基于深度学习和成像反演技术的毫米波雷达安检方法及系统与流程
本发明涉及毫米波雷达,具体涉及基于深度学习和成像反演技术的毫米波雷达安检方法及系统。
背景技术:
1、毫米波雷达技术由于其波长特性,在安检领域具有独特优势,能够穿透衣物和其他非金属材料,从而有效检测隐蔽物品。然而,传统的毫米波雷达系统在图像清晰度、检测速度、成本控制以及适应复杂环境方面存在一定局限。例如,早期系统可能因分辨率不足而难以精确识别小型或隐蔽物体,或者因硬件成本较高而限制了其广泛应用,例如专利公开号cn114779241a公开的一种包裹安检方法、装置、存储介质及电子设备,采用的就是传统的毫米波雷达系统进行安检。此外,传统算法在处理复杂场景下的数据时,可能存在准确性不足和处理速度慢的问题。因此,迫切需要通过集成更先进的成像算法、数据处理技术和成本效益更高的硬件设计来进行改进和升级传统的毫米波雷达系统。
技术实现思路
1、本发明所要解决的技术问题在于现有技术的毫米波雷达安检方法及系统存在分辨率和精确度难以保证且检测速度慢的问题。
2、本发明通过以下技术手段解决上述技术问题的:基于深度学习和成像反演技术的毫米波雷达安检方法,包括以下步骤:
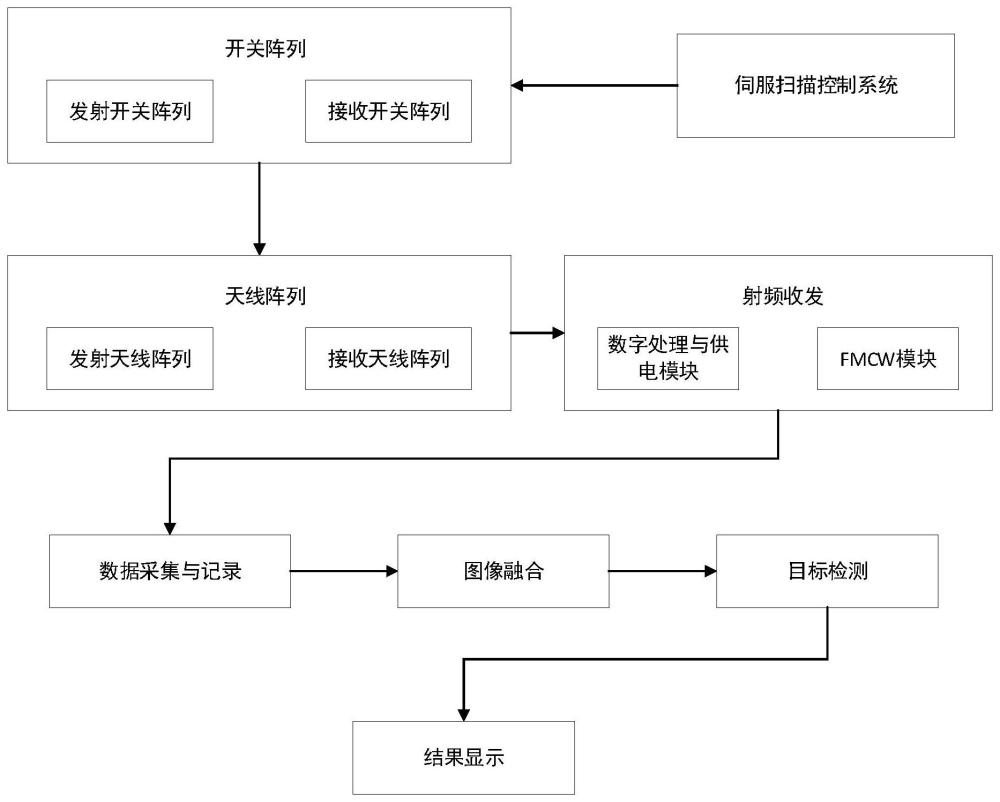
3、步骤一、fmcw模块产生雷达信号,发射开关阵列打开发射天线阵列,将雷达信号发射出去;
4、步骤二、伺服扫描控制系统调整天线的方向,确保雷达波束覆盖整个检测区域;
5、步骤三、接收开关阵列打开接收天线阵列,待测物体反射回来的信号被接收天线阵列接收并传输到fmcw模块,fmcw模块将接收到的信号进行下变频,得到中频信号;中频信号经过数模转换得到数字信号,对数字信号进行数字信号处理得到处理好的信号;
6、步骤四、将处理好的信号采用dt算法以及rma算法处理得到待测物体的图像;
7、步骤五、将待测物体的图像通过金字塔融合算法进行细节融合得到优化后的图像;
8、步骤六、将优化后的图像输入yolov8模型,输出待测物体的分类结果。
9、进一步地,所述dt算法的处理过程包括:
10、经步骤三处理好的信号中待测物体在位置r的散射场用下面的积分方程表示:
11、
12、其中,us(r)是待测物体在位置r的散射场,r′是源点的位置,f(r′)是待测物体的散射潜能,g(r,r′)是格林函数,v是待测物体的体积;
13、散射潜能与待测物体的介电常数和电导率有关,表示为:
14、f(r)=k2(∈(r)-∈0)+iωσ(r)
15、其中,k是波数,∈(r)和σ(r)分别是待测物体在位置r的介电常数和电导率,∈0是背景介电常数,ω是角频率;
16、通过求解散射场的积分方程,得到待测物体的介电常数和电导率。
17、更进一步地,所述rma算法的处理过程包括:
18、步骤401、对步骤三处理好的信号s(t)进行预处理得到预处理信号spre(t)
19、spre(t)=s(t)·w(t)
20、其中,w(t)是窗函数;
21、步骤402、对预处理信号spre(t)进行距离压缩:
22、srange(fr)=fft{spre(t)}·hr(fr)
23、其中,srange(fr)是距离压缩后的信号,fft表示傅里叶变换,hr(fr)是距离压缩滤波器;
24、步骤403、对距离压缩后的信号进行方位压缩:
25、sfinal(fr,fa)=ifft{srange(fr)·ha(fa)}
26、其中,sfinal(fr,fa)是压缩处理之后的信号,ifft表示逆傅里叶变换,ha(fa)是方位压缩滤波器;
