地图切换方法、装置、电子设备及存储介质与流程
本发明涉及计算机,特别是涉及一种地图切换方法、一种地图切换装置、一种电子设备以及一种可读存储介质。
背景技术:
1、当前市场上推出的城区领航辅助驾驶功能的技术方案都是基于高精度地图(hdmap,high-definition map)来实现高精度定位及超视距的感知,但由于地图法规政策以及成本的原因,目前只有部分主要城市才有权限开放一定区域的高精度地图供城区领航功能的实现,对于没有高精度地图的区域及城市则无法向用户开放具备领航辅助驾驶的功能。
2、除了一定区域的高精度地图,当前可供智能驾驶行业使用的地图还包括标准精度地图(sd map,standard-definition map),以及在满足法规的前提下推出了介于高精度地图(hd map)与标准精度地图(sd map)的adas(advanced driver assistance system,高级驾驶辅助系统)地图。
3、为实现领航功能在不同的城市落地并向用户开放,行车智驾系统需要在这三种类型的地图区域都具备点对点的领航功能。例如,车辆在城区行驶且开启了城区领航,在导航a点到b点路径上的hd map切换至adas map或者sd map。不同的地图直接影响定位方案及定位输出的数据类型,切换地图后定位的变化将导致车辆的控车轨迹产生较大的横向偏移,简单直接地进行功能切换则很大可能导致不良的驾驶体验甚至驾驶安全风险。
4、现有方案针对hd map切换至adas map或sd map的场景都是通过降级的方式完成功能的切换,即用户需要手动接管通过切换点,避免横向控制突变带来的安全风险的同时,极大地影响了高阶辅助驾驶的体验连贯性。
技术实现思路
1、本发明实施例所要解决的技术问题是提供一种地图切换方法、装置、电子设备及可读存储介质,以便解决针对hd map切换至adas map或sd map的场景都是通过降级的方式完成功能的切换,即用户需要手动接管通过切换点,极大地影响了高阶辅助驾驶的体验连贯性的问题。
2、为了解决上述问题,本发明提供了一种地图切换方法,所述方法包括:
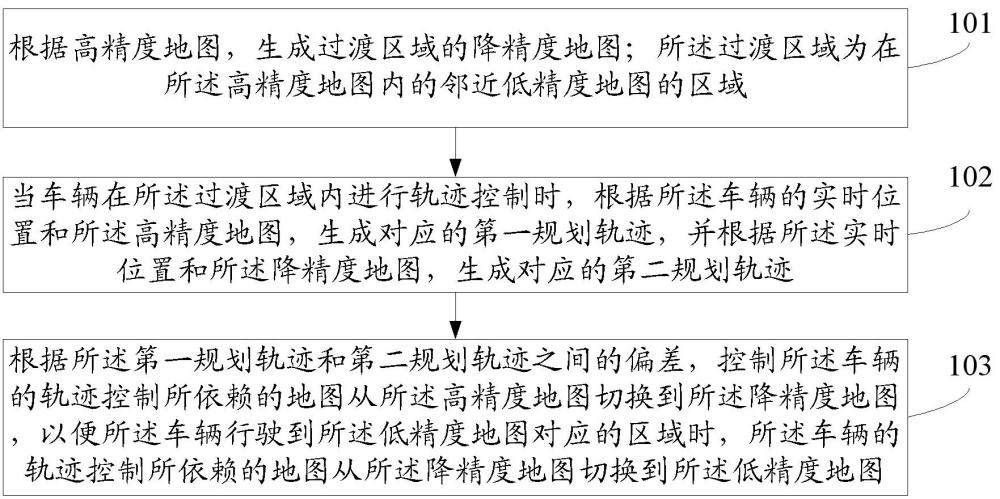
3、根据高精度地图,生成过渡区域的降精度地图;所述过渡区域为在所述高精度地图内的邻近低精度地图的区域;
4、当车辆在所述过渡区域内进行轨迹控制时,根据所述车辆的实时位置和所述高精度地图,生成对应的第一规划轨迹,并根据所述实时位置和所述降精度地图,生成对应的第二规划轨迹;
5、根据所述第一规划轨迹和第二规划轨迹之间的偏差,控制所述车辆的轨迹控制所依赖的地图从所述高精度地图切换到所述降精度地图,以便所述车辆行驶到所述低精度地图对应的区域时,所述车辆的轨迹控制所依赖的地图从所述降精度地图切换到所述低精度地图。
6、可选地,所述降精度地图的精度与所述低精度地图的精度一致。
7、可选地,所述根据高精度地图,生成过渡区域的降精度地图,包括:
8、从所述高精度地图中,解析出所述低精度地图的数据维度对应的地图数据,和所述高精度地图中的道路级拓扑信息;
9、结合所述地图数据和道路级拓扑信息,生成所述降精度地图。
10、可选地,所述根据所述实时位置和所述降精度地图,生成对应的第二规划轨迹,包括:
11、基于视觉感知模型确定视觉感知地图信息;
12、根据所述降精度地图和所述视觉感知地图信息,融合生成所述实时位置附近的实时视觉降精度地图;
13、根据所述实时位置和所述实时视觉降精度地图,生成所述第二规划轨迹。
14、可选地,所述根据所述第一规划轨迹和第二规划轨迹之间的偏差,控制所述车辆的轨迹控制所依赖的地图从所述高精度地图切换到所述降精度地图,包括:
