一种基于边带幅度在线补偿的MEMS速率陀螺仪模态频率匹配方法及系统
本发明涉及mems速率陀螺仪技术,具体涉及一种基于边带幅度在线补偿的mems速率陀螺仪模态频率匹配方法及系统。
背景技术:
1、mems速率陀螺仪是利用微机电系统(mems)技术,并根据哥氏效应原理工作的一类用于测量角速度的传感器。现阶段,随着集成电路和硅加工技术的快速发展,mems传感器技术在各个领域得到了广泛应用。mems陀螺仪具有体积小、集成度高、成本低、功耗低等优点,已被广泛应用于消费者和工业领域,如穿戴设备,显微视觉定位和工业机器人控制等。
2、当mems速率陀螺仪驱动模态和检测模态的谐振频率相等时,即模态频率匹配,此时检测模态的机械灵敏度最高,哥氏响应最大,从而提升了mems速率陀螺仪的静态性能。但是由于加工的精度和工作环境等方面的影响,使得陀螺仪两工作模态的频率存在差异,即模态频率失配。目前模态频率匹配主要有两类方法:第一类方法是通过改变陀螺仪结构质量调整模态频率,包括利用质量沉积,刻蚀多晶硅和利用局部热应力等方法;另一类是利用静电负刚度效应,通过向陀螺仪的频率调谐电极施加可控的直流电压来单方向改变检测模态的谐振频率,其中最常见的是根据模态频率匹配状态下双边带信号的响应幅度和相位来实现模态频率匹配。改变陀螺仪结构质量为离线调节方式,不具备实时调节的能力,因此利用静电负刚度效应的方法可行性更高。然而,基于双边带信号的模态频率匹配方法需采用边带幅度补偿来提高模态频率匹配精度,幅度补偿系数与驱动模态谐振频率相关。传统的幅度补偿方法采用固定系数,在宽温度范围内易造成模态频率匹配控制的失稳。
技术实现思路
1、发明目的:本发明的目的是提供一种基于边带幅度在线补偿的mems速率陀螺仪模态频率匹配方法及系统,在保证陀螺仪驱动模态和检测模态闭环的前提下,对边带信号进行在线补偿,从而提高了模态频率匹配精度,改善陀螺仪角速度输出信号的信噪比,提高陀螺仪的静态性能。
2、技术方案:本发明的一种基于边带幅度在线补偿的mems速率陀螺仪模态频率匹配方法,包括以下步骤:
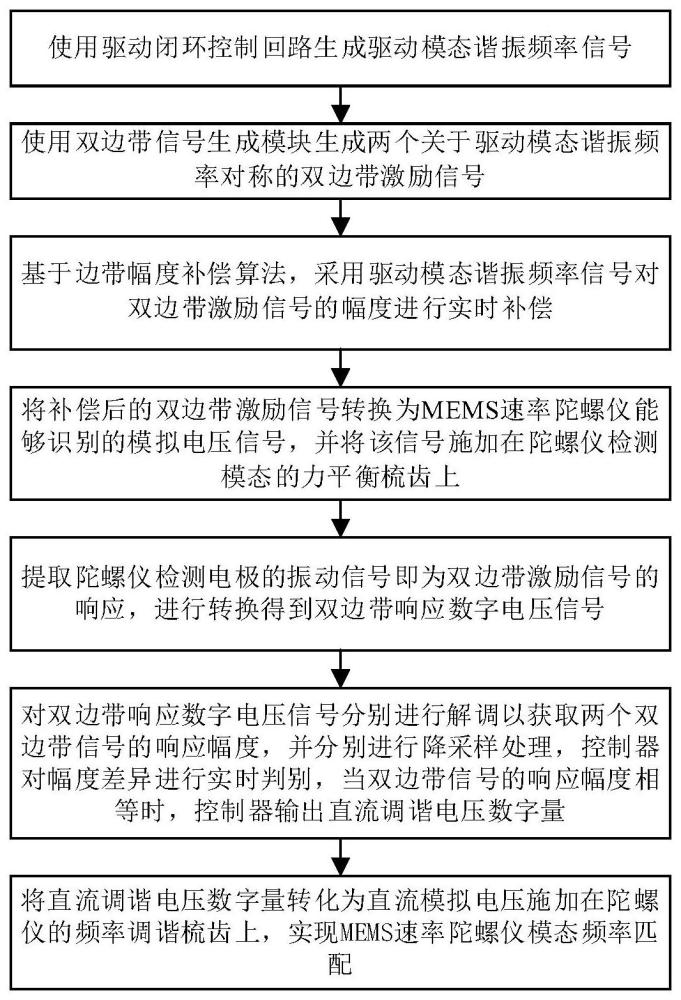
3、s1、使用驱动闭环控制回路生成驱动模态谐振频率信号;
4、s2、使用双边带信号生成模块生成两个关于驱动模态谐振频率对称的双边带激励信号;
5、s3、基于边带幅度补偿算法,采用驱动模态谐振频率信号对双边带激励信号的幅度进行实时补偿;
6、s4、将补偿后的双边带激励信号转换为mems速率陀螺仪能够识别的模拟电压信号,并将该信号施加在陀螺仪检测模态的力平衡梳齿上;
7、s5、提取陀螺仪检测电极的振动信号即为双边带激励信号的响应,经过位移电容转化、电容电压转换以及差分放大后得到双边带响应模拟信号,并将双边带响应模拟信号转换为双边带响应数字电压信号;
