一种船舶航行避碰路径规划方法及系统与流程
本发明涉及船舶航行避碰路径规划,具体涉及一种船舶航行避碰路径规划方法及系统。
背景技术:
1、随着人工智能和计算机技术的发展,智能船舶相关技术成为了研究的热门方向,其中船舶智能航行路径规划是船舶智能化发展进程中至关重要的一环。路径规划是指在给定的地图或环境中,找到一条从起点到终点的运动路径的过程。船舶智能航行路径规划旨在确保船舶安全航行的前提下提供一条具备运动可行性的路径。
2、当前的路径规划方法主要多为基于传统规划算法或优化算法的航线规划方法,以及部分基于避碰原则的方法。传统的航线规划方法通常基于静态地图信息和预先设定的航线,通过计算最短路径或考虑避开障碍物的方式来规划船舶的航行路径。而优化算法则更倾向于考虑船舶性能、环境条件和其他约束因素,以求得更加经济高效或安全可靠的航行路径。此外,部分方法还试图结合避碰规则,通过预测其他船舶的航行行为来规避潜在的碰撞风险。
3、然而,这些方法存在一些问题:1)静态规划限制:传统的航线规划方法通常基于静态地图信息,无法充分考虑到实时环境变化对航行路径的影响,容易导致规划路径与实际情况不符。2)局部最优解:优化算法虽然能够考虑更多因素,但在求解过程中常常陷入局部最优解,导致生成的路径并非全局最优,甚至存在安全隐患。3)避碰规则考虑不足:部分方法虽然试图考虑避碰规则,但未能充分考虑到复杂的船舶交通环境和不同船舶间的互动关系,无法准确预测和规避碰撞风险。4)实时性和适应性不足:现有方法往往缺乏对实时环境信息的及时更新和适应能力,无法有效应对突发情况和复杂的海上交通状况。
4、综上所述,当前的路径规划方法在船舶智能化发展中仍然存在一些不足之处,需要更加智能化和全面考虑避碰规则的路径规划方法来解决这些问题。
技术实现思路
1、为解决现有船舶航行路径规划过程中存在的避碰规则考虑不足、生成的路径并非全局最优等问题,本发明提供了一种船舶航行避碰路径规划方法,基于本船与多个目标船舶的航行信息,通过采用特定的判断方法对所有船舶会遇态势进行分析,能够计算出所有场景下的船舶避碰路径点坐标,并与三阶贝塞尔曲线相结合,实现了充分考虑海上避碰规则的船舶航行避碰路径规划。本发明还涉及一种船舶航行避碰路径规划系统。
2、本发明的技术方案如下:
3、一种船舶航行避碰路径规划方法,其特征在于,包括以下步骤:
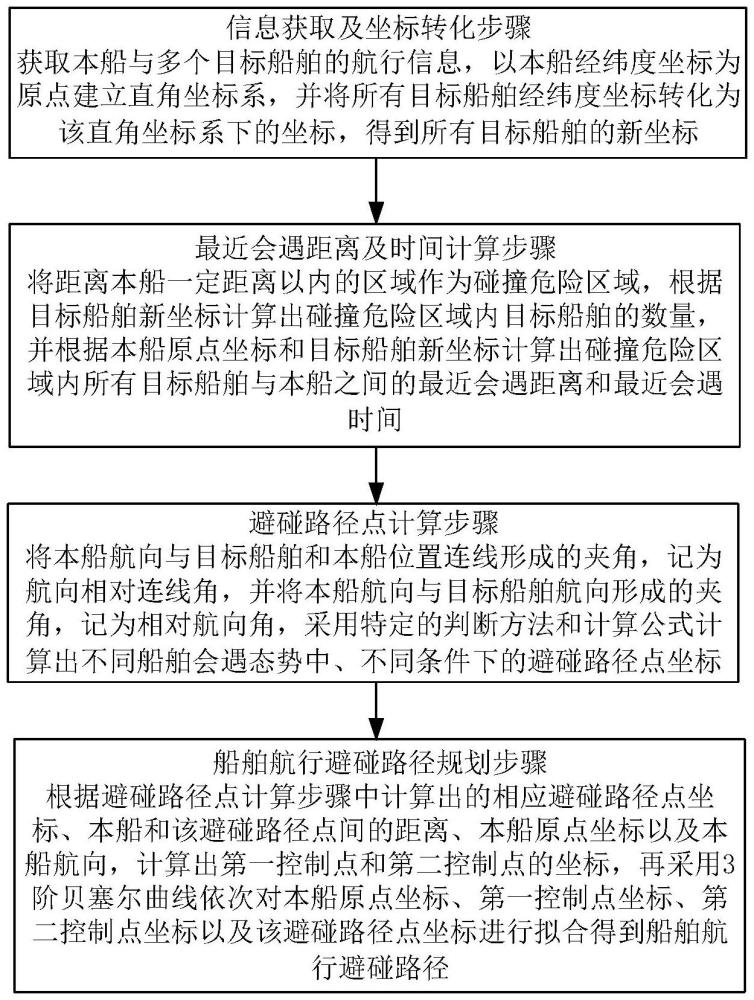
4、信息获取及坐标转化步骤:获取某个时刻本船与多个目标船舶的航行信息,所述航行信息包括本船和目标船舶的经纬度坐标、最近会遇点经纬度坐标、本船航向、本船航速、目标船舶航向和目标船舶航速;以本船经纬度坐标为原点建立直角坐标系,并将所有目标船舶经纬度坐标转化为该直角坐标系下的坐标,得到所有目标船舶的新坐标;
5、最近会遇距离及时间计算步骤:将距离本船一定距离以内的区域作为碰撞危险区域,根据目标船舶新坐标计算出碰撞危险区域内目标船舶的数量,并根据本船的原点坐标和目标船舶的新坐标计算出本船与目标船舶之间的距离,根据本船航速向量和目标船舶航速向量计算出目标船舶相对于本船的相对速度向量,再根据本船与目标船舶之间的距离、以及相对速度向量和本船位置连线形成的夹角计算出目标船舶与本船之间的最近会遇距离,根据本船与目标船舶之间的距离、相对速度向量和本船位置连线形成的夹角、以及相对速度向量计算出目标船舶与本船之间的最近会遇时间;
