视觉检测运动轨迹控制方法及其相关装置与流程
本技术涉及待检测物运动轨迹控制,具体涉及一种视觉检测运动轨迹控制方法及其相关装置。
背景技术:
1、为了满足3c电子产品的高质量要求,需要对产品的外观(划痕、亮丝、粗糙度等)和结构(外腔通孔、盲孔长宽高、高度差、内腔结构等)进行检测。目前,通常采用传感器不动而产品运动的方式,传感器在产品运动过程中连续拍照以对产品进行检测。然而,由于产品存在公差,导致产品与传感器之间的成像工作条件无法始终保持一致,导致传感器所获取的图像存在不清晰的问题,从而影响对产品的检测精度。
技术实现思路
1、鉴于以上内容,有必要提出一种视觉检测运动轨迹控制方法及其相关装置,以对待检测物的运动轨迹进行实时控制,保证待检测物与传感器之间的成像工作条件保持一致,保证传感器所获取的图像的清晰度,进而提高待检测物的检测精度。
2、本技术实施例提供一种视觉检测运动轨迹控制方法,包括:
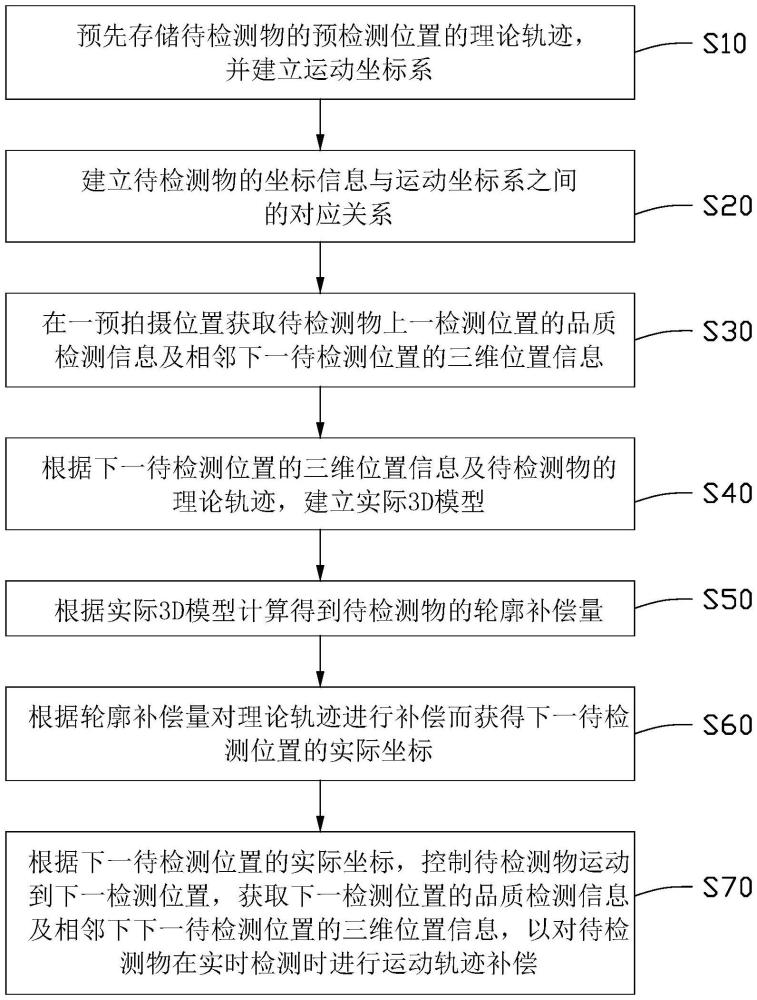
3、预先存储待检测物的预检测位置的理论轨迹,并建立运动坐标系;
4、建立所述待检测物的坐标信息与所述运动坐标系之间的对应关系;
5、在一预拍摄位置获取所述待检测物上一检测位置的品质检测信息及相邻下一待检测位置的三维位置信息;
6、根据所述下一待检测位置的三维位置信息及所述待检测物的理论轨迹,建立实际3d模型;
7、根据所述实际3d模型计算得到所述待检测物的轮廓补偿量;
8、根据所述轮廓补偿量对所述理论轨迹进行补偿而获得所述下一待检测位置的实际坐标;
9、根据所述下一待检测位置的实际坐标,控制所述待检测物运动到下一检测位置,获取所述下一检测位置的品质检测信息及相邻下下一待检测位置的三维位置信息,以对所述待检测物在实时检测时进行运动轨迹补偿。
10、在一些实施例中,所述预先存储待检测物的预检测位置的理论轨迹的步骤,包括:
11、获取所述待检测物的平面图像;
12、根据所述待检测物的平面图像划分得到多个所述预检测位置以及所述预检测位置的理论轨迹;
13、存储所述待检测物的所述预检测位置的理论轨迹。
14、在一些实施例中,所述根据所述下一待检测位置的三维位置信息及所述待检测物的理论轨迹,建立实际3d模型的步骤,包括:
15、根据所述下一待检测位置的三维位置信息得到坐标信息、2d图像和3d高度图像;
16、根据所述下一待检测位置的坐标信息及所述待检测物的理论轨迹拟合得到补偿轨迹;
17、根据所述补偿轨迹及所述下一待检测位置的2d图像和3d高度图像建立所述实际3d模型。
18、在一些实施例中,所述在一预拍摄位置获取所述待检测物上一检测位置的品质检测信息及相邻下一待检测位置的三维位置信息的步骤,包括:
19、在所述预拍摄位置及所述一检测位置之间将一束光线分为直射光束和折射光束,通过所述直射光束获取所述一检测位置的品质检测信息,通过所述折射光束获取所述下一待检测位置的三维位置信息。
20、在一些实施例中,所述将一束光线分为直射光束和折射光束包括:
21、将一束光线穿过一三棱分光镜以分为所述直射光束和所述折射光束。
22、在一些实施例中,所述视觉检测运动轨迹控制方法还包括:
23、确定获取所述待检测物表面的图像的原始参数,所述原始参数包括光强度参数、曝光值参数及焦距参数;
24、根据所述原始参数获取所述待检测物表面的初始图像,并根据所述初始图像确实初始校正参数;
25、根据所述初始校正参数获取所述待检测物表面的目标图像,并根据所述目标图像确定目标参数;
26、根据所述目标参数获取所述待检测物表面的2d图像和3d高度图像并进行验证。
