实时多GNSS时间尺度保持方法及系统
本发明属于全球卫星导航系统(global navigation satellite system, gnss),具体涉及gnss时间尺度保持技术方案。
背景技术:
1、gnss可以提供全天时、全天候的定位、导航与授时服务。近年来,早期建设完成的gps、glonass两大系统先后启动现代化建设,中国北斗系统与galileo两大新系统也相继完成建设,目前已有四大gnss系统同时提供服务。得益于多个gnss系统建设与发展,多gnss联合处理技术得到充分研究与发展。
2、为解决卫星时钟与用户接收机时钟间不同步的问题,各gnss在广播星历中提供卫星钟差参数。卫星钟差参数是不同卫星时钟相对于一个公共时间尺度的偏差值。在gnss时间尺度保持方面,不同系统采用不同的技术方案。gps系统收集跟踪站观测数据并汇总至主控站,主控站基于卫星与地面站点全部原子钟,通过卡尔曼滤波解算维持gps时间尺度。北斗和galileo系统均基于地面原子钟组维持两系统时间尺度。对于事后解算的精密卫星钟差产品,国际gnss服务(international gnss service, igs)各分析中心通常以一个或多个地面站点接收机钟为参考保持短期时间尺度;igs卫星钟差最终产品通过多个分析中心产品组合得到,基于卫星原子钟与地面站点原子钟,通过卡尔曼滤波处理保持igs时间尺度。此外,igs实时分析中心可以提供实时精密卫星钟差服务,但主要关注于服务精度,未对时间尺度进行特殊处理。
3、由于各gnss系统维持各自的时间尺度,不同系统时间尺度间存在系统时间偏差(system time offset, sto)。此外,对于不同系统接收机硬件延迟可能不同,sto与接收机硬件延迟差异共同引起系统间偏差(inter-system bias, isb)问题。大量研究表明接收机硬件延迟差异长期稳定,然而sto会随时间发生变化,因此在多gnss联合处理中isb难以固定为常数,普遍通过估计额外参数解决。目前各gnss均计划或已在广播星历中播发sto参数,以帮助用户提前确定isb参数而减少待估参数,从而提升在观测卫星数不足时gnss服务性能。当前igs各分析中心仍缺乏对sto问题的处理,其提供的多gnss卫星钟差产品中sto同样存在变化问题,不利于用户固定isb参数。发明人团队的已有研究提出基于接收机硬件延迟差异的稳定特性建立isb模型,利用isb模型在实时卫星钟差估计中保持钟差产品sto稳定(mao,2024)。然而,该方法实施场景受限,仅针对卫星钟差估计,且卫星钟差参考时间随机性较大,未考虑稳定性问题,无法提供稳定多gnss时间尺度。
4、因此,如何摆脱现有技术,提供新的多gnss时间尺度保持技术方案,是本领域技术人员亟需解决的问题。
技术实现思路
