一种机械平衡自适应测试方法与流程
本发明涉及平衡测试,尤其涉及一种机械平衡自适应测试方法。
背景技术:
1、近年来,随着互联网+被广泛应用于工业、服务等领域,各种机械自动化平台及机械自动化设备被广泛使用,在进行机械自动化处理过程中,对机械平衡进行平衡调整成为重点调整内容。
2、现有的机械平衡自动化调整一般采用模型数据库中模型对设备进行平衡调整。
3、然而,使用现有模型进行平衡调整会产生较大误差,同时整个过程耗时较长,对平衡自适应测试结果较慢,从而影响设备工作效率。
技术实现思路
1、本发明提供一种机械平衡自适应测试方法,用以通过对目标设备在不同平衡自适应调整时刻对应的图像进行分析,可以使得对机械平衡自适应结果测试更加准确,提高目标设备的工作效率。
2、本发明提供一种机械平衡自适应测试方法,包括:
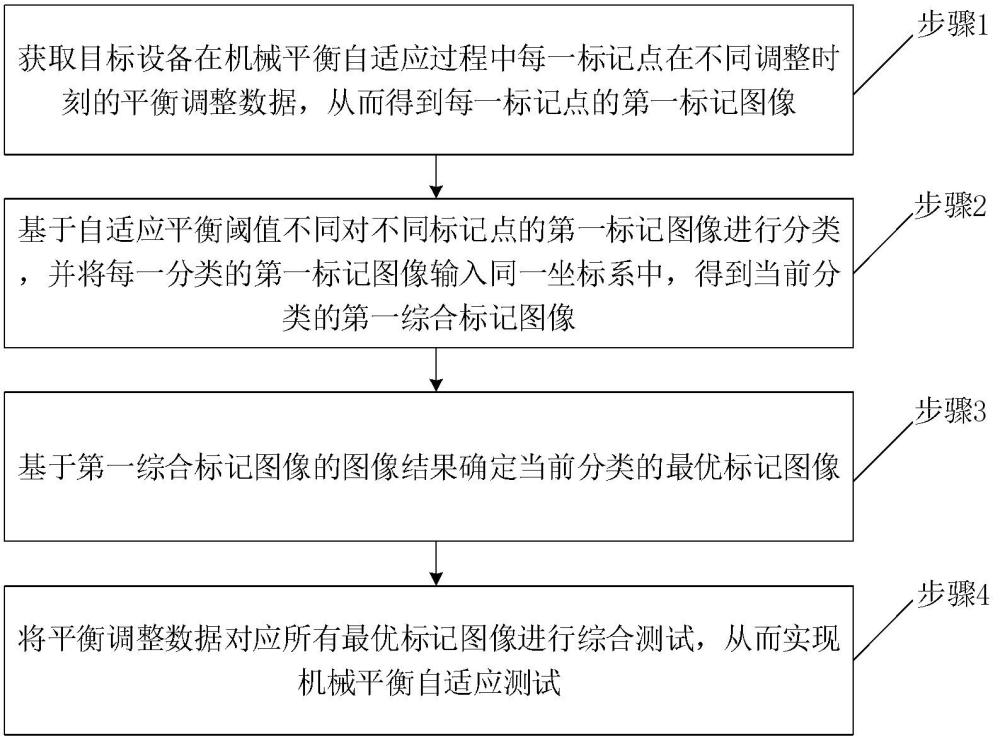
3、步骤1:获取目标设备在机械平衡自适应过程中每一标记点在不同调整时刻的平衡调整数据,从而得到每一标记点的第一标记图像;
4、步骤2:基于自适应平衡阈值不同对不同标记点的第一标记图像进行分类,并将每一分类的第一标记图像输入同一坐标系中,得到当前分类的第一综合标记图像;
5、步骤3:基于第一综合标记图像的图像结果确定当前分类的最优标记图像;
6、步骤4:将平衡调整数据对应所有最优标记图像进行综合测试,从而实现机械平衡自适应测试。
7、根据本发明提供的获取目标设备在机械平衡自适应过程中每一标记点在不同调整时刻的平衡调整数据,从而得到每一标记点的第一标记图像,包括:
8、步骤11:基于目标设备的平衡自适应调整参考结果确定目标设备进行平衡自适应的结束时刻,并获取目标设备的平衡自适应开始时刻;
9、步骤12:根据开始时刻及结束时刻确定目标设备平衡自适应的第一时间差;
10、步骤13:根据目标设备的设备形态确定目标设备进行平衡调整的若干关键点作为标记点;
11、步骤14:根据第一时间差确定平衡调整获取周期,并在每一平衡调整获取周期中提取任一时刻的标记点位置数据作为当前平衡调整获取周期的第一平衡调整数据;
12、步骤15:将第一平衡调整数据按照三维空间移动方向分为第一数据、第二数据、第三数据;
13、步骤16:比较同一标记点在相邻平衡调整获取周期的第一数据、第二数据及第三数据;
14、若第一数据、第二数据、第三数据中出现与实时平衡调整趋势相反的平衡调整趋势,则将对应数据剔除,并同时剔除对应平衡调整获取周期的剩余三维移动数据;
15、同时,获取当前平衡调整获取周期除当前时刻外任一时刻的平衡调整数据作为当前平衡调整获取周期的第一数据、第二数据及第三数据,并重新进行数据比较,若仍出现与实时平衡调整趋势相反的平衡调整趋势,则将当前平衡调整获取周期的平衡调整数据剔除,并基于剩余平衡调整数据得到当前标记点在平衡自适应过程的第一平衡调整数据;
16、步骤17:基于比较结果将每一标记点在平衡调整获取周期得到的第一平衡调整数据按照时间顺序排序,并根据排序结果得到当前标记点的第一标记图像。
17、本发明提供的基于自适应平衡阈值不同对不同标记点的第一标记图像进行分类,包括:
18、步骤21:获取目标设备进行平衡自适应过程中的平衡调整范围,并对平衡调整范围进行拆分,得到每一子平衡范围的自适应平衡阈值;
19、步骤22:获取每一第一标记图像中的平衡调整最大差值,并将平衡调整最大差值与每一子平衡范围的自适应平衡阈值进行比较,从而对第一标记图像进行分类。
