目标识别方法、装置、设备及存储介质与流程
本技术实施例涉及雷达,具体涉及一种目标识别方法、装置、设备及存储介质。
背景技术:
1、由于雷达(例如,车载毫米波雷达)具有高稳定性能且不受恶劣天气影响等优势,使其被广泛应用在自动驾驶领域中。雷达作为无人驾驶汽车的一个重要部件,市场对价格低廉且性能出色的雷达的需求日益增长,其中,雷达的性能出色指的是,雷达探测目标的准确度较高且能从雷达目标回波信号中准确地识别出多个目标。
2、目前对雷达目标回波信号进行多目标识别的方法,大多数都是基于较复杂、运算量较大的超分辨算法实现,无法广泛地应用在实际工程中。因此,目前缺少一种运算量较少、准确度较高且能广泛应用在实际工程中的多目标识别方法。
技术实现思路
1、鉴于上述问题,本技术实施例提供了一种目标识别方法、装置、设备及存储介质,用于解决现有技术中存在的无法从雷达目标回波信号中快速地识别出多个目标的问题。
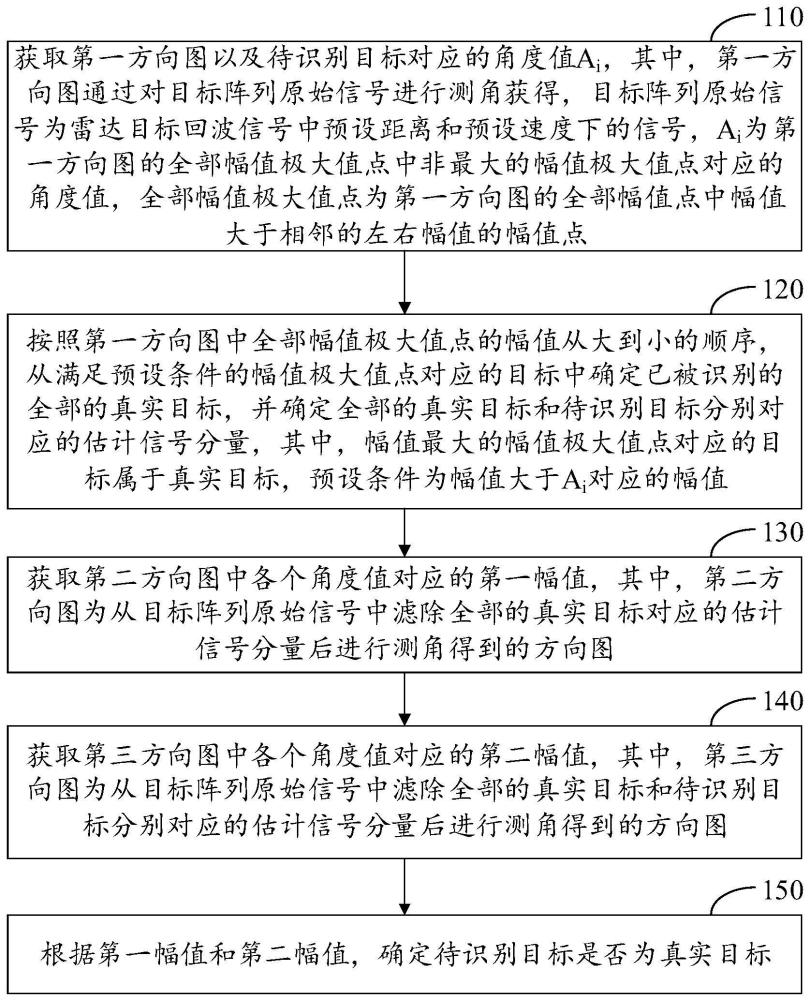
2、根据本技术实施例的一个方面,提供了一种目标识别方法,所述方法包括:获取第一方向图以及待识别目标对应的角度值ai,其中,所述第一方向图通过对目标阵列原始信号进行测角获得,所述目标阵列原始信号为雷达目标回波信号中预设距离和预设速度下的信号,ai为所述第一方向图的全部幅值极大值点中非最大的幅值极大值点对应的角度值,所述全部幅值极大值点为所述第一方向图的全部幅值点中幅值大于相邻的左右幅值的幅值点;按照所述第一方向图中所述全部幅值极大值点的幅值从大到小的顺序,从满足预设条件的幅值极大值点对应的目标中确定已被识别的全部的真实目标,并确定所述全部的真实目标和所述待识别目标分别对应的估计信号分量,其中,幅值最大的幅值极大值点对应的目标属于真实目标,所述预设条件为幅值大于ai对应的幅值;获取第二方向图中各个角度值对应的第一幅值,其中,所述第二方向图为从所述目标阵列原始信号中滤除所述全部的真实目标对应的估计信号分量后进行测角得到的方向图;获取第三方向图中各个角度值对应的第二幅值,其中,所述第三方向图为从所述目标阵列原始信号中滤除所述全部的真实目标和所述待识别目标分别对应的估计信号分量后进行测角得到的方向图;根据所述第一幅值和所述第二幅值,确定所述待识别目标是否为真实目标。
3、在一种可选的方式中,所述雷达目标回波信号为雷达阵列向探测区域发射电磁波后由所述探测区域中的物体反射回来的信号,通过如下步骤确定所述全部的真实目标中的第n个真实目标对应的估计信号分量,其中,所述第n个真实目标对应的角度值为an,n为正整数:确定所述第n个真实目标在所述雷达阵列探测下的理论回波信号;根据所述第n个真实目标对应的所述理论回波信号,以及第四方向图中表征an对应的信号强度的第一数值,确定所述第n个真实目标对应的所述估计信号分量,其中,所述第四方向图为从所述目标阵列原始信号中滤除前n-1个真实目标对应的估计信号分量后进行测角得到的方向图,若n为1,则所述第四方向图为所述第一方向图,所述第一数值为复数形式的数值;通过如下步骤确定所述待识别目标对应的所述估计信号分量:确定所述待识别目标在所述雷达阵列探测下的理论回波信号;根据所述待识别目标对应的所述理论回波信号,以及所述第二方向图中表征ai对应的信号强度的第二数值,确定所述待识别目标对应的所述估计信号分量,其中,所述第二数值为复数形式的数值。
