一种无人船多传感器数据融合的导航系统
本发明涉及导航系统,尤其涉及一种无人船多传感器数据融合的导航系统。
背景技术:
1、水面无人船导航是研究水面无人船技术的重要内容,在水面无人船的应用中发挥着不可替代的作用,无人船导航就是无人船在外界环境中移动时,利用相关的传感器获取无人船的位置和姿态信息,无人船的姿态信息获取是实现无人船的基本运动以及智能运动的关键,是保证海洋作业、海洋任务等安全进行的必要保证;
2、传感器导航多种多样,惯性导航的原理是通过牛顿力学定律对惯性测量器件进行导航解算,得到载体的姿态。优点是精度高,不易受环境干扰,缺点是误差会随时间积累,不能长期有效导航;全球导航卫星系统,它的基本原理是通过轨道卫星提供的载波、伪距等信息得到载体姿态,优点是不存在积累误差,缺点是易受环境干扰,所以,单一的导航系统已经不能满足人们的需求,多传感器组合导航技术应运而生;
3、现阶段,国内外对于无人船姿态获取的研究主要集中于组合导航技术,组合导航技术就是利用多个传感器的信息应用数据融合算法得到更高精度的载体姿态信息,然而,现有的技术存在以下不足:
4、第一,多种传感器的使用会使得噪声更加多样和复杂,目前通常使用的方法并没有考虑传感器测量数据的噪声干扰问题,导致导航数据不够精确;
5、第二,现有无人船导航系统姿态获取的数据融合算法主要集中在与卡尔曼滤波器设计相关的方面,存在各种传感器的参数表达不明确等缺点,造成数据融合困难,互相配合的导航出现偏差,因此,本发明提出一种无人船多传感器数据融合的导航系统以解决现有技术中存在的问题。
技术实现思路
1、针对上述问题,本发明提出一种无人船多传感器数据融合的导航系统,该无人船多传感器数据融合的导航系统统一描述时空数据集中的空间关系、时间关系、光谱特征、人文属性和区域属性,以相似性作为描述准则构建统一的时空元数据表达式,综合时间分辨率、空间分辨率、光谱分辨率和地理标识,从而使得多个定位用传感器的参数表达统一,并以属性重要级别为基准分析剩余数据的相关性,确定导航决策,避免出现偏差。
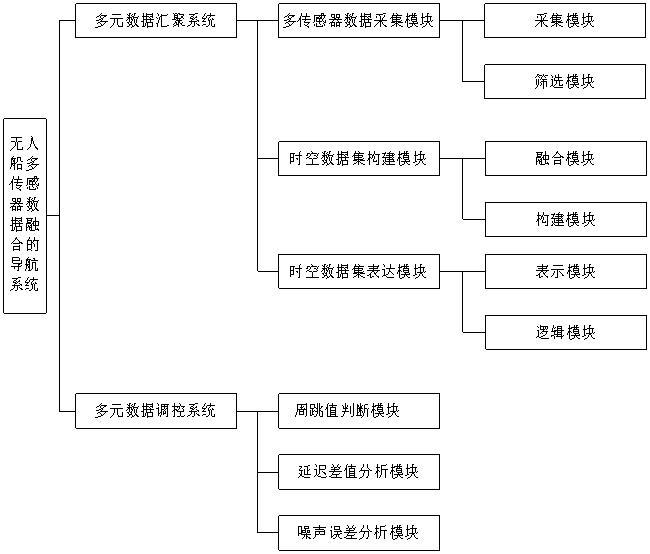
2、为实现本发明的目的,本发明通过以下技术方案实现:一种无人船多传感器数据融合的导航系统,包括多元数据汇聚系统和多元数据调控系统,所述多元数据汇聚系统包括多传感器数据采集模块、时空数据集构建模块、时空数据集表达模块,所述数据调控系统包括周跳值判断模块、延迟差值分析模块和噪声误差分析模块;
3、所述周跳值判断模块用于对多个定位用传感器的定位数据进行周跳判断,计算周跳值对数据值的影响,以此消除影响,所述延迟差值分析模块用于分析多个定位用传感器接收卫星数据的频段数据,分析干扰,确定延迟差值,进行补偿,所述噪声误差分析模块用于建立随机噪声的线性离散动态系统数学模型,带入对多个定位用传感器的定位数据,运用卡尔曼滤波算法,应用区间运算,修正数学模型的噪声误差;
4、所述多传感器数据采集模块用于判断分析,并筛选采集经过数据调控系统调控后,多个定位用传感器中具有时间关系与空间关系的数据;所述时空数据集构建模块将采集的数据进行融合,构建时空元数据的数据结构形式,接着以gnss接收系统的秒脉冲信号为统一基准,在可信建模中将来自各个定位用传感器的数据进行时间戳配准,构成时空数据集;所述时空数据集表达模块用于统一描述时空数据集中的空间关系、时间关系、光谱特征、人文属性和区域属性,以相似性构建统一的时空元数据表达式,接着以属性重要级别为基准分析各个定位用传感器的剩余数据的相关性,生成逻辑关系,输出最终导航决策。
5、进一步改进在于:所述多传感器数据采集模块包括采集模块和筛选模块,所述采集模块连接多个定位用传感器,获取定位数据。
6、进一步改进在于:所述筛选模块用于对采集的定位数据进行数据组织,利用常规关键字索引、副关键字索引和空间索引,引发时空大数据,然后对时空大数据进行筛选估计,筛选出多个定位用传感器中具有时间关系与空间关系的数据,排除无关时空的冗余和重复数据。
