一种自适应抗扰多目标方位跟踪方法、系统、芯片及设备
本技术属于一种目标方位跟踪方法,具体涉及一种自适应抗扰多目标方位跟踪方法、系统、芯片及设备。
背景技术:
1、基于被动声呐基阵的水下目标方位估计是声呐信号处理中的一个重要研究课题。被动声呐基阵本身并不发出声波信号,通过接收水下目标的声波信号进行探测和定位。
2、现有目标方位估计方法可根据原理可分为传统目标方位估计方法和目标方位跟踪方法两类。其中,目标方位跟踪方法主要基于贝叶斯滤波算法的框架实现,将变化的目标方位角和被动声呐基阵接收到的信号分别看作带随机噪声扰动的状态和量测。传统目标方位跟踪方法在估计目标方位时,不仅取决于被动声呐基阵获得的量测,还考虑了目标的运动学特征,因此,相较目标方位跟踪方法,传统目标方位估计方法的其稳健性和精度更高。
3、但是,在探测范围内存在强干扰的影响时,现有目标方位估计方法均存在导致目标方位跟踪性能严重下降的问题,限制了其应用范围。
技术实现思路
1、本技术针对在探测范围内存在强干扰影响时,现有目标方位估计方法均存在目标方位跟踪性能严重下降的问题,所要解决的技术问题在于针对上述现有技术中的不足,提供一种自适应抗扰多目标方位跟踪方法、系统、芯片及设备,解决了水下环境噪声导致目标方位跟踪性能严重下降的问题。
2、为了实现上述目的,本技术采用以下技术方案予以实现:
3、第一方面,本技术提出一种自适应抗扰多目标方位跟踪方法,包括:
4、采用零陷展宽技术和广义对角加载技术对采样协方差矩阵进行修改,得到稳健波束形成器的权向量;
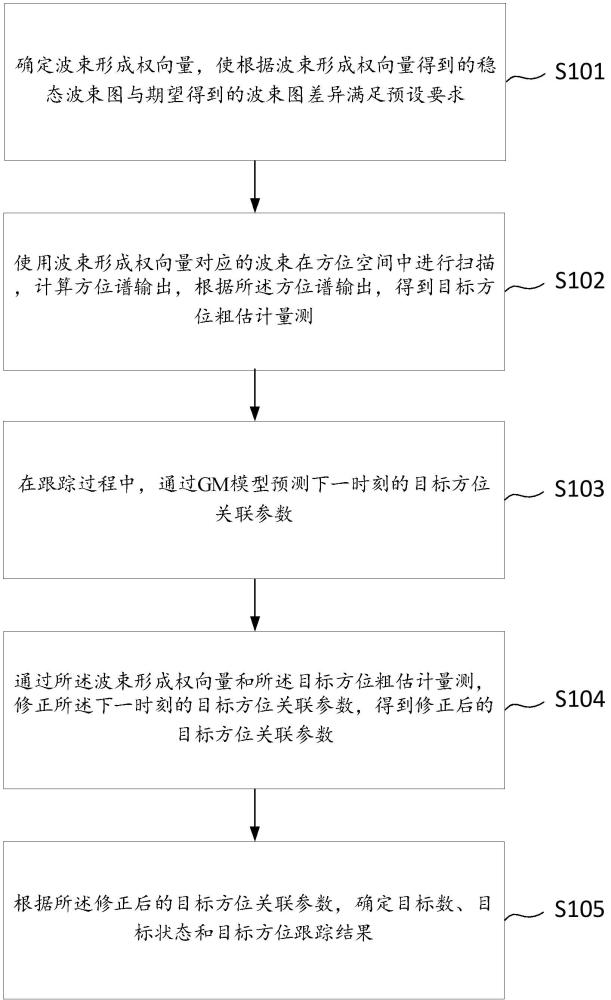
5、使用稳健波束形成器的权向量对应的波束在方位空间中进行扫描,计算方位谱输出,根据所述方位谱输出,得到目标方位粗估计量测;
6、在跟踪过程中,通过gm模型预测下一时刻的目标方位关联参数;
7、通过所述波束形成权向量和所述目标方位粗估计量测,修正所述下一时刻的目标方位关联参数,得到修正后的目标方位关联参数;
8、根据所述修正后的目标方位关联参数,确定目标数、目标状态和目标方位跟踪结果。
9、进一步地,所述采用零陷展宽技术和广义对角加载技术对采样协方差矩阵进行修改,得到稳健波束形成器的权向量,包括:
10、
11、其中,表示稳健波束形成器的权向量,表示零陷展宽技术修改后的协方差矩阵,表示对角加载量,表示单位矩阵,表示跟踪过程中相邻时刻之间的时间间隔,表示波束指向方向向量,表示共轭转置,“”表示hadamard乘运算。
12、进一步地,所述零陷展宽技术修改后的协方差矩阵,包括:
13、
14、其中,表示采样协方差矩阵,表示实正定矩阵。
15、进一步地,所述计算方位谱输出,包括:
16、
17、其中,表示方位谱输出,表示扫描角,表示共轭转置,表示阵列接收信号采样协方差矩阵。
18、进一步地,所述目标方位关联参数包括:集势分布、存活目标分量权值、存活目标分量均值和存活目标分量均方误差矩阵;
19、所述通过gm模型预测下一时刻的目标方位关联参数,包括:
20、预测下一时刻的集势分布:
21、
22、其中,表示时刻预测时刻的预测集势分布,表示时刻新生目标集势分布,表示从个不同元素中取个元素的组合数,为目标存活概率,表示时刻集势分布,表示存活目标集势分布,表示目标数二次累加参数,表示目标数累加参数,表示目标数自变量;
23、预测下一时刻的存活目标分量权值:
24、
25、其中,表示时刻预测时刻的存活目标分量权值,表示目标序号,表示存活目标分量个数,表示时刻的存活目标分量权值;
26、预测下一时刻的存活目标分量均值:
27、
28、其中,表示时刻预测时刻的存活目标分量均值,表示目标动力学模型的状态转移矩阵,表示时刻的存活目标分量均值;