15、根据所述第一规划轨迹和第二规划轨迹,确定轨迹偏差;
16、根据所述轨迹偏差和预设偏差阈值,控制所述车辆的轨迹控制所依赖的地图从所述高精度地图切换到所述降精度地图。
17、可选地,所述根据所述第一规划轨迹和第二规划轨迹,确定轨迹偏差,包括:
18、根据所述第一规划轨迹和第二规划轨迹中对应的轨迹点之间的横向位置偏差、横向速度偏差和横向加速度偏差,确定安全性偏差;
19、根据所述第一规划轨迹和第二规划轨迹中对应的轨迹点之间的纵向位置偏差、纵向速度偏差和纵向加速度偏差,确定舒适性偏差;
20、对所述安全性偏差和舒适性偏差进行加权求和,得到所述轨迹偏差。
21、可选地,所述根据所述轨迹偏差和预设偏差阈值,控制所述车辆的轨迹控制所依赖的地图从所述高精度地图切换到所述降精度地图,包括:
22、在持续第一预设时长所述轨迹偏差小于等于所述预设偏差阈值,且所述车辆处于过渡区域内的情况下,将所述车辆的轨迹控制所依赖的地图从所述高精度地图切换到所述降精度地图。
23、可选地,所述方法还包括:
24、在所述轨迹偏差大于所述预设偏差阈值,且所述车辆距离驶出所述过渡区域大于预设距离的情况下,保持所述车辆的轨迹控制所依赖的地图为所述高精度地图。
25、可选地,所述方法还包括:
26、在所述轨迹偏差大于所述预设偏差阈值,且所述车辆距离驶出所述过渡区域小于等于预设距离的情况下,发出驾驶员接管提醒,并从自动领航模式降级为辅助驾驶模式;
27、在驾驶员在第二预设时长内成功接管,且所述车辆行驶到所述低精度地图对应的区域的情况下,恢复所述自动领航模式;
28、在驾驶员在所述第二预设时长内未成功接管的情况下,退出所述辅助驾驶模式。
29、可选地,在所述根据高精度地图,生成过渡区域的降精度地图之前,所述方法还包括:
30、以所述车辆启动时的车辆位置为原点,建立用于所述实时位置、所述高精度地图、所述降精度地图和所述低精度地图的统一坐标系。
31、本发明还提供了一种地图切换装置,所述装置包括:
32、地图生成模块,用于根据高精度地图,生成过渡区域的降精度地图;所述过渡区域为在所述高精度地图内的邻近低精度地图的区域;
33、轨迹生成模块,用于当车辆在所述过渡区域内进行轨迹控制时,根据所述车辆的实时位置和所述高精度地图,生成对应的第一规划轨迹,并根据所述实时位置和所述降精度地图,生成对应的第二规划轨迹;
34、地图切换模块,用于根据所述第一规划轨迹和第二规划轨迹之间的偏差,控制所述车辆的轨迹控制所依赖的地图从所述高精度地图切换到所述降精度地图,以便所述车辆行驶到所述低精度地图对应的区域时,所述车辆的轨迹控制所依赖的地图从所述降精度地图切换到所述低精度地图。
35、可选地,所述降精度地图的精度与所述低精度地图的精度一致。
36、可选地,所述地图生成模块,包括:
37、解析子模块,用于从所述高精度地图中,解析出所述低精度地图的数据维度对应的地图数据,和所述高精度地图中的道路级拓扑信息;
38、地图生成子模块,用于结合所述地图数据和道路级拓扑信息,生成所述降精度地图。
39、可选地,所述轨迹生成模块,包括:
40、信息确定子模块,用于基于视觉感知模型确定视觉感知地图信息;
41、地图融合生成子模块,用于根据所述降精度地图和所述视觉感知地图信息,融合生成所述实时位置附近的实时视觉降精度地图;
42、轨迹生成子模块,用于根据所述实时位置和所述实时视觉降精度地图,生成所述第二规划轨迹。
43、可选地,所述地图切换模块,包括:
44、偏差确定子模块,用于根据所述第一规划轨迹和第二规划轨迹,确定轨迹偏差;