1、为了解决上述现有技术中存在的不足,本发明提供一种实时多gnss时间尺度保持方法及系统,基于实时卫星钟差产品实现。
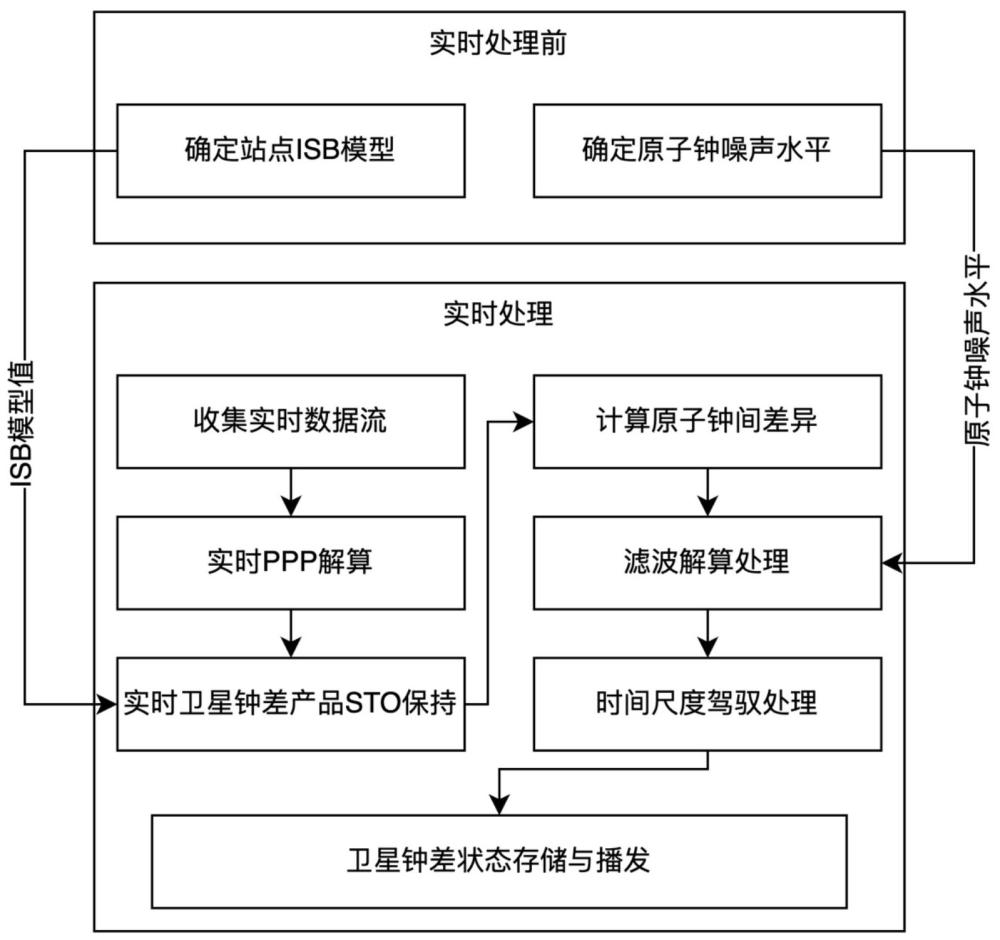
2、为了实现上述目的,本发明提出的技术方案为一种实时多gnss时间尺度保持方法,在确定原子钟噪声水平参数及地面站点的isb模型之后,进行实时处理实现实时多gnss 时间尺度,包括基于ppp解算获得实时多gnss卫星钟差产品sto与isb模型sto参考值的差异值;利用sto差异值得到拥有稳定sto的实时多gnss卫星钟差产品;接着基于sto稳定的实时多gnss卫星钟差产品,选择一参考原子钟得到多gnss卫星与地面站原子钟与该参考原子钟的差异值,采用原子钟间差异值作为观测量实现多gnss时间尺度。
3、而且,在实时处理前,确定原子钟噪声水平参数及地面站点的isb模型的实现方式为,利用已有卫星钟差及地面站点钟差产品计算原子钟的hadamard方差,进一步分析得到原子钟噪声水平参数;收集站点观测数据及精密卫星轨道钟差产品,进行多gnss精密单点定位解算,对isb序列进行分析得到各站点isb模型,各站点isb模型拥有统一的参考sto值。
4、而且,所述进行实时处理实现实时多 gnss 时间尺度,包括如下步骤,
5、s2.1,收集实时卫星轨道钟差产品、站点实时观测数据流,对实时数据进行解码并进行存储;
6、s2.2,利用实时卫星轨道钟差产品和站点实时观测数据,进行多gnss ppp解算,解算中选择一gnss系统作为参考系统,估计得到站点对于该参考系统接收机钟差参数、其他系统相对参考系统isb参数;
7、s2.3,估计当前多系统卫星钟差产品sto值与isb模型sto参考值的差异值,、分别表示参考gnss系统与其他gnss系统;
8、s2.4,基于步骤s2.3所得估计值,得到sto稳定的多gnss卫星钟差产品,实现方式如下,
9、对于某gnss系统与参考gnss系统,有
10、
11、其中,表示系统中不同的gnss卫星,为经过sto改正的卫星钟差,为初始卫星钟差;
12、根据上式,表达为
13、
14、式中,是isb模型中隐含的sto参考值,是卫星时钟,是对于系统的参考时间;本式表明系统卫星钟差相对系统卫星钟差始终保持稳定的sto值,不同gnss系统间卫星钟差拥有统一的时间参考,由此实现多gnss时间尺度;
15、s2.5,在gnss卫星原子钟与地面站点原子钟间选择一个参考原子钟,利用站点接收机钟差参数计算其他原子钟与参考原子钟的差异值;
16、s2.6,基于滤波解算处理保持稳定的时间尺度,包括以原子钟间差异值作为观测值,估计各原子钟相位、频率及频飘参数,估计得到的原子钟参数参考至保持的时间尺度;
17、s2.7,以utc(k)作为接收机钟的地面站点,对接收机进行校正处理,计算得到当前时间尺度与utc(k)间的差异值,基于差异值进行时间尺度驾驭处理;所述utc(k)是守时实验室k提供的utc的物理实现;