27、本技术实施例还提供一种视觉检测运动轨迹控制系统,包括:
28、存储模块,用于预先存储待检测物的预检测位置的理论轨迹;
29、坐标模块,用于建立运动坐标系;所述坐标模块还用于建立所述待检测物的坐标信息与所述运动坐标系之间的对应关系;
30、获取模块,用于在一预拍摄位置获取所述待检测物上一检测位置的品质检测信息及相邻下一待检测位置的三维位置信息;
31、建模模块,用于根据所述下一待检测位置的三维位置信息及所述待检测物的理论轨迹,建立实际3d模型;
32、计算模块,用于根据所述实际3d模型计算得到所述待检测物的轮廓补偿量;
33、补偿模块,用于根据所述轮廓补偿量对所述理论轨迹进行补偿而获得所述下一待检测位置的实际坐标;
34、控制模块,用于根据所述下一待检测位置的实际坐标,控制所述待检测物运动到下一检测位置,获取所述下一检测位置的品质检测信息及相邻下下一待检测位置的三维位置信息。
35、本技术实施例还提供一种视觉检测运动轨迹控制装置,包括:
36、运动平台,用于带动待检测物沿第一方向移动、沿第二方向移动、绕第三方向旋转中至少之一,所述第一方向、所述第二方向和所述第三方向相互垂直;
37、传感器,用于获取所述待检测物的品质检测信息及三维位置信息;
38、处理器,分别与所述运动平台及所述传感器耦接,用于:
39、预先存储待检测物的预检测位置的理论轨迹,并建立运动坐标系;
40、建立所述待检测物的坐标信息与所述运动坐标系之间的对应关系;
41、在一预拍摄位置获取所述待检测物上一检测位置的品质检测信息及相邻下一待检测位置的三维位置信息;
42、根据所述下一待检测位置的三维位置信息及所述待检测物的理论轨迹,建立实际3d模型;
43、根据所述实际3d模型计算得到所述待检测物的轮廓补偿量;
44、根据所述轮廓补偿量对所述理论轨迹进行补偿而获得所述下一待检测位置的实际坐标;
45、根据所述下一待检测位置的实际坐标,控制所述待检测物运动到下一检测位置,获取所述下一检测位置的品质检测信息及相邻下下一待检测位置的三维位置信息,以对所述待检测物在实时检测时进行运动轨迹补偿。
46、本技术实施例还提供一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的视觉检测运动轨迹控制方法。
47、本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质有计算机程序,所述计算机程序被处理器执行时实现如上所述的视觉检测运动轨迹控制方法。
48、上述视觉检测运动轨迹控制方法、视觉检测运动轨迹控制系统、视觉检测运动轨迹控制装置、计算机设备及计算机可读存储介质,通过预先存储待检测物的预检测位置的理论轨迹,建立运动坐标系,建立待检测物的坐标信息与运动坐标系之间的对应关系,在一预拍摄位置获取待检测物上一检测位置的品质检测信息及相邻下一待检测位置的三维位置信息,根据下一待检测位置的三维位置信息及待检测物的理论轨迹,建立实际3d模型,根据实际3d模型计算得到待检测物的轮廓补偿量,根据轮廓补偿量对理论轨迹进行补偿而获得下一待检测位置的实际坐标,根据下一待检测位置的实际坐标,控制待检测物运动到下一检测位置,在预拍摄位置获取下一检测位置的品质检测信息及相邻下下一待检测位置的三维位置信息,从而对待检测物在实时检测时的运动轨迹进行实时补偿控制,保证待检测物与预拍摄位置处的传感器之间的成像工作条件保持一致,避免景深差异导致影响模糊或偏位,从而使得传感器获取到清晰的图像,以便于根据清晰的图像对待检测物的外观和结构进行检测,提高待检测物的检测精度。
- 还没有人留言评论。精彩留言会获得点赞!