基于角反射器的合成孔径雷达形变监测精度验证装置以及验证方法与流程
本发明涉及雷达监测,具体而言涉及基于角反射器的合成孔径雷达形变监测精度验证装置以及验证方法。
背景技术:
1、人工角反射器差分干涉测量技术是基于人工布设高相干强反射目标点的时间序列形变监测手段,多用于解决在植被覆盖低相干区域难以提取有效测量点问题和合成孔径雷达干涉测量(insar)监测结果的精度验证。角反射器(cr)点的后向散射强度要远远大于周围的地物,在合成孔径雷达(sar)图像上会呈现一个个明显的亮点,可以有效提取这些角反射器(cr)点,通过这些点的相位变化获取高精度的形变信息。
2、当被监测区域的形变较稳定时,各个角反射器(cr)点无明显变形现象,而为验证合成孔径雷达干涉测量(insar)的监测能力,需要在特定时间段将某些角反射器(cr)的位置进行人为主动的调整,以验证基于角反射器合成孔径雷达干涉测量(cr-insar)的监测精度。
3、目前角反射器驱动结构一般是丝杆传动结构,例如专利文献1提出的使用三根丝杆传动结构控制角反射器的俯仰角度,专利文献2中提出使用三轴微动驱动部件实现角反射器在野外安装时的人工微调,但上述专利仅能实现角反射器的准确对准安装,缺乏角反射器在三轴方向亚毫米级精度的位移调整能力,从而无法实现基于人工角反射器的合成孔径雷达干涉测量精度验证。
4、现有技术文献
5、专利文献1cn105974368a一种gnss_dinsar技术集成的角反射装置
6、专利文献2cn109212490a三轴微动式人工角反射器
技术实现思路
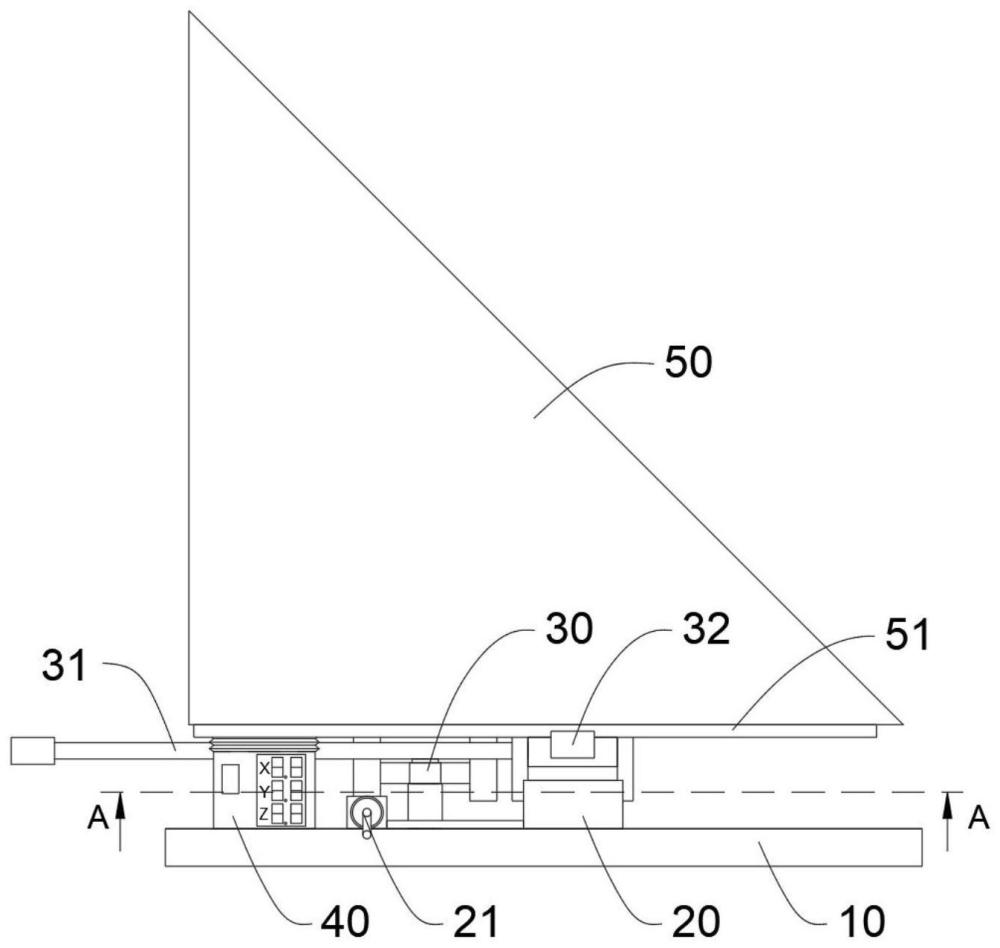
1、针对现有技术中雷达形变检测中的精度验证存在的技术问题,本发明的第一方面提出基于角反射器的合成孔径雷达形变监测精度验证装置,包括:
2、基座,设置在待检测形变区域;
3、角反射器,处于所述基座的上方;
4、z轴驱动部件,第一端连接到所述基座,第二端连接到所述角反射器,所述z轴驱动部件用于驱动所述角反射器沿z轴方向运动;
5、x-y轴驱动部件,连接到所述基座,所述x-y轴驱动部件用于驱动所述角反射器沿x-y轴方向移动;
6、位移反馈部件,连接到所述基座,所述位移反馈部件用于检测所述角反射器相较于所述基座在x-y-z轴方向产生的位移;
7、其中,所述位移反馈部件包括连接到基座的x-y轴检测单元、z轴检测单元以及连接到角反射器的触发部件,所述触发部件被设置成能产生第一光束和第二光束,所述z轴检测单元用于检测所述第一光束在z轴方向的位置,所述x-y轴检测单元用于检测所述第二光束在x-y平面内的相对位置;
8、所述位移反馈部件还包括位移检测部件,当所述角反射器被所述z轴驱动部件、x-y轴驱动部件所驱动时,所述位移检测部件根据x-y轴检测单元、z轴检测单元检测到的第一光束、第二光束在x-y-z轴方向产生的位移,计算所述角反射器的位移。
9、优选的,所述x-y轴驱动部件包括x轴驱动杆和y轴驱动杆,所述基座上设有转轴,所述x轴驱动杆和y轴驱动杆均连接到所述转轴,并能绕所述转轴转动,所述角反射器的底部设有x轴限位通道和y轴限位通道;
10、所述x轴驱动杆的第一端延伸到所述x轴限位通道内,第二端向角反射器外侧延伸,所述y轴驱动杆的第一端延伸到所述y轴限位通道内,第二端向角反射器外侧延伸,所述x轴限位通道被设置成限制所述x轴驱动杆在x轴方向相对于角反射器发生位移,所述y轴限位通道被设置成限制所述y轴驱动杆在y轴方向相对于角反射器发生位移;
