车载雷达俯仰角校准的方法、装置、车载雷达及车辆与流程
本技术涉及智能驾驶,具体而言,涉及一种车载雷达俯仰角校准的方法、装置、车载雷达及车辆。
背景技术:
1、随着智能驾驶的快速发展,广泛应用毫米波雷达作为车载雷达。相比于传统的3d(速度、距离、方位角)毫米波雷达,4d(速度、距离、方位角、俯仰角)毫米波雷达增强了高度维度的检测,提高了在方位角和俯仰角方面的角分辨率,因此趋于选用4d毫米波雷达。而4d毫米波雷达装车时会产生安装角度误差,安装角度误差会影响4d毫米波雷达检测目标的角度信息,导致距离偏移量随目标的距离增加而增大,给车辆驾驶带来了安全隐患,甚至导致严重的交通事故。
2、目前,通常是在4d毫米波雷达出厂前采用下线标定方式校准4d毫米波雷达的安装角度误差,这对标定场地、校准器材等具有一定要求,在4d毫米波雷达售后维修换件、车辆行驶等过程中仍难以自动校准4d毫米波雷达安装的俯仰角。
技术实现思路
1、本技术实施例的目的在于提供一种车载雷达俯仰角校准的方法、装置、车载雷达及车辆,用以实现在车辆行驶过程中自动校准车载雷达安装的俯仰角的技术效果。
2、第一方面,本技术实施例提供了一种车载雷达俯仰角校准的方法,包括:
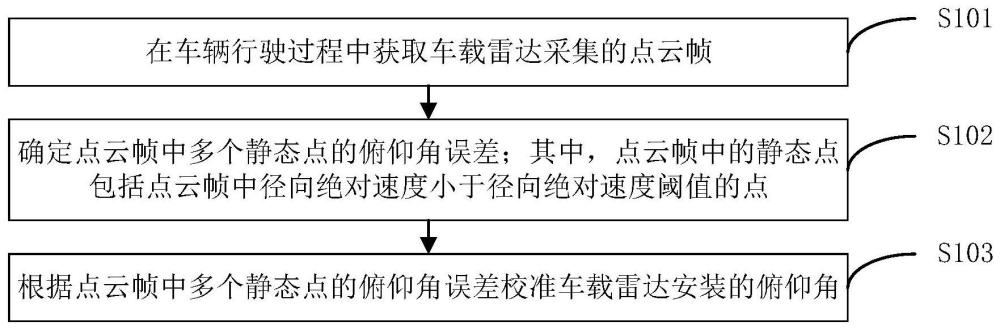
3、在车辆行驶过程中获取所述车载雷达采集的点云帧;
4、确定所述点云帧中多个静态点的俯仰角误差;其中,所述点云帧中的静态点包括所述点云帧中径向绝对速度小于径向绝对速度阈值的点;
5、根据所述点云帧中多个静态点的俯仰角误差校准所述车载雷达安装的俯仰角。
6、在上述实现过程中,通过在车辆行驶过程中获取车载雷达采集的点云帧,根据点云帧中多个静态点的俯仰角误差校准车载雷达安装的俯仰角,能够在车辆行驶过程中基于车载雷达检测的静态点执行车载雷达俯仰角校准操作,从而实现在车辆行驶过程中自动校准车载雷达安装的俯仰角。
7、进一步地,所述在车辆行驶过程中获取所述车载雷达采集的点云帧,包括:
8、在所述车辆行驶过程中获取目标时刻下所述车载雷达采集的所述点云帧;其中,所述目标时刻下所述车辆的行驶参数满足校准条件。
9、在上述实现过程中,通过在确定当前时刻下车辆的行驶参数满足校准条件的情况下,才对当前时刻下车载雷达采集的点云帧去做后续处理,能够在车辆处于有效行驶工况的情况下才触发执行车载雷达俯仰角校准操作,从而保证有效准确地校准车载雷达安装的俯仰角。
10、进一步地,所述校准条件包括所述车辆的车速大于车速阈值和/或所述车辆的横摆角速度小于横摆角速度阈值。
11、在上述实现过程中,通过预先设置校准条件包括车辆的车速大于车速阈值和/或车辆的横摆角速度小于横摆角速度阈值,能够在车辆处于高速和/或直行工况的情况下才触发执行车载雷达俯仰角校准操作,从而保证有效准确地校准车载雷达安装的俯仰角。
12、进一步地,所述点云帧中的静态点为所述点云帧中高度大于高度阈值且径向绝对速度小于所述径向绝对速度阈值的点。
13、在上述实现过程中,通过提取点云帧中高度大于高度阈值且径向绝对速度小于径向绝对速度阈值的点作为静态点,能够避免校准车载雷达俯仰角和方位角所产生的耦合问题,从而更加准确地校准车载雷达安装的俯仰角。
14、进一步地,在所述点云帧中,点的高度是基于所述点的径向距离和所述点的俯仰角之间的三角函数关系确定的;
15、所述点的径向绝对速度是基于所述车辆的车速、所述点的径向相对速度、所述点的方位角和所述点的俯仰角确定的;
16、其中,所述点的径向距离、所述点的俯仰角、所述点的径向相对速度和所述点的方位角是所述车载雷达检测的。
17、在上述实现过程中,通过针对点云帧中的点,基于点的径向距离和点的俯仰角之间的三角函数关系来确定点的高度,基于车辆的车速、点的径向相对速度、点的方位角和点的俯仰角来确定点的径向绝对速度,能够准确确定点云帧中点的高度和径向绝对速度,从而保证完整准确地提取点云帧中的多个静态点。
18、进一步地,所述点的径向绝对速度为所述点的径向牵连速度与所述点的径向相对速度的和;其中,所述点的径向牵连速度是基于所述车辆的车速、所述点的方位角和所述点的俯仰角之间的三角函数关系确定的。
19、在上述实现过程中,通过针对点云帧中的点,基于车辆的车速、点的方位角和点的俯仰角之间的三角函数关系来确定点的径向牵连速度,进而将点的径向牵连速度与点的径向相对速度相加来得到点的径向绝对速度,能够准确确定点云帧中点的径向绝对速度,从而保证完整准确地提取点云帧中的多个静态点。
20、进一步地,所述确定所述点云帧中多个静态点的俯仰角误差,包括:
21、对于所述点云帧中的每一静态点,基于所述车辆的车速、所述静态点的径向相对速度和所述静态点的方位角之间的三角函数关系,确定所述静态点的理论俯仰角;