4、在一种可选的方式中,所述确定所述第n个真实目标在所述雷达阵列探测下的理论回波信号,包括:根据an、所述第n个真实目标的俯仰角度值、第一预设参数、所述雷达阵列排布位置以及所述雷达目标回波信号的波长,确定所述第n个真实目标对应的指数值;以预设数值为底数,所述第n个真实目标对应的指数值为指数,确定所述第n个真实目标在所述雷达阵列下的所述理论回波信号;所述确定所述待识别目标在所述雷达阵列探测下的理论回波信号,包括:根据ai、所述待识别目标的俯仰角度值、所述第一预设参数、所述雷达阵列排布位置以及所述雷达目标回波信号的波长,确定所述待识别目标对应的指数值;以所述预设数值为底数,所述待识别目标对应的指数值为指数,确定所述待识别目标在所述雷达阵列下的所述理论回波信号。
5、在一种可选的方式中,所述第一方向图通过如下步骤获得:对所述雷达目标回波信号进行距离维和速度维的傅里叶变换,获得距离-多普勒rd谱数据;获取所述rd谱数据中所述预设距离和所述预设速度的所述目标阵列原始信号;对所述目标阵列原始信号进行数字波束形成测角,获得所述第一方向图。
6、在一种可选的方式中,所述第三方向图通过如下步骤确定:从所述目标阵列原始信号中滤除所述全部的真实目标和所述待识别目标对应的估计信号分量,获得所述待识别目标对应的滤波投影信号分量;对所述滤波投影信号分量进行数字波束形成测角,获得所述第三方向图。
7、在一种可选的方式中,所述获取第二方向图中各个角度值对应的第一幅值,包括:分别对所述第二方向图中各个角度值对应的表征信号强度的复数形式的数值进行求模处理,获得各个角度值对应的第一幅值;确定所述第三方向图中各个角度值对应的第二幅值,包括:分别对所述第三方向图中各个角度值对应的表征信号强度的复数形式的数值进行求模处理,获得各个角度值对应的第二幅值;所述根据所述第一幅值和所述第二幅值,确定所述待识别目标是否为真实目标,包括:将全部的第一幅值相加,获得sum1;将全部的第二幅值相加,获得sum2;若sum1与sum2的比值大于比值阈值,则确定所述待识别目标为真实目标。
8、在一种可选的方式中,获取所述待识别目标对应的角度值ai,包括:按照所述第一方向图中除最大的幅值极大值点以外的k个幅值极大值点从大到小的顺序获取第i个角度值ai,其中,k、i均为正整数,i≤k,i的初始值为1;在所述根据所述第一幅值和所述第二幅值,确定所述待识别目标是否为真实目标之后,所述方法还包括:若所述第三方向图中最大的幅值大于预设值,则对i自加1,并转至所述按照所述第一方向图中除最大的幅值极大值点以外的k个幅值极大值点从大到小的顺序获取第i个角度值ai的步骤。
