激光点云噪点生成方法及装置、电子设备、存储介质与流程
本公开涉及数据处理领域,尤其涉及点云数据处理,公开了一种激光点云噪点生成方法及装置、电子设备、存储介质。
背景技术:
1、激光雷达(lidar)点云中的噪点是指在数据采集过程中,由于非有效目标反射或系统自身误差导致的不准确或错误的数据点。这些噪点的存在会影响对环境三维模型的精确构建以及基于点云数据的目标检测、跟踪和识别性能。
2、激光雷达点云中噪点的自动生成通常是为了模拟实际场景中可能出现的数据噪声,以便测试和验证去噪算法的效果。在研发阶段或学术研究中,可能需要生成包含不同类型的噪点的点云数据集来评估算法在各种噪声条件下的鲁棒性。
3、现有技术主要集中在噪点的自动识别和提取上,对于模拟点云噪点自动生成的相关方案较少。
技术实现思路
1、本公开至少提供了一种激光点云噪点生成方法及装置、电子设备、存储介质,以自动生成不同类型的噪点。
2、根据本公开的一方面,提供了一种激光点云噪点生成方法,包括:
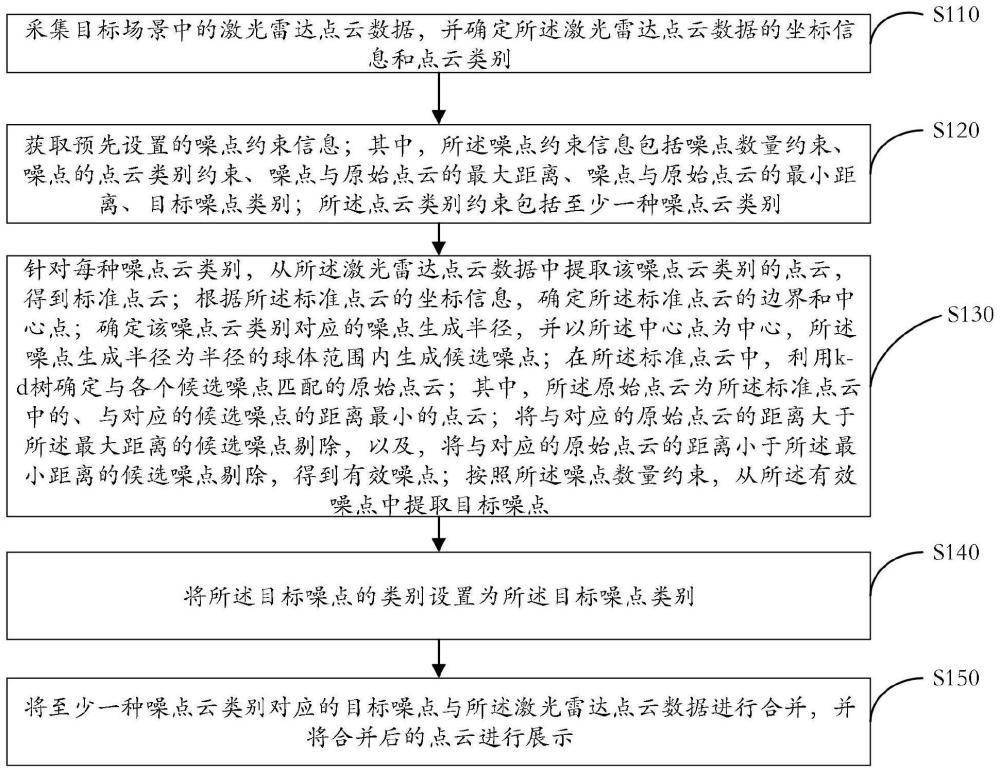
3、采集目标场景中的激光雷达点云数据,并确定所述激光雷达点云数据的坐标信息和点云类别;
4、获取预先设置的噪点约束信息;其中,所述噪点约束信息包括噪点数量约束、噪点的点云类别约束、噪点与原始点云的最大距离、噪点与原始点云的最小距离、目标噪点类别;所述点云类别约束包括至少一种噪点云类别;
5、针对每种噪点云类别,从所述激光雷达点云数据中提取该噪点云类别的点云,得到标准点云;根据所述标准点云的坐标信息,确定所述标准点云的边界和中心点;确定该噪点云类别对应的噪点生成半径,并以所述中心点为中心,所述噪点生成半径为半径的球体范围内生成候选噪点;在所述标准点云中,利用k-d树确定与各个候选噪点匹配的原始点云;其中,所述原始点云为所述标准点云中的、与对应的候选噪点的距离最小的点云;将与对应的原始点云的距离大于所述最大距离的候选噪点剔除,以及,将与对应的原始点云的距离小于所述最小距离的候选噪点剔除,得到有效噪点;按照所述噪点数量约束,从所述有效噪点中提取目标噪点;
6、将所述目标噪点的类别设置为所述目标噪点类别;
7、将至少一种噪点云类别对应的目标噪点与所述激光雷达点云数据进行合并,并将合并后的点云进行展示。
8、在一种可能的实施方式中,所述确定该噪点云类别对应的噪点生成半径,包括:
9、根据所述噪点云类别对应的标准点云的边界,确定该噪点云类别对应的噪点生成半径。
10、在一种可能的实施方式中,所述按照所述噪点数量约束,从所述有效噪点中提取目标噪点,包括:
11、在所述有效噪点的数量大于所述噪点数量约束对应的目标数量的情况下,通过随机抽样的方式,提取所述目标数量个目标噪点。
12、在一种可能的实施方式中,上述方法还包括:
13、利用所述候选噪点和所述标准点云,生成噪点云类别对应的k-d树。
14、在一种可能的实施方式中,所述标准点云的边界包括在所述球体的边界里面。
15、在一种可能的实施方式中,上述方法还包括:
16、将至少一种噪点云类别对应的目标噪点的坐标,与所述激光雷达点云数据的坐标进行合并,得到包含噪点的点云数据集。
17、在一种可能的实施方式中,所述从所述激光雷达点云数据中提取该噪点云类别的点云,得到标准点云,包括:
18、根据所述激光雷达点云数据的点云类别,从所述激光雷达点云数据中提取该噪点云类别的点云,得到标准点云。