27、步骤404、压缩处理之后的信号通过逆傅里叶变换得到信号的反射强度:
28、i(x,y)=ifft{sfinal(fr,fa)}
29、其中,i(x,y)表示图像中每个像素的强度;
30、步骤405、根据待测物体的介电常数、电导率以及信号的反射强度反演出待测物体的图像。
31、更进一步地,所述金字塔融合算法的处理过程为:
32、步骤501、高斯金字塔构建:将待测物体的图像输入高斯金字塔的第一层,对高斯金字塔的当前层进行高斯滤波,然后降采样生成下一层,用公式表示为
33、inext=downsample(gaussianblur(icurrent))
34、其中,inext为高斯金字塔的下一层的图像,icurrent为高斯金字塔的当前层图像,gaussianblur为高斯滤波,downsample为降采样;
35、步骤502、拉普拉斯金字塔构建:对高斯金字塔的每一层进行上采样,并利用高斯金字塔的上一层中减去上采样层,得到拉普拉斯层,用公式表示为
36、li=gi-upsample(gi+1)
37、其中,li表示拉普拉斯金字塔的第i个拉普拉斯层,gi+1表示高斯金字塔的当前层,gi表示高斯金字塔的上一层,upsample表示上采样;
38、步骤503、融合拉普拉斯金字塔:对每个层级的拉普拉斯金字塔进行平均融合;
39、步骤504、图像重构:利用拉普拉斯金字塔的各个层级平均融合的结果重构最终图像,得到待测物体的优化后的图像。
40、进一步地,所述数字信号处理包括滤波、放大及特征提取。
41、进一步地,所述毫米波雷达安检方法还包括步骤七:
42、待测物体的检测和识别结果通过计算机显示屏进行显示,展示检测到的待测物体的位置和类别。
43、本发明还提供基于深度学习和成像反演技术的毫米波雷达安检系统,包括:
44、信号发射单元,用于fmcw模块产生雷达信号,发射开关阵列打开发射天线阵列,将雷达信号发射出去;
45、扫描控制单元,用于伺服扫描控制系统调整天线的方向,确保雷达波束覆盖整个检测区域;
46、信号接收和处理单元,用于接收开关阵列打开接收天线阵列,待测物体反射回来的信号被接收天线阵列接收并传输到fmcw模块,fmcw模块将接收到的信号进行下变频,得到中频信号;中频信号经过数模转换得到数字信号,对数字信号进行数字信号处理得到处理好的信号;
47、图像反演单元,用于将处理好的信号采用dt算法以及rma算法处理得到待测物体的图像;
48、图像优化单元,用于将待测物体的图像通过金字塔融合算法进行细节融合得到优化后的图像;
49、目标检测单元,用于将优化后的图像输入yolov8模型,输出待测物体的分类结果。
50、进一步地,所述dt算法的处理过程包括:
51、经信号接收和处理单元处理好的信号中待测物体在位置r的散射场用下面的积分方程表示:
52、
53、其中,us(r)是待测物体在位置r的散射场,r′是源点的位置,f(r′)是待测物体的散射潜能,g(r,r′)是格林函数,v是待测物体的体积;
54、散射潜能与待测物体的介电常数和电导率有关,表示为:
55、f(r)=k2(∈(r)-∈0)+iωσ(r)
56、其中,k是波数,∈(r)和σ(r)分别是待测物体在位置r的介电常数和电导率,∈0是背景介电常数,ω是角频率;
57、通过求解散射场的积分方程,得到待测物体的介电常数和电导率。
58、更进一步地,所述rma算法的处理过程包括:
59、步骤401、对信号接收和处理单元处理好的信号s(t)进行预处理得到预处理信号spre(t)