11、当所述x轴驱动杆的第二端被操作向x轴方向移动时,所述角反射器向x轴方向移动,当所述y轴驱动杆的第二端被操作向y轴方向移动时,所述角反射器向y轴方向移动。
12、优选的,所述转轴的轴线平行于z轴,所述x轴驱动杆和y轴驱动杆设置在不同的水平高度,所述x轴限位通道、y轴限位通道被设置成在角反射器的整个z轴行程内都对x轴驱动杆、y轴驱动杆形成限位。
13、优选的,所述x轴驱动杆、y轴驱动杆均包括杆身以及处于杆身第一端的盘型限位结构,所述x轴限位通道或y轴限位通道的宽度和长度等于盘型限位结构的直径。
14、优选的,所述z轴驱动部件包括一个第一油缸和至少一个第二油缸,所述第二油缸内的油腔直径大于第一油缸内的油腔直径,所述第一油缸的油腔和第二油缸的油腔通过输油管连通,所述第一油缸沿垂直于z轴的方向布置,所述第二油缸沿平行于z轴的方向布置,所述第二油缸的两端分别连接到基座和角反射器,所述第一油缸设有手摇推杆,当所述手摇推杆转动时,手摇推杆一端的活塞在第一油缸的油腔内滑动,控制所述第二油缸伸缩。
15、优选的,所述第二油缸的第一端与所述角反射器沿z轴方向固定,所述第二油缸的第一端相对于所述角反射器在x-y轴方向相对滑动。
16、优选的,所述角反射器的底部设有限位框,所述第二油缸的第一端设有十字限位结构,所述限位框内设有四个限位槽,所述十字限位结构延伸到所述限位槽中,当所述角反射器沿x-y平面移动时,所述十字限位结构保持与所述限位槽接触,所述角反射器的底部还设有限位台,所述限位台和限位框之间形成所述x轴限位通道和y轴限位通道。
17、优选的,所述x-y轴检测单元垂直于z轴,所述z轴检测单元平行于z轴,所述x-y轴检测单元包括多个按照矩形阵列紧密分布的正方形光纤束,所述z轴检测单元包括多个沿z轴方向紧密排列的矩形光纤束,所述x-y轴检测单元和z轴检测单元处于密闭遮挡的空间内。
18、优选的,所述位移检测部件包括光敏传感器,所述光敏传感器被设置成对应每个正方形光纤束和矩形光纤束分布。
19、本发明第二方面提出一种技术方案,一种基于角反射器的形变监测精度验证方法,使用上述的精度验证装置,包括以下步骤:
20、步骤1、布置好角反射器后,获得基于角反射器合成孔径雷达干涉测量结果,此结果为角反射器沿着雷达卫星视线向的位移结果,记为结果a;
21、步骤2、通过z轴驱动部件和/或x-y轴驱动部件控制角反射器向预定的方向移动,并通过位移反馈部件获得角反射器的实际调整位移,而后根据x轴或y轴方位角(与正北方向的夹角)和卫星入射角计算合成后的角反射器在雷达卫星视线向的位移结果;
22、步骤3、再次获得基于角反射器合成孔径雷达干涉测量结果,记为结果b;
23、步骤4、根据结果b和结果a获得测量位移结果,比较测量位移结果与实际位移真值之间的差值,计算差值中误差,作为角反射器干涉测量的精度评定指标;
24、其中,在步骤2中,对单个角反射器在不同的卫星监测时段进行空间位置调节。
25、与现有技术相比,本发明的优点在于:
26、本发明设置的x-y轴驱动部件采用杠杆方式驱动,放大了操作端位移,z轴驱动部件采用液压的方式驱动,在放大操作端位移保证调整精度的同时,让驱动部件的纵向空间减小,令结构紧凑具有更好的抗风性,并且通过位移反馈部件准确的测量出角反射器调整的位移,以保证合成孔径雷达干涉测量精度验证的有效性和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!