未知非结构化环境下的地面机器人自主导航方法及系统与流程
本发明涉及机器人控制领域,具体涉及未知非结构化环境下的地面机器人自主导航方法及系统。
背景技术:
1、地面机器人已广泛应用服务业,工业,军事等众多领域,而目前的机器人导航技术主要面向已知地图,结构化较好的环境,而对于地面情况复杂的非结构化的未知环境下的自主导航技术尚未得到充分的开发与研究.对于如地下洞穴探索,灾后救援都有着实际的需求。
2、公布号为cn117246425a的现有发明专利申请文献《四足机器人导航避障与攀爬楼梯方法及系统》,该现有方法包括:步骤s1:建立四足机器人预设非结构化环境场景模型;步骤s2:机载双目相机获取并分析周围环境信息,建立包含语义信息的全局地图及以机器人为中心的高精度局部高程地图;步骤s3:四足机器人根据全局地图和a*路径规划算法实现四足机器人自主导航避障;步骤s4:四足机器人根据非对称actor-critic网络训练,并结合全局地图和局部高程地图规划落足点,从而实现四足机器人运动控制和攀爬楼梯。
3、前述现有技术基于语义地图的构建实现了在已知的非结构化场景下四足式机器人自主导航,烦该现有方案无法适应未知环境下的导航,并且采用强化学习构建语义地图,需要提前进行数据训练,复杂度高且鲁棒性较差;另外使用高程图作为应对非结构化环境的地形建模处理手段,仅考虑的地形高度,仅对楼梯场景比较好的效果,对于非平坦地貌适应性差,可知,该现有方法仍存在局限性.
4、以及公布号为cn116300905a的现有发明专利申请文献《一种基于二维激光观测的带约束多机器人强化学习安全编队方法》,该现有方法包括:首先通过编队内部通讯以及各编队成员的传感器信息进行环境综合感知,结合队形要求和机器人数目等因素初步规划多机器人的编队目标点。各编队成员利用基于强化学习的导航规划方法,根据个体观测与队内共享信息生成初步控制指令,在控制障碍函数的引导下进一步优化,使得最终控制指令满足安全约束,保证机器人运行的安全性。该现有方法侧重于多机器人编队技术,无法在未知非结构化环境下实现地面机器人自主导航。
5、综上,现有技术存在未知非结构化环境下的地面机器人自主导航难度较大的技术问题。
技术实现思路
1、本发明所要解决的技术问题在于:如何解决现有技术中未知非结构化环境下的地面机器人自主导航难度较大的技术问题。
2、本发明是采用以下技术方案解决上述技术问题的:未知非结构化环境下的地面机器人自主导航方法包括:
3、s1、利用环境建模模块规划输入接口,以接收地面机器人采集的感知定位信息、配准后点云数据,以进行点云数据建模,构建得到环境模型,更新esdf地图;
4、s2、利用地形滤波模块,根据机器人的地形信息,获取地形栅格约束,据以进行地形滤波;
5、s3、利用地形分析模块,在非结构化环境下进行地形分析,得到地形几何信息、地面粗糙度、地形表面变化程度、倾斜度以及地形点云稀疏性,据以综合评估,选取最高通过性路径;
6、s4、利用路径规划模块,根据地形栅格约束、esdf地图进行astar搜索,以根据得到最高通过性路径处理得到求取全局平滑路径。
7、在更具体的技术方案中,步骤s1中,根据配准后点云信息,确定地面机器人建模范围,根据建模范围的三维栅格地图进行建模操作,标记每个栅格的栅格状态。
8、本发明利用地形滤波模块针对地面机器人所特有的地形信息滤波,提高了三维环境下的路径规划效率。同时保证三维环境进行栅格建模效率,同时利用地面机器人的硬约束即机器人必须紧贴地面运动,缩小了路径规划的待选栅格范围,实现了未知非结构化环境下的地面机器人自主导航。
9、在更具体的技术方案中,步骤s1包括:
10、s11、根据配准后点云数据,得到点云所在栅格索引,据以设定对应栅格为占用状态,将超出全局环境的三维栅格地图的栅格设定为未知状态,将其余栅格标记为可行状态;
11、s12、利用欧几里得距离转换edt算法,更新全局环境的esdf地图。
12、在更具体的技术方案中,步骤s2中,利用下述逻辑的地形栅格约束:
13、
14、在更具体的技术方案中,步骤s3包括:
15、s31、求取局部区域的拟合平面法向量,据以计算平面方向,据以处理得到地形粗糙度;
16、s32、获取局部区域的点云协方差特征,据以分析得到地形表面变化程度,其中,地形表面变化程度包括:点云三维度变化情况指示信息以及局部表面变化程度情况评测信息;
17、s33、对地面机器人的运动区域进行倾斜度分析;
18、s34、对地面机器人探测范围内的栅格,基于调整权重,并利用svd法拟合栅格的风险地形信息,以得到风险规避数据,根据探测范围内的地面栅格比例评估地形点云稀疏性。
