一种适用于环形交叉口的自动驾驶路径规划方法
本发明涉及自动驾驶汽车决策控制,尤其涉及环形交叉口场景下的自动驾驶路径规划方法。
背景技术:
1、在结构化城市道路中,自动驾驶车辆通常基于以车道中心线为参考的frenet坐标系(s-l坐标系)描述车辆的运动与跟踪控制。然而,车辆在驶入与驶出环形交叉口时,并没有完整的车道线作为指引。因此,自动驾驶车辆需要基于自身感知系统或高精地图构建虚拟的车道中心线为规划和控制提供参考。
2、同时,虚拟车道中心线(s线)的连续性与平顺性也会影响自动驾驶车辆的控制性能。路径的舒适性取决于其连续性(即平滑性),连续性包括几何连续与参数连续。由于导数的严格约束,参数连续性不允许灵活的曲线参数化。相比之下,几何连续性施加的约束适应了相邻曲线段参数化之间的差异,因此通常使用几何连续性来平滑路径。常见的几何连续包括位置连续、切向连续和曲率连续。
3、在环形交叉口场景中,方向盘转角处于一个连续变化的过程,当车辆高速行驶至曲率不连续处,会导致较高的方向盘转速,在造成较大加速度变化(jerk)使人感到不舒适的同时,也给自动驾驶车辆造成较大的跟踪误差。
4、因此,需要一种更加适用于环形交叉口的自动驾驶路径规划方法,可以提高自动驾驶车辆驶入与驶出环形交叉口时的安全性和舒适性。
技术实现思路
1、为了解决现有技术中存在的不足,本发明提供一种适用于环形交叉口的自动驾驶路径规划方法,旨在实现自动驾驶车辆驶入与驶出环形交叉口时的安全性、舒适性以及效率。
2、本发明所采用的技术方案如下:
3、一种适用于环形交叉口场景的自动驾驶路径规划方法,包括以下步骤:
4、判断自动驾驶车辆的决策任务是否需要绕中心岛行驶;
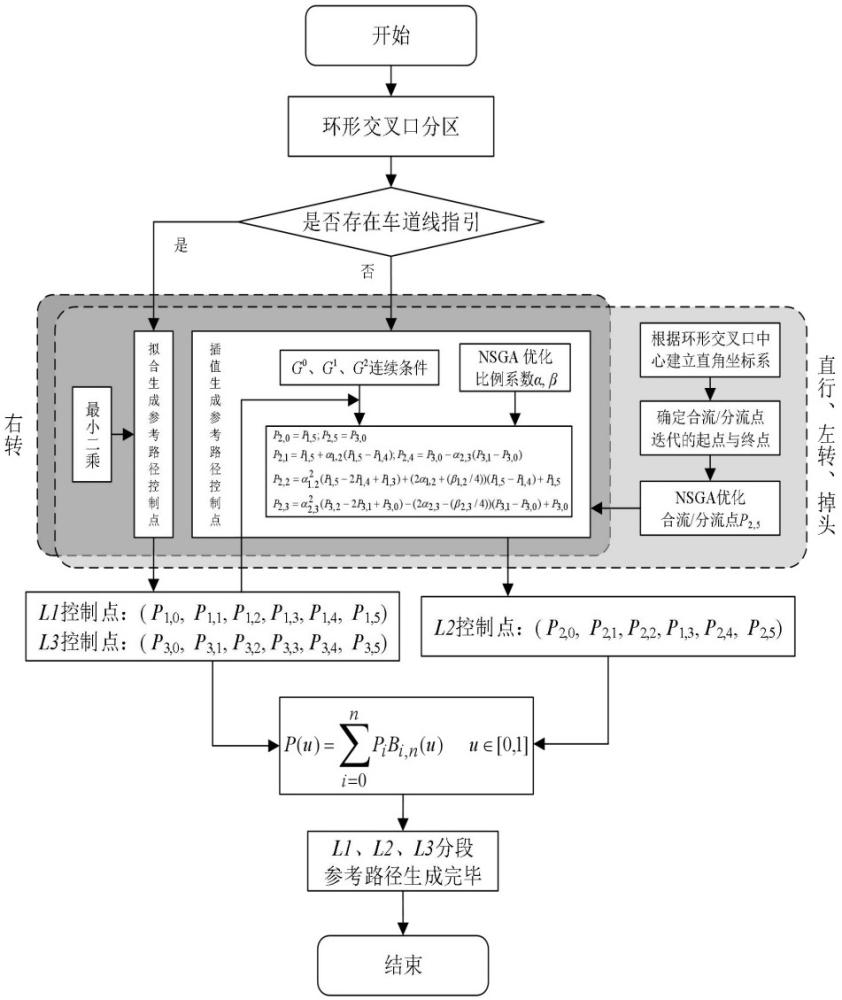
5、若自动驾驶车辆的决策任务不需要绕中心岛行驶,生成路径的过程为:
6、s2.1、针对车道两侧存在车道线引导的驶入路段和驶出路段,均采用拟合的方法生成拟合五次bezier参考路径l1和l3;
7、s2.2、针对车道两侧不存在车道线引导的环岛区域,则基于连续性条件和s1.1生成的拟合五次bezier参考路径l1和l3,采用插值的方法生成插值五次bezier参考路径l2;
8、s2.3、将s2.1和s2.2生成的拟合五次bezier参考路径l1和l3与插值五次bezier参考路径l2按照行驶顺序依次连接,构成该决策任务对应的自动驾驶参考路径;
9、若自动驾驶车辆的决策任务需要绕中心岛行驶,生成路径的过程为:
10、s3.1、针对车道两侧存在车道线引导的驶入路段,采用拟合的方法生成拟合五次bezier参考路径l1;
11、s3.2、以沿中心岛绕行的起点为合流点;设合流点在目标循环车道的道路中心线上,且优化迭代方向与交通流方向相同;沿着目标循环中心线优化迭代出理想的合流点;
12、s3.3、基于合流点,针对车道两侧存在车道线引导的中心岛绕行段,采用拟合的方法生成拟合五次bezier参考路径l3;
13、s3.4、基于s2.1中驶入路段的拟合五次bezier参考路径l1和l3与连续性条件,采用插值的方法生成驶入路段和中心岛绕行段之间的插值五次bezier参考路径l2;
14、s3.5、按照行驶顺序依次连接s3.1- s3.4中的参考路径l1、l2和l3,得到驶入环形交叉口的参考路径;