7、进一步改进在于:所述时空数据集构建模块包括融合模块和构建模块,所述融合模块用于将将采集的数据进行融合,根据时空观测、事件相应和时空特征来对数据进行系统估计,构建时空元数据的数据结构形式,即空间关系a、时间关系b、光谱特征c、人文属性d和区域属性e,确定时空数据在共享与应用中置信度水平,协调时空系统应用中的因数分配。
8、进一步改进在于:所述构建模块以gnss接收系统的秒脉冲信号为统一基准,在可信建模中将来自各个定位用传感器的数据进行时间戳配准,将时间戳标识配准下的时空数据构成向量t,则各个定位用传感器的数据在l时刻下的大数据向量表达式为tl=(al,bl,cl,dl,el),最终构成时空数据集。
9、进一步改进在于:所述时空数据表达模块包括表示模块和逻辑模块,所述表示模块用于根据多个定位用传感器的设备属性进行区分式表示,构成的表示式囊括属于该定位用传感器的测量值和空间、时间坐标,接着统一描述时空数据集中多个定位用传感器数据的空间关系a、时间关系b、光谱特征c、人文属性d和区域属性e,以相似性作为描述准则,构建统一的时空元数据表达式:spatio-temporal metadata=f{a总,b总,c总,d总,e总},综合时间分辨率、空间分辨率、光谱分辨率和地理标识。
10、进一步改进在于:所述逻辑模块根据多个定位用传感器数据的准确度以及可靠属性,分析除了统一的时空元数据表达式之外的元数据,根据属性重要性、属性不确定性、属性表一致性和属性可靠性,来判断该类数据的相关性,评估数据结构中的绝对不确定性和相对不确定性,采用最小决策和分类算法指导不确定时空数据分类、模糊边界划分,实现表示与处理同时含有多种空间、时相、光谱及其拓扑与映射逻辑关系,评估其必要性,最终确定导航决策。
11、进一步改进在于:所述周跳值判断模块采用如下平滑算法进行周跳判断:
12、
13、式中:为宽巷模糊度的平均值;k和k-1分别表示当前历元和前一历元;σ2为宽巷模糊度的方差,当周跳发生时,宽巷模糊度将发生跳变,据此可判断是否发生周跳,周跳判断式如下:
14、
15、当nwl(k)满足式(2)时,则认为历元k发生了周跳,接着计算原始载波相位观测值的周跳,消除影响。
16、进一步改进在于:所述延迟差值分析模块接入定位用传感器数据网站,获取相应定位用传感器的数据频段,判断相互间的频段是否存在干扰,当存在干扰时,根据不同频段之间的干扰程度,计算干扰造成的延迟差值,对数据进行补偿。
17、进一步改进在于:所述噪声误差分析模块建立随机噪声的线性离散动态系统数学模型,表示式为:
18、
19、其中和分别为状态向量和观测向量,分别为状态转移矩阵,噪声状态转移矩阵,观测转移矩阵,{wk-1}为系统误差序列,{vk}为观测误差序列、两个序列独立的高斯白噪声,qk≥0为系统噪声方差矩阵,由此带入对多个定位用传感器的定位数据,运用卡尔曼滤波算法,应用区间运算,修正数学模型的噪声误差。
20、本发明的有益效果为:
21、1、本发明将采集的多个传感器的数据进行融合,以gnss接收系统的秒脉冲信号为统一基准,在可信建模中将来自各个定位用传感器的数据进行时间戳配准,统一描述时空数据集中的空间关系、时间关系、光谱特征、人文属性和区域属性,以相似性作为描述准则构建统一的时空元数据表达式,综合时间分辨率、空间分辨率、光谱分辨率和地理标识,从而使得多个定位用传感器的参数表达统一,并以属性重要级别为基准分析剩余数据的相关性,确定导航决策,避免出现偏差。
22、2、本发明对多个定位用传感器的定位数据进行周跳判断,计算周跳值对数据值的影响并消除,分析多个定位用传感器接收卫星数据的频段数据的干扰,确定延迟差值并补偿,并建立随机噪声的线性离散动态系统数学模型,带入对多个定位用传感器的定位数据,运用卡尔曼滤波算法,应用区间运算,修正数学模型的噪声误差,使得后续融合的数据更加准确,提高导航精准度。
- 还没有人留言评论。精彩留言会获得点赞!