9、根据本技术实施例的另一方面,提供了一种目标识别装置,包括:第一获取模块,用于获取第一方向图以及待识别目标对应的角度值ai,其中,所述第一方向图通过对目标阵列原始信号进行测角获得,所述目标阵列原始信号为雷达目标回波信号中预设距离和预设速度下的信号,ai为所述第一方向图的全部幅值极大值点中非最大的幅值极大值点对应的角度值,所述全部幅值极大值点为所述第一方向图的全部幅值点中幅值大于相邻的左右幅值的幅值点;第一确定模块,用于按照所述第一方向图中所述全部幅值极大值点的幅值从大到小的顺序,从满足预设条件的幅值极大值点对应的目标中确定已被识别的全部的真实目标,并确定所述全部的真实目标和所述待识别目标分别对应的估计信号分量,其中,幅值最大的幅值极大值点对应的目标属于真实目标,所述预设条件为幅值大于ai对应的幅值;第二获取模块,用于获取第二方向图中各个角度值对应的第一幅值,其中,所述第二方向图为从所述目标阵列原始信号中滤除所述全部的真实目标对应的估计信号分量后进行测角得到的方向图;第三获取模块,用于获取第三方向图中各个角度值对应的第二幅值,其中,所述第三方向图为从所述目标阵列原始信号中滤除所述全部的真实目标和所述待识别目标分别对应的估计信号分量后进行测角得到的方向图;第二确定模块,用于根据所述第一幅值和所述第二幅值,确定所述待识别目标是否为真实目标。
10、根据本技术实施例的另一方面,提供了一种目标识别设备,包括:处理器、存储器、通信接口和通信总线,所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信;所述存储器用于存储可执行指令,所述可执行指令使所述处理器执行如上所述的目标识别方法的操作。
11、根据本技术实施例的又一方面,提供了一种计算机可读存储介质,所述存储介质中存储有可执行指令,所述可执行指令在运行时执行如上述的目标识别设备方法的操作。
12、本技术实施例中,由于目标阵列原始信号是获得的实际信号,若当前待识别目标为真实目标,则其对应的估计信号分量接近于其在目标阵列原始信号中的实际的信号分量。因此,若待识别目标为真实目标,则从目标阵列原始信号滤除全部的真实目标以及待识别目标对应的估计信号分量后进行测角得到的第三方向图中,不再包括待识别目标对应的信号分量,则第三方向图中各个角度值对应的第二幅值与第二方向图各个角度值对应的第一幅值相比,会发生较大的变化。
13、若待识别目标不属于真实目标,即ai对应的幅值极大值点是由于旁瓣、栅瓣造成的假峰值点,则通过ai计算得到的与待识别目标对应的估计信号分量不属于真实目标对应的理论信号分量,那么也就无法从目标阵列原始信号中将其滤除,因此,第三方向图中各个角度值对应的第二幅值与第二方向图各个角度值对应的第一幅值相比,不会发生较大的变化。因此,本技术实施例中,通过判断第二幅值与第一幅值的大小关系,即可快速、准确地判断待识别目标是否为真实目标。
14、上述说明仅是本技术实施例技术方案的概述,为了能够更清楚了解本技术实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本技术实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!