8、s6、对双边带响应数字电压信号分别使用两个数字解调器进行解调以获取两个双边带信号的响应幅度,并分别使用抽取滤波器对解调后的两个双边带信号的响应幅度进行降采样处理,两个降采样后的双边带信号的响应幅度相减得到双边带信号幅度差异,控制器对幅度差异进行实时判别,当双边带信号的响应幅度相等时,即达到模态频率匹配状态,控制器输出直流调谐电压数字量;
9、s7、将直流调谐电压数字量转化为直流模拟电压施加在陀螺仪的频率调谐梳齿上,实现mems速率陀螺仪模态频率匹配。
10、进一步的,步骤s1中驱动闭环控制回路采用自动增益控制和锁相环技术,实时跟踪mems速率陀螺仪的驱动模态谐振频率信号,使得mems速率陀螺仪在驱动模态做恒幅锁频振动,输出驱动模态谐振频率的信号。
11、进一步的,步骤s1中驱动闭环控制回路包括:mems速率陀螺仪驱动谐振器、第一位移电容转换器、第一电容电压转换器、第一仪表放大器、驱动模态a/d转换器、第一数字解调器、第一抽取滤波器、第二抽取滤波器、第一pi控制器、第二pi控制器、第一直接数字式频率合成器、驱动模态d/a转换器和电压位移转换器;驱动力施加给mems速率陀螺仪驱动谐振器得到驱动读出位移信号,依次经过第一位移电容转换器、第一电容电压转换器、第一仪表放大器和驱动模态a/d转换器后转化为驱动读出数字电压信号,然后经过第一数字解调器分别得到驱动读出数字电压信号的幅度信息和相位信息,幅度信息和相位信息分别经过第一抽取滤波器和第二抽取滤波器后,幅度信息经过第一pi控制器得到期望驱动力幅度,相位信息经过第二pi控制器后得到表征频率变化量输出至第一直接数字式频率合成器最终输出驱动模态谐振频率的数字正弦信号,驱动模态谐振频率的数字正弦信号一路输出用于补偿双边带激励信号的幅度,另一路输出与期望驱动力幅度相乘后作为驱动数字信号,驱动数字信号经过驱动模态d/a转换器转换为驱动模拟电压信号后经过电压位移转换器施加给陀螺仪完成闭环驱动。
12、进一步的,步骤s2中双边带信号生成模块包括两个直接数字式频率合成模块(dds),分别生成sin[(ωd+ωdem)t]、cos[(ωd+ωdem)t]和sin[(ωd-ωdem)t]、cos[(ωd-ωdem)t]信号,其中正弦信号作为双边带激励信号施加给陀螺仪,正弦信号和余弦信号均作为后续最小均方解调的解调基准信号,ωd为驱动模态的谐振频率,ωdem为边带信号频率,t为时间。
13、进一步的,步骤s3中基于边带幅度补偿算法,采用驱动模态谐振频率信号对双边带激励信号的幅度进行实时补偿,补偿方法为:
14、
15、其中,adem1为上边带幅度,adem2为下边带幅度,n1为驱动频率控制字,n2为边带频率控制字。
16、进一步的,步骤s6中数字解调器为最小均方数字解调器,其采用最小均方算法对双边带响应数字电压信号进行解调以获取双边带信号的响应幅度。
17、进一步的,步骤s6具体为:
18、将双边带响应数字电压信号分别输入第二数字解调器和第三数字解调器进行数字解调后得到两个双边带响应幅度,其中边带激励正余弦信号同时作为解调基准,两个双边带响应幅度信号分别输入第三抽取滤波器、第四抽取滤波器进行降采样处理,然后根据判断算法判别,当两个双边带响应幅度信号的幅度相等时,达到模态频率匹配,使用第三pi控制器根据判别结果输出直流调谐数字电压。
19、本发明的一种基于边带幅度在线补偿的mems速率陀螺仪模态频率匹配系统,包括:驱动闭环控制回路、调谐闭环控制回路、双边带信号生成模块和边带幅度补偿模块,其中:
20、驱动闭环控制回路,用于生成驱动模态谐振频率信号;
21、双边带信号生成模块,用于生成两个关于驱动模态谐振频率对称的双边带激励信号;
22、边带幅度补偿模块,用于基于边带幅度补偿算法,采用驱动模态谐振频率信号对双边带激励信号的幅度进行实时补偿;
23、调谐闭环控制回路包括检测模态输入模块、检测模态输出模块、频率匹配模块和频率调谐模块,其中,
24、检测模态输入模块,用于将补偿后的双边带激励信号转换为mems速率陀螺仪能够识别的模拟电压信号,并将该信号施加在陀螺仪检测模态的力平衡梳齿上;
25、检测模态输出模块,用于提取陀螺仪检测电极的振动信号即为双边带激励信号的响应,经过位移电容转化、电容电压转换以及差分放大后得到双边带响应模拟信号,并将双边带响应模拟信号转换为双边带响应数字电压信号;
26、频率匹配模块,用于对双边带响应数字电压信号分别使用两个最小均方算法进行解调以获取两个双边带信号的响应幅度,并分别使用抽取滤波器对解调后的两个双边带信号的响应幅度进行降采样处理,两个降采样后的双边带信号的响应幅度相减得到双边带信号幅度差异,控制器对幅度差异进行实时判别,当双边带信号的响应幅度相等时,即达到模态频率匹配状态,控制器输出直流调谐电压数字量;
27、频率调谐模块,用于将直流调谐电压数字量转化为直流模拟电压施加在陀螺仪的频率调谐梳齿上,实现mems速率陀螺仪模态频率匹配。
28、本发明的一种电子设备,所述设备包括:
29、存储有可执行程序代码的存储器;
30、与所述存储器耦合的处理器;
31、所述处理器调用所述存储器中存储的所述可执行程序代码,执行如上述的基于边带幅度在线补偿的mems速率陀螺仪模态频率匹配方法的步骤。
32、本发明的一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令被调用时,用于执行如上述的基于边带幅度在线补偿的mems速率陀螺仪模态频率匹配方法的步骤。
33、有益效果:与现有技术相比,本发明的优点为:
34、(1)基于边带幅度在线补偿,可以在理论上消除边带幅度差异导致mems速率陀螺仪模态频率失配,提升陀螺仪的模态频率匹配精度,提高了陀螺仪静态性能。
35、(2)规避了传统定值补偿系数在宽温度范围内模态频率匹配控制易失稳的缺点,提高了模态频率匹配控制的鲁棒性。
36、(3)本发明采用最小均方数字解调方式,通过两路解调输出平方和开根号后直接得到边带幅度响应,从原理上消除了边带相应相位不一致所引起的调谐误差。
- 还没有人留言评论。精彩留言会获得点赞!