19、本发明在非结构化环境中,针对传统室内导航具有局限性的问题,通过分析地形几何信息,分析地面的粗糙度,倾斜度等指标,在综合评估选择通过性最高的路径,优化了非结构化环境导航效果。
20、传统的室内自主导航规划,采用2d栅格地图对环境进行建模,每个栅格仅三种状态即占用、空闲、未知,也即默认地面是平坦的,即仅有平面和障碍物.而实际应用场景下,机器人所面临的场景是多样且复杂的,尤其是室外导航所面对环境更多是非结构化的,地面崎岖不平的,即认为机器人所在地面具有一定坡度或者地面具有上的高度波动或者有坑、沟地形。因此,在对环境进行建模时应采用更科学的方法,应对地面上某一个点的一定范围内的表面进行可通性分析,确定其通行的代价.此外,本方案的导航算法无需先验地图,因此可应用于未知环境下的自主导航。
21、在更具体的技术方案中,步骤s31还包括:
22、s311、粗糙度roughness的计算,首先拟合每个地面栅格附近以机器人外接圆范围的平面,对其中的点云进行去中心化操作,以组成去中心化矩阵;
23、s312、对去中心化矩阵进行svd分解,以处理得到拟合平面法向量n(a,b,c),
24、s313、根据预置平面公式、点云的平均值坐标求得平面截距d,据以处理得到得到平面方向:
25、ax+by+cz+d=0
26、s314、累加预置局部范围内的每个点云到拟合平面的距离值,得到局部表面的地面粗糙度r。
27、在更具体的技术方案中,步骤s32中,利用下式的点云协方差矩阵求取协防差矩阵c的特征值λ0,λ1,λ2以及特征值对应向量v0,v1,v2,特征值,以得到点云三维度变化情况指示信息:
28、
29、其中,pik代表第i个栅格附近第k个点云点,pmean代表第i个栅格子附近点云的质心。
30、本发明采用局部区域点云协方差特征分析对机器人可能运动的区域进行倾倒风险分析,是得地面机器人在运行于具有坡度的路面时,能够避免发生倾倒风险。
31、在更具体的技术方案中,步骤s32中,利用下述逻辑,确定局部表面变化程度情况评测信息:
32、
33、在更具体的技术方案中,步骤s4包括:
34、s41、定义地形代价t_cost;
35、s42、根据esdf地图,获取每个栅格的最近障碍物的距离代价,,根据距离代价、地形代价,利用下述逻辑求取最终搜索路径:
36、
37、其中,sparasity表示地形点云稀疏性,rmax代表允许的最大粗糙度值,σ表示点云偏离拟合平面的程度,σmax表示σ的最大允许值;s表示拟合平面法向量与z(0,0,1)之间的夹角,smax表示的s的最大值;g表示传统a*算法中的移动代价,h表示传统a*算法中的启发代价,desdf表示栅格在esdf地图中的距离值.wr、wσ、wsparsity表示各个代价的权重值;
38、s43、平滑处理最终搜索路径,以得到平滑全局路径。
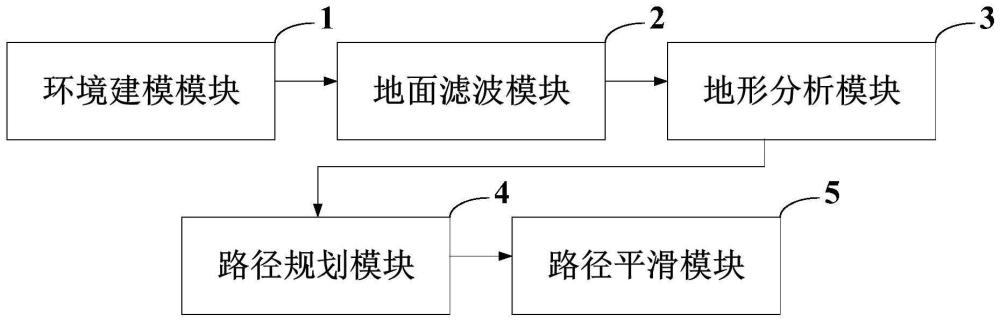
39、在更具体的技术方案中,未知非结构化环境下的地面机器人自主导航系统包括:
40、环境建模模块,用以规划输入接口,以接收地面机器人采集的感知定位信息、配准后点云数据,以进行点云数据建模,构建得到环境模型,更新esdf地图;
41、地形滤波模块,用以根据机器人的地形信息,获取地形栅格约束,据以进行地形滤波;
42、地形分析模块,用以在非结构化环境下进行地形分析,得到地形几何信息、地面粗糙度、地形表面变化程度、倾斜度以及地形点云稀疏性,据以综合评估,选取最高通过性路径,利用地形分析模块与地形滤波模块连接;
43、路径规划模块,用以根据地形栅格约束、esdf地图进行astar搜索,以根据得到最高通过性路径处理得到求取全局平滑路径,路径规划模块与地形分析模块及环境建模模块连接。
44、本发明相比现有技术具有以下优点:
45、本发明利用地形滤波模块针对地面机器人所特有的地形信息滤波,提高了三维环境下的路径规划效率。同时保证三维环境进行栅格建模效率,同时利用地面机器人的硬约束即机器人必须紧贴地面运动,缩小了路径规划的待选栅格范围,实现了未知非结构化环境下的地面机器人自主导航。
46、本发明在非结构化环境中,针对非平坦地面使得传统室内导航具有局限性的问题,通过分析地形几何信息,分析地面的粗糙度,倾斜度等指标,在综合评估选择通过性最高的路径,优化了非结构化环境导航效果。
47、本发明采用局部区域点云协方差特征分析对机器人可能运动的区域进行倾倒风险分析,是得地面机器人在运行于具有坡度的路面时,能够避免发生倾倒风险。
48、本发明解决了现有技术中存在的未知非结构化环境下的地面机器人自主导航难度较大的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!