22、根据所述静态点的理论俯仰角和所述静态点的检测俯仰角,确定所述静态点的俯仰角误差;
23、其中,所述静态点的径向相对速度、所述静态点的方位角和所述静态点的检测俯仰角是所述车载雷达检测的。
24、在上述实现过程中,通过针对点云帧中的静态点,基于车辆的车速、静态点的径向相对速度和静态点的方位角之间的三角函数关系,确定静态点的理论俯仰角,进而根据静态点的理论俯仰角和静态点的检测俯仰角,确定静态点的俯仰角误差,能够准确确定点云帧中多个静态点的俯仰角误差。
25、进一步地,所述根据所述点云帧中多个静态点的俯仰角误差校准所述车载雷达安装的俯仰角,包括:
26、根据所述点云帧中多个静态点的俯仰角误差统计平均值;
27、根据所述平均值校准所述车载雷达安装的俯仰角。
28、在上述实现过程中,通过根据点云帧中多个静态点的俯仰角误差的平均值来校准车载雷达安装的俯仰角,能够快速准确地校准车载雷达安装的俯仰角,从而进一步提高车载雷达俯仰角校准效率。
29、进一步地,所述根据所述点云帧中多个静态点的俯仰角误差校准所述车载雷达安装的俯仰角,包括:
30、在所述点云帧中多个静态点的数量大于数量阈值的情况下,根据所述点云帧中多个静态点的俯仰角误差校准所述车载雷达安装的俯仰角;
31、在所述点云帧中多个静态点的数量小于或等于所述数量阈值的情况下,结合所述点云帧和所述点云帧的后续点云帧中多个静态点的俯仰角误差,校准所述车载雷达安装的俯仰角;其中,所述点云帧和所述点云帧的后续点云帧中多个静态点的数量之和大于所述数量阈值。
32、在上述实现过程中,通过在点云帧中多个静态点的数量大于数量阈值的情况下,根据点云帧中多个静态点的俯仰角误差校准车载雷达安装的俯仰角,在点云帧中多个静态点的数量小于或等于数量阈值的情况下,结合点云帧和点云帧的后续点云帧中多个静态点的俯仰角误差校准车载雷达安装的俯仰角,能够更加准确地校准车载雷达安装的俯仰角。
33、进一步地,所述根据所述点云帧中多个静态点的俯仰角误差校准所述车载雷达安装的俯仰角,包括:
34、在确定所述点云帧中多个静态点的俯仰角误差有效的情况下,根据所述点云帧中多个静态点的俯仰角误差校准所述车载雷达安装的俯仰角。
35、在上述实现过程中,通过仅在点云帧中多个静态点的俯仰角误差有效的情况下,才根据点云帧中多个静态点的俯仰角误差校准车载雷达安装的俯仰角,能够保证有效准确地校准车载雷达安装的俯仰角。
36、进一步地,所述确定所述点云帧中多个静态点的俯仰角误差有效,包括:
37、检验所述点云帧中多个静态点的俯仰角误差是否符合正态分布;
38、在所述点云帧中多个静态点的俯仰角误差符合正态分布的情况下,确定所述点云帧中多个静态点的俯仰角误差有效。
39、在上述实现过程中,通过基于正态分布符合情况检验点云帧中多个静态点的俯仰角误差是否有效,能够准确检验点云帧中多个静态点的俯仰角误差的有效性。
40、进一步地,所述确定所述点云帧中多个静态点的俯仰角误差有效,包括:
41、根据所述点云帧中多个静态点的俯仰角误差,统计平均值和中位数;
42、在所述平均值等于所述中位数的情况下,确定所述点云帧中多个静态点的俯仰角误差有效。
43、在上述实现过程中,通过基于“平均值=中位数”的条件满足情况检验点云帧中多个静态点的俯仰角误差是否有效,能够快速准确地检验点云帧中多个静态点的俯仰角误差的有效性。
44、第二方面,本技术实施例提供了一种车载雷达俯仰角校准的装置,包括:
45、点云帧采集模块,用于在车辆行驶过程中获取所述车载雷达采集的点云帧;
46、俯仰角误差确定模块,用于确定所述点云帧中多个静态点的俯仰角误差;其中,所述点云帧中的静态点包括所述点云帧中径向绝对速度小于径向绝对速度阈值的点;
47、俯仰角校准模块,用于根据所述点云帧中多个静态点的俯仰角误差校准所述车载雷达安装的俯仰角。
48、第三方面,本技术实施例提供了一种电子设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序;所述存储器与所述处理器耦接,且所述处理器执行所述计算机程序时实现如上所述的方法。
49、第四方面,本技术实施例提供了一种车辆,包括如上所述的电子设备。
50、第五方面,本技术实施例提供了一种计算机程序产品,所述计算机程序产品包括指令,所述指令在由计算机执行时,使得所述计算机实施如上所述的方法。
51、第六方面,本技术实施例提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序;其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行如上所述的方法。
- 还没有人留言评论。精彩留言会获得点赞!