20、本发明提供的将每一分类的第一标记图像输入同一坐标系中,得到当前分类的第一综合标记图像,包括:
21、步骤01:将同一分类中的每一第一标记图像按照对应标记点在同一平衡调整获取周期的相对位置输入到同一坐标系中;
22、步骤02:将当前坐标系中的最小值对应第一标记图像及最大值对应第一标记图像剔除,从而基于剩余第一标记图像得到当前分类的第一综合标记图像。
23、本发明提供的基于第一综合标记图像的图像结果确定当前分类的最优标记图像,包括:
24、步骤31:将第一综合标记图像中每一第一标记图像的图像趋势进行比较,剔除图像趋势差异超过预设差异值的第一标记图像,得到第二综合标记图像;
25、步骤32:基于第二综合标记图像的每一第一标记图像进行第一排序,并根据第二综合标记图像中第一标记图像的数量及对应第一排序结果,得到第一基准标记图像;
26、步骤33:将与第一基准标记图像相邻的两个第一标记图像按照影响权重对第一基准标记图像进行调整得到第二基准标记图像,并剔除相邻的第一标记图像;
27、步骤34:将与第二基准标记图像相邻的两个第一标记图像按照权重对第二基准标记图像进行调整,直至基于第二综合标记图像中每一第一标记图像得到当前分类的唯一标记图像,即为当前分类的最优标记图像。
28、本发明提供的根据第二综合标记图像中第一标记图像的数量及对应第一排序结果,得到第一基准标记图像,包括:
29、比较第二综合标记图像中第一标记图像的数量;
30、若第二综合标记图像中第一标记图像的数量为奇数,则将第一排序结果中处于排序最中间的第一标记图像作为第一基准标记图像;
31、反之,则将第一排序结果中处于排序最中间的两个第一标记图像作为参考图像,并将两参考图像进行均值处理的,得到第一基准标记图像。
32、本发明提供的将平衡调整数据对应所有最优标记图像进行综合测试,从而实现机械平衡自适应测试,包括:
33、步骤41:将目标设备在机械平衡自适应过程的平衡调整数据对应的每一最优标记图像进行逐一测试;
34、步骤42:将每一最优标记图像的测试结果与标准平衡自适应结果进行比较,并基于比较结果确定当前最优标记图像对应标记点的机械平衡自适应精度;
35、步骤43:基于每一最优标记图像的机械平衡自适应精度综合确定目标设备在机械平衡自适应过程中的综合测试结果。
36、本发明提供的基于机械平衡自适应测试结果对目标设备的机械平衡自适应算法进行调整,包括:
37、步骤51:获取目标设备的第一机械平衡自适应算法及对应的第一平衡自适应精度;
38、步骤52:将机械平衡自适应测试结果与基于实时机械平衡自适应算法的标准平衡自适应测试结果进行比较,确定实时机械平衡自适应精度;
39、步骤53:将实时机械平衡自适应精度与第一平衡自适应精度进行比较;
40、若第一平衡自适应精度大于实时机械平衡自适应精度,则将第一平衡自适应精度对应的第一机械平衡自适应算法作为目标设备的最终机械平衡自适应算法;
41、反之,则将实时机械平衡自适应精度对第一平衡自适应精度进行优化,并对对应第一机械平衡自适应算法进行调整,得到目标设备的最终机械平衡自适应算法。
42、本发明提供的一种机械平衡自适应测试方法,通过对目标设备在不同平衡自适应调整时刻对应的图像进行分析,可以使得对机械平衡自适应结果测试更加准确,提高目标设备的工作效率。
- 还没有人留言评论。精彩留言会获得点赞!