29、预测下一时刻的存活目标分量均方误差矩阵:
30、
31、其中,表示时刻预测时刻的存活目标分量均方误差矩阵,表示噪声驱动矩阵,表示过程噪声方差,表示 k-1时刻均方误差矩阵,表示跟踪过程中相邻时刻之间的时间间隔。
32、进一步地,所述通过所述波束形成权向量和所述目标方位粗估计量测,修正所述下一时刻的目标方位关联参数,包括:
33、修正下一时刻的集势分布:
34、
35、其中,表示修正后时刻的集势分布,表示时刻的0阶集势累乘参数,表示预测目标分量权值向量,表示为时刻的量测,表示预测集势分布;
36、修正下一时刻的存活目标分量权值:
37、
38、其中,表示修正后时刻的存活目标分量权值,表示 k时刻的检测概率,表示预测权值,表示预测目标高斯分布,表示1阶集势累乘参数,表示量测,表示虚警泊松强度,表示量测为时的虚警强度,表示舍弃掉元素后的集合;
39、修正下一时刻的存活目标分量均值:
40、
41、其中,表示修正后时刻的存活目标分量均值,表示预测目标状态,表示卡尔曼滤波增益,表示预测量测;
42、修正下一时刻的存活目标分量均方误差矩阵:
43、
44、其中,表示修正后时刻的存活目标分量均方误差矩阵,表示量测函数雅克比矩阵,表示单位矩阵,表示目标分量的预测均方误差矩阵。
45、进一步地,所述根据所述修正后的目标方位关联参数,确定目标数、目标状态和目标方位跟踪结果,包括:
46、取修正后的集势分布最大值对应的作为目标数估计值;
47、取存活目标分量权值最大的个目标分量对应的存活目标分量均值,作为目标状态估计值,以目标状态估计值的第一项作为目标方位跟踪结果。
48、第二方面,本技术提出一种自适应抗扰多目标方位跟踪系统,包括:
49、自适应模块,用于确定波束形成权向量,使根据波束形成权向量 得到的稳态波束图与期望得到的波束图差异满足预设要求;
50、粗估计模块,用于使用波束形成权向量对应的波束在方位空间中进行扫描,计算方位谱输出,根据所述方位谱输出,得到目标方位粗估计量测;
51、预测模块,用于在跟踪过程中,通过gm模型预测下一时刻的目标方位关联参数;
52、修正模块,用于通过所述波束形成权向量和所述目标方位粗估计量测,修正所述下一时刻的目标方位关联参数,得到修正后的目标方位关联参数;
53、估计模块,用于根据所述修正后的目标方位关联参数,确定目标数、目标状态和目标方位跟踪结果。
54、第三方面,本技术提出一种芯片,包括:
55、存储器,其上存储有计算机程序;
56、处理器,用于执行所述存储器中的所述计算机程序,以实现上述自适应抗扰多目标方位跟踪方法的步骤。
57、第四方面,本技术提出一种电子设备,其特征在于,
58、包括上述的芯片。
59、与现有技术相比,本技术具有以下有益效果:
60、本技术提出一种自适应抗扰多目标方位跟踪方法,采用零陷展宽技术和广义对角加载技术对采样协方差矩阵进行修改,得到稳健波束形成器的权向量,再形成对应的波束,这样的波束形成方法既能自动在干扰方位形成较宽的零陷,又能得到优化的对角加载量,因此,能够有效抑制快速运动的强干扰,并减小系统误差造成的功率估计误差和波束图畸变。通过计算方位谱输出对目标方位进行粗估计,利用gm模型预测下一时刻的目标方位关联参数,通过波束形成权向量对预测的下一时刻的目标方位关联参数进行修正,消除了水下环境噪声对目标方位跟踪方法性能的影响。基于上述原因,本技术实现了自适应抗扰多目标方位跟踪。
61、本技术还提出了一种自适应抗扰多目标方位跟踪系统、芯片和电子设备,基于上述自适应抗扰多目标方位跟踪方法,具备上述自适应抗扰多目标方位跟踪方法的全部优势。
- 还没有人留言评论。精彩留言会获得点赞!