19、根据本公开的另一方面,提供了一种激光点云噪点生成装置,包括:
20、第一预处理模块,用于采集目标场景中的激光雷达点云数据,并确定所述激光雷达点云数据的坐标信息和点云类别;
21、第二预处理模块,用于获取预先设置的噪点约束信息;其中,所述噪点约束信息包括噪点数量约束、噪点的点云类别约束、噪点与原始点云的最大距离、噪点与原始点云的最小距离、目标噪点类别;所述点云类别约束包括至少一种噪点云类别;
22、噪点生成模块,用于针对每种噪点云类别,从所述激光雷达点云数据中提取该噪点云类别的点云,得到标准点云;根据所述标准点云的坐标信息,确定所述标准点云的边界和中心点;确定该噪点云类别对应的噪点生成半径,并以所述中心点为中心,所述噪点生成半径为半径的球体范围内生成候选噪点;在所述标准点云中,利用k-d树确定与各个候选噪点匹配的原始点云;其中,所述原始点云为所述标准点云中的、与对应的候选噪点的距离最小的点云;将与对应的原始点云的距离大于所述最大距离的候选噪点剔除,以及,将与对应的原始点云的距离小于所述最小距离的候选噪点剔除,得到有效噪点;按照所述噪点数量约束,从所述有效噪点中提取目标噪点;
23、类别设定模块,用于将所述目标噪点的类别设置为所述目标噪点类别;
24、合并展示模块,用于将至少一种噪点云类别对应的目标噪点与所述激光雷达点云数据进行合并,并将合并后的点云进行展示。
25、根据本公开的另一方面,提供了一种电子设备,包括存储器、处理器及存储在存储器上的计算机程序,所述处理器在执行所述计算机程序时实现上述任一项所述的方法。
26、根据本公开的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项所述的方法。
27、本公开的激光点云噪点生成方案,首先采集目标场景中的激光雷达点云数据,并确定所述激光雷达点云数据的坐标信息和点云类别;之后,获取预先设置的噪点约束信息;其中,所述噪点约束信息包括噪点数量约束、噪点的点云类别约束、噪点与原始点云的最大距离、噪点与原始点云的最小距离、目标噪点类别;所述点云类别约束包括至少一种噪点云类别;之后,针对每种噪点云类别,从所述激光雷达点云数据中提取该噪点云类别的点云,得到标准点云;根据所述标准点云的坐标信息,确定所述标准点云的边界和中心点;确定该噪点云类别对应的噪点生成半径,并以所述中心点为中心,所述噪点生成半径为半径的球体范围内生成候选噪点;在所述标准点云中,利用k-d树确定与各个候选噪点匹配的原始点云;其中,所述原始点云为所述标准点云中的、与对应的候选噪点的距离最小的点云;将与对应的原始点云的距离大于所述最大距离的候选噪点剔除,以及,将与对应的原始点云的距离小于所述最小距离的候选噪点剔除,得到有效噪点;按照所述噪点数量约束,从所述有效噪点中提取目标噪点;将所述目标噪点的类别设置为所述目标噪点类别;最后,将至少一种噪点云类别对应的目标噪点与所述激光雷达点云数据进行合并,并将合并后的点云进行展示。本公开通过目标场景中的激光雷达点云数据以及噪点约束信息,能够在保持一定空间分布规律的基础上,生成多种类型的点云,大大减少了实际外业工作量,生成的点云噪点能够支持各项应用。
28、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!