15、s3.6、驶出环形交叉口是驶入环形交叉口的镜像行为,参考s3.1- s3.5得到驶出环形交叉口的参考路径,构成该决策任务对应的自动驾驶参考路径。
16、进一步,采用拟合生成参考路径的方法是:根据两侧车道线计算道路中心点,采用最小二乘法对离散的道路中心点进行拟合,反算出五次bezier曲线的控制点,再根据控制点正算出拟合五次bezier参考路径。
17、进一步,采用插值生成参考路径的方法是:基于已经确定的拟合五次bezier参考路径,由于插值五次bezier参考路径两端控制点与其两端已经确定的拟合五次bezier参考路径的端点重合且满足连续性条件,由此构建插值五次bezier参考路径的控制点,获得插值五次bezier参考路径。
18、进一步,所述连续性条件是指满足 g0、 g1、 g2连续性。
19、进一步,优化迭代出理想的合流点或分流点的方法为:
20、以环形交叉口的中心为原点,建立环形交叉口全局坐标系;
21、以驶入路段的拟合五次bezier参考路径l1上最后一个控制点 p1,5点处的切线与目标循环车道中心线的交叉点 p*2,5为迭代的起点; p*2,5是车辆保持其当前航向通过驶入线并行驶到目标循环车道中心线的地点;
22、 p1,5到 p*2,5的线段为最小成本路径;
23、 p*2,5与坐标系原点的连线与x轴之间的夹角为迭代初始角θ;
24、以 p*2,5为迭代起点,沿着目标循环中心线优化迭代出理想的偏转角度, ∈[0,π/2]。
25、进一步,将合流点、分流点、高阶连续性的比例系数的优化过程中的多个约束条件概括多目标优化问题,表示如下:
26、其中,为相对路径长度,是路径曲率峰值绝对值的总和;是路径曲率一阶导数峰值绝对值的总和;是路径曲率二阶导数峰值绝对值的总和;均为高阶连续性的比例系数;∆为偏转角度; k是路径的曲率,是路径的曲率的变化率;为最小转弯半径的倒数;为最大曲率率。
27、进一步,是参考路径生成的四个评价指标,分别表示如下:
28、其中,相对路径长度为真实路径与最小成本路径之间的差值;是路径曲率峰值绝对值的总和;是路径曲率一阶导数峰值绝对值的总和;是路径曲率二阶导数峰值绝对值的总和。
29、进一步,采用nsga对多个约束条件形成的多目标优化问题进行求解。
30、进一步,五次bezier曲线的数学表达式为:其中,表示决策任务涉及的行驶区域 a的bezier曲线;是区域 a中bezier曲线的第 i个控制点, i = 0,1, 2, ..., 5;函数的输入 u∈[0,1]决定bezier曲线从起点到终点的位置比例; b i,5 (u)是5次bezier曲线上第 i个控制点的伯恩斯坦多项式。
31、进一步,五次bezier曲线上的一个伯恩斯坦多项式表示如下:其中,为5的阶乘,为 i的阶乘, i为控制点的序号。
32、与现有技术相比,其具有如下优势:
33、本发明提供的环形交叉口参考路径规划方法,根据环形交叉口内道路两侧是否存在车道指引线的情况,利用五次bezier曲线,分别采用拟合与基于高阶连续性的差值方法分段生成参考路径。基于环形交叉口的几何特征、车辆转向执行器限制、相对路径长度与路径平顺性等约束条件,设计参考路径的优化函数求解连续性比例系数与车辆合流/分流点位置,解决了自动驾驶车辆驶入/驶出环形交叉口满足高效性、平顺性与舒适性的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!