18、s2.8,将最终处理得到的卫星钟差状态进行存储与播发。
19、而且,所述估计当前多系统卫星钟差产品sto值与isb模型sto参考值的差异值,实现方式为,将ppp估计的isb参数与站点isb模型作差,基于极大似然估计方法估计当前多系统卫星钟差产品sto值与isb模型sto参考值的差异值。
20、而且,所述s2.5中,基于步骤s2.2所得站点接收机钟差参数及步骤s2.4所得多gnss卫星钟差产品,计算多gnss系统卫星原子钟与参考钟的钟间差异值。
21、另一方面,本发明还提供一种实时多gnss时间尺度保持系统,包括以下模块,
22、第一模块,用于在确定原子钟噪声水平参数及地面站点的isb模型;
23、第二模块,用于进行实时处理实现实时多 gnss 时间尺度,包括基于ppp解算获得实时多gnss卫星钟差产品sto与isb模型sto参考值的差异值;利用sto差异值得到拥有稳定sto的实时多gnss卫星钟差产品;接着基于sto稳定的实时多gnss卫星钟差产品,选择一参考原子钟得到多gnss卫星与地面站原子钟与该参考原子钟的差异值,采用原子钟间差异值作为观测量实现多gnss时间尺度。
24、另一方面,本发明还提供一种电子设备,包括存储器和处理器,所述处理器和所述存储器通过总线完成相互间的通信;所述存储器存储有可被所述处理器执行的程序指令,所述处理器调用所述程序指令能够执行如上所述的实时多gnss时间尺度保持方法。
25、另一方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于:该计算机程序被处理器执行时实现如上所述的实时多gnss时间尺度保持方法。
26、本发明提出的一种实时多gnss时间尺度保持方法及系统,基于实时卫星钟差产品实现,联合多gnss卫星原子钟和地面站点原子钟保持稳定时间尺度,不同gnss系统间卫星钟差产品具有稳定的sto。通过该方案可以提高卫星钟差服务基准稳定性,进而提升卫星钟差服务应用于授时解算的频率稳定性;此外,保持稳定的sto有利于帮助用户在多gnss联合处理时固定isb参数,减少待估参数,改善可观测卫星不足时定位解算精度及gnss服务可用性。
27、与现有技术相比,本发明具有的特点包括:
28、1. 提出利用站点ppp解算估计卫星钟差产品与isb模型间sto的差异;
29、2. 提出基于ppp解算保持多gnss卫星钟差sto稳定的方法;
30、3. 提出利用具有稳定sto的多gnss卫星钟差产品,进行多gnss系统卫星与地面站点原子钟联合时间尺度保持。
31、本发明方案实施简单方便,实用性强,解决了相关技术存在的实用性低及实际应用不便的问题,能够提高用户体验,具有重要的市场价值。
- 还没有人留言评论。精彩留言会获得点赞!