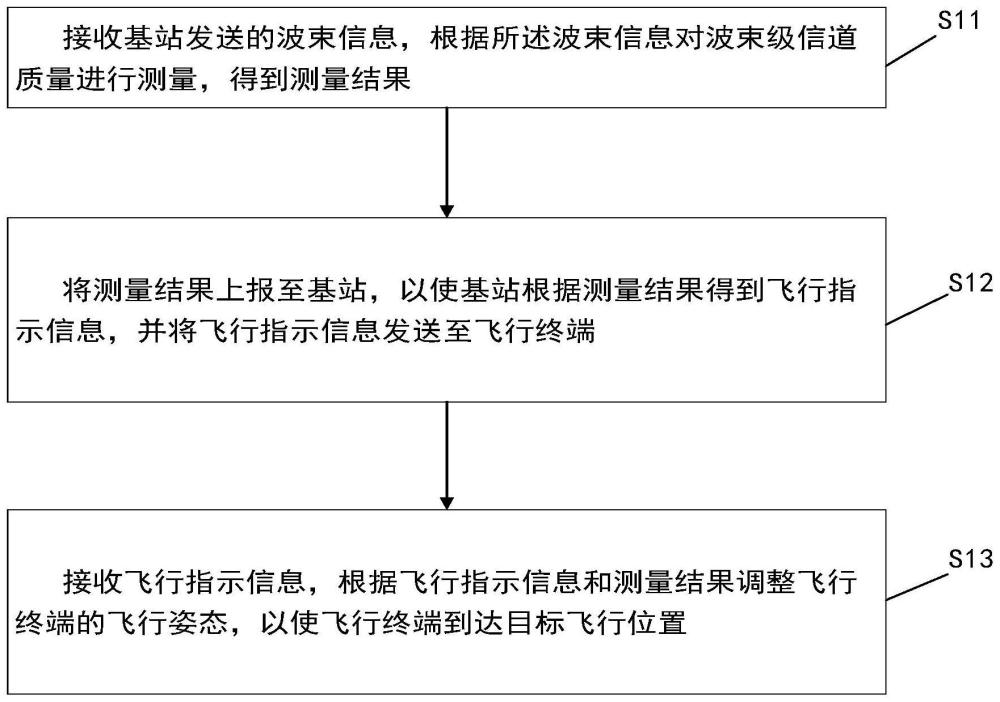
3、接收基站发送的波束信息,根据波束信息对波束级信道质量进行测量,得到测量结果;
4、将测量结果上报至基站,以使基站根据测量结果得到飞行指示信息,并将飞行指示信息发送至飞行终端;
5、接收飞行指示信息,根据飞行指示信息和测量结果调整飞行终端的飞行姿态,以使飞行终端到达目标飞行位置。
6、在第一方面的一种可能的实现方式中,根据波束信息对波束级信道质量进行测量,得到测量结果,具体为:
7、接收基站发送的波束级测量集合和波束级测量门限,根据波束级测量集合和波束级测量门限进行测量,得到波束测量结果,其中,波束级测量集合通过根据波束模板与飞行终端的目标飞行位置得到的;
8、或接收基站发送的信号来波角度信息,根据来波角度测量信息进行来波角度测量,得到来波角度测量结果;
9、或接收基站发送的信道质量测量配置信息,根据信道质量测量配置信息进行信道质量测量,得到信道质量测量结果。
10、在第一方面的一种可能的实现方式中,接收基站发送的信号来波角度信息,根据来波角度测量信息进行来波角度测量,得到来波角度测量结果,具体为:
11、接收基站通过空口信令发送的波束id、rsrp和差表格和rsrp角度表格,利用rsrp和差表格和rsrp角度表格进行查表得到来波角度测量结果;
12、或接收基站发送的信号来波角度信息,测量各个波束的rsrp,根据相邻两波束之间的rsrp的和以及相邻两波束之间的rsrp的差得到飞行终端的来波角度测量结果。
13、在第一方面的一种可能的实现方式中,将测量结果上报至基站,以使基站根据测量结果得到飞行指示信息,具体为:
14、将波束测量结果上报至基站,使基站根据波束测量结果,得到飞行终端的波束移动策略;
15、或将来波角度测量结果上报至基站,使基站根据来波角度测量结果,得到飞行终端的来波角度策略;
16、或将信道质量测量结果上报至基站,使基站根据信道质量测量结果计算飞行器的目标移动距离和目标方向,得到导航信息。
17、在第一方面的一种可能的实现方式中,根据飞行指示信息调整飞行终端的飞行姿态,具体为:
18、接收基站发送的波束移动策略,根据波束移动策略调整飞行终端的飞行姿态;
19、或接收基站发送的来波角度策略,根据来波角度策略调整飞行终端的飞行姿态;
20、或接收基站发送的导航信息,根据导航信息调整飞行终端的飞行姿态。
21、在第一方面的一种可能的实现方式中,根据来波角度策略调整飞行终端的飞行姿态,具体为:
22、根据来波角度策略计算得到目标来波角度,将目标来波角度与预设角度进行比较,计算出移动方向,根据移动方向调整飞行终端的飞行姿态;
23、或根据来波角度策略计算得到目标来波角度,将目标来波角度与预设角度进行比较,计算出移动方向和移动距离,根据移动方向和移动距离调整飞行终端的飞行姿态。
24、本发明实施例的第二方面提供了一种基于波束的飞行器导航实现系统,系统包括:
25、测量模块,用于接收基站发送的波束信息,根据波束信息对波束级信道质量进行测量,得到测量结果;
26、计算模块,用于将测量结果上报至基站,以使基站根据测量结果得到飞行指示信息,并将飞行指示信息发送至飞行终端;
27、调整模块,用于接收飞行指示信息,根据飞行指示信息和测量结果调整飞行终端的飞行姿态,以使飞行终端到达目标飞行位置。
28、在第二方面的一种可能的实现方式中,根据波束信息对波束级信道质量进行测量,得到测量结果,具体为:
29、接收基站发送的波束级测量集合和波束级测量门限,根据波束级测量集合和波束级测量门限进行测量,得到波束测量结果,其中,波束级测量集合通过根据波束模板与飞行终端的目标飞行位置得到的;
30、或接收基站发送的信号来波角度信息,根据信号来波角度信息进行来波角度测量,得到来波角度测量结果;
31、或接收基站发送的信道质量测量配置信息,根据信道质量测量配置信息进行信道质量测量,得到信道质量测量结果。
32、在第二方面的一种可能的实现方式中,接收基站发送的信号来波角度信息,根据来波角度测量信息进行来波角度测量,得到来波角度测量结果,具体为:
33、接收基站通过空口信令发送的波束id、rsrp和差表格和rsrp角度表格,利用rsrp和差表格和rsrp角度表格进行查表得到来波角度测量结果;
34、或接收基站发送的信号来波角度信息,测量各个波束的rsrp,根据相邻两波束之间的rsrp的和以及相邻两波束之间的rsrp的差得到飞行终端的来波角度测量结果。
35、在第二方面的一种可能的实现方式中,将测量结果上报至基站,以使基站根据测量结果得到飞行指示信息,具体为:
36、将波束测量结果上报至基站,使基站根据波束测量结果,得到飞行终端的波束移动策略;
37、或将来波角度测量结果上报至基站,使基站根据来波角度测量结果,得到飞行终端的来波角度策略;
38、或将信道质量测量结果上报至基站,使基站根据信道质量测量结果计算飞行器的目标移动距离和目标方向,得到导航信息。
- 还没有人留言评论。精彩留言会获得点赞!