60、spre(t)=s(t)·w(t)
61、其中,w(t)是窗函数;
62、步骤402、对预处理信号spre(t)进行距离压缩:
63、srange(fr)=fft{spre(t)}·hr(fr)
64、其中,srange(fr)是距离压缩后的信号,fft表示傅里叶变换,hr(fr)是距离压缩滤波器;
65、步骤403、对距离压缩后的信号进行方位压缩:
66、sfinal(fr,fa)=ifft{srange(fr)·ha(fa)}
67、其中,sfinal(fr,fa)是压缩处理之后的信号,ifft表示逆傅里叶变换,ha(fa)是方位压缩滤波器;
68、步骤404、压缩处理之后的信号通过逆傅里叶变换得到信号的反射强度:
69、i(x,y)=ifft{sfinal(fr,fa)}
70、其中,i(x,y)表示图像中每个像素的强度;
71、步骤405、根据待测物体的介电常数、电导率以及信号的反射强度反演出待测物体的图像。
72、更进一步地,所述金字塔融合算法的处理过程为:
73、步骤501、高斯金字塔构建:将待测物体的图像输入高斯金字塔的第一层,对高斯金字塔的当前层进行高斯滤波,然后降采样生成下一层,用公式表示为
74、inext=downsample(gaussianblur(icurrent))
75、其中,inext为高斯金字塔的下一层的图像,icurrent为高斯金字塔的当前层图像,gaussianblur为高斯滤波,downsample为降采样;
76、步骤502、拉普拉斯金字塔构建:对高斯金字塔的每一层进行上采样,并利用高斯金字塔的上一层中减去上采样层,得到拉普拉斯层,用公式表示为
77、li=gi-upsample(gi+1)
78、其中,li表示拉普拉斯金字塔的第i个拉普拉斯层,gi+1表示高斯金字塔的当前层,gi表示高斯金字塔的上一层,upsample表示上采样;
79、步骤503、融合拉普拉斯金字塔:对每个层级的拉普拉斯金字塔进行平均融合;
80、步骤504、图像重构:利用拉普拉斯金字塔的各个层级平均融合的结果重构最终图像,得到待测物体的优化后的图像。
81、进一步地,所述数字信号处理包括滤波、放大及特征提取。
82、进一步地,所述毫米波雷达安检系统还包括数据显示单元,所述数据显示单元用于:
83、待测物体的检测和识别结果通过计算机显示屏进行显示,展示检测到的待测物体的位置和类别。
84、本发明的优点在于:
85、(1)本发明通过精确的开关阵列技术发射和接收雷达信号,dt算法深入分析微弱散射信号以揭示物体特性,rma算法则确保即使在目标移动的情况下也能保持高清晰度的成像。金字塔融合算法进一步提升了图像质量,使得yolov8模型能够更准确地识别和分类,通过多种算法的结合使得整个方案分辨率和精确度大大提升,且显著提升检测速度。
86、(2)本发明简化系统的硬件结构,降低整体成本。
87、(3)本发明通过开关阵列的应用,提高了信号的定向性和覆盖范围,显著提升了雷达扫描的精度和分辨率。
88、(4)本发明通过dt反演算法的应用,提高了系统在弱散射条件下重建高质量图像的能力,结合rma成像技术,系统能够在动态环境下保持成像的清晰度和准确性,金字塔图像融合技术通过不同分辨率层级的结合,增强了图像的细节和对比度,提升了图像质量;利用图像融合技术,提高了系统在不同环境下的检测准确性,提高系统在复杂环境下的适应性。
- 还没有人留言评论。精彩留言会获得点赞!