45、地图切换子模块,用于根据所述轨迹偏差和预设偏差阈值,控制所述车辆的轨迹控制所依赖的地图从所述高精度地图切换到所述降精度地图。
46、可选地,所述偏差确定模块,包括:
47、安全性偏差确定子模块,用于根据所述第一规划轨迹和第二规划轨迹中对应的轨迹点之间的横向位置偏差、横向速度偏差和横向加速度偏差,确定安全性偏差;
48、舒适性偏差确定子模块,用于根据所述第一规划轨迹和第二规划轨迹中对应的轨迹点之间的纵向位置偏差、纵向速度偏差和纵向加速度偏差,确定舒适性偏差;
49、轨迹偏差确定子模块,用于对所述安全性偏差和舒适性偏差进行加权求和,得到所述轨迹偏差。
50、可选地,所述地图切换子模块,包括:
51、地图切换单元,用于在持续第一预设时长所述轨迹偏差小于等于所述预设偏差阈值,且所述车辆处于过渡区域内的情况下,将所述车辆的轨迹控制所依赖的地图从所述高精度地图切换到所述降精度地图。
52、可选地,所述装置还包括:
53、地图保持模块,用于在所述轨迹偏差大于所述预设偏差阈值,且所述车辆距离驶出所述过渡区域大于预设距离的情况下,保持所述车辆的轨迹控制所依赖的地图为所述高精度地图。
54、可选地,所述装置还包括:
55、降级模块,用于在所述轨迹偏差大于所述预设偏差阈值,且所述车辆距离驶出所述过渡区域小于等于预设距离的情况下,发出驾驶员接管提醒,并从自动领航模式降级为辅助驾驶模式;
56、恢复模块,用于在驾驶员在第二预设时长内成功接管,且所述车辆行驶到所述低精度地图对应的区域的情况下,恢复所述自动领航模式;
57、退出模块,用于在驾驶员在所述第二预设时长内未成功接管的情况下,退出所述辅助驾驶模式。
58、可选地,所述装置还包括:
59、坐标系建立模块,用于在所述根据高精度地图,生成过渡区域的降精度地图之前,以所述车辆启动时的车辆位置为原点,建立用于所述实时位置、所述高精度地图、所述降精度地图和所述低精度地图的统一坐标系。
60、本发明实施例还公开了一种电子设备,其特征在于,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
61、存储器,用于存放计算机程序;
62、处理器,用于执行存储器上所存放的程序时,实现如上所述的地图切换方法的步骤。
63、本发明实施例还公开了一种可读存储介质,当所述存储介质中的指令由电子设备的处理器执行时,使得电子设备能够执行本发明实施例中所述的地图切换方法的步骤。
64、依据本发明实施例,通过根据高精度地图,生成过渡区域的降精度地图;所述过渡区域为在所述高精度地图内的邻近低精度地图的区域,当车辆在所述过渡区域内进行轨迹控制时,根据所述车辆的实时位置和所述高精度地图,生成对应的第一规划轨迹,并根据所述实时位置和所述降精度地图,生成对应的第二规划轨迹,根据所述第一规划轨迹和第二规划轨迹之间的偏差,控制所述车辆的轨迹控制所依赖的地图从所述高精度地图切换到所述降精度地图,以便所述车辆行驶到所述低精度地图对应的区域时,所述车辆的轨迹控制所依赖的地图从所述降精度地图切换到所述低精度地图,使得在过渡区域,车辆的轨迹控制所依赖的地图就可以从高精度地图切换到降精度地图,然后车辆继续行驶到低精度地图对应的区域时,车辆的轨迹控制所依赖的地图就可以顺利地从降精度地图切换到低精度地图,因为降精度地图与低精度地图的精度更接近,就可以避免规划轨迹产生较大的偏移,车辆的轨迹就不会发生突变,从而消除安全风险,不再需要通过降级的方式完成功能的切换,用户不再需要手动接管通过切换点,扩大了自动轨迹控制的运行设计域,保证了高阶辅助驾驶的体验连贯性。
- 还没有人留言评论。精彩留言会获得点赞!