6、避碰路径点计算步骤:将本船航向与目标船舶和本船位置连线形成的夹角,记为航向相对连线角,并将本船航向与目标船舶航向形成的夹角,记为相对航向角;根据航向相对连线角和相对航向角或根据航向相对连线角、相对航向角、本船航速和目标船舶航速判断本船和目标船舶的船舶会遇态势,当判断出船舶会遇态势为追越场景或对遇场景时,若最近会遇距离满足第一限定条件,根据本船航向计算出第一避碰路径点坐标,若最近会遇距离满足第二限定条件且最近会遇时间满足第三限定条件,根据本船航向和最近会遇距离计算出第二避碰路径点坐标;当判断出船舶会遇态势为交叉会遇场景时,再根据最近会遇距离、最近会遇时间以及航向相对连线角判断本船是否为让路船,当判断出本船是让路船,若最近会遇时间满足第三限定条件,且航向相对连线角满足第一预设范围、相对航向角满足预设航向角范围,根据目标船舶航向和最近会遇点经纬度坐标计算出第三避碰路径点坐标,若最近会遇时间满足第三限定条件,且航向相对连线角满足第二预设范围,则根据目标船舶航向计算出第四避碰路径点坐标;
7、船舶航行避碰路径规划步骤:根据避碰路径点计算步骤中计算出的相应避碰路径点坐标、本船和该避碰路径点间的距离、本船原点坐标以及本船航向,计算出第一控制点和第二控制点的坐标,再采用3阶贝塞尔曲线依次对本船原点坐标、第一控制点坐标、第二控制点坐标以及该避碰路径点坐标进行拟合得到船舶航行避碰路径。
8、优选地,所述避碰路径点计算步骤中,根据航向相对连线角和相对航向角或根据航向相对连线角、相对航向角、本船航速和目标船舶航速判断本船和目标船舶的船舶会遇态势判断本船和目标船舶的船舶会遇态势具体为:当航向相对连线角的绝对值小于第一角度阈值,且相对航向角的绝对值小于第二角度阈值,且本船航速大于目标船舶航速时,判断本船和目标船舶的船舶会遇态势为追越场景;当航向相对连线角的绝对值小于第一角度阈值、相对航向角大于第三角度阈值且小于第四角度阈值时,判断本船和目标船舶的船舶会遇态势为对遇场景,所述第二角度阈值小于第三角度阈值。
9、优选地,所述避碰路径点计算步骤中,根据最近会遇距离、最近会遇时间以及航向相对连线角判断本船是否为让路船包括:当最近会遇距离大于零且小于预设距离阈值、最近会遇时间大于零且小于预设时间阈值、以及航向相对连线角大于第五角度阈值且小于第六角度阈值时,判断本船是为让路船,所述第一角度阈值小于第五角度阈值。
10、优选地,将船舶会遇态势中除追越场景和对遇场景之外的其他场景判定为交叉会遇场景。
11、优选地,所述船舶航行避碰路径规划步骤中,根据本船原点坐标和该避碰路径点坐标,并采用欧几里德距离计算出本船和该避碰路径点间的距离。
12、一种船舶航行避碰路径规划系统,其特征在于,包括依次连接的信息获取及坐标转化模块、最近会遇距离及时间计算模块、避碰路径点计算模块以及船舶航行避碰路径规划模块,
13、所述信息获取及坐标转化模块,获取某个时刻本船与多个目标船舶的航行信息,所述航行信息包括本船和目标船舶的经纬度坐标、最近会遇点经纬度坐标、本船航向、本船航速、目标船舶航向和目标船舶航速;以本船经纬度坐标为原点建立直角坐标系,并将所有目标船舶经纬度坐标转化为该直角坐标系下的坐标,得到所有目标船舶的新坐标;
14、所述最近会遇距离及时间计算模块,将距离本船一定距离以内的区域作为碰撞危险区域,根据目标船舶新坐标计算出碰撞危险区域内目标船舶的数量,并根据本船原点坐标和目标船舶的新坐标计算出本船与目标船舶之间的距离,根据本船航速向量和目标船舶航速向量计算出目标船舶相对于本船的相对速度向量,再根据本船与目标船舶之间的距离、以及相对速度向量和本船位置连线形成的夹角计算出目标船舶与本船之间的最近会遇距离,根据本船与目标船舶之间的距离、相对速度向量和本船位置连线形成的夹角、以及相对速度向量计算出目标船舶与本船之间的最近会遇时间;
15、所述避碰路径点计算模块,将本船航向与目标船舶和本船位置连线形成的夹角,记为航向相对连线角,并将本船航向与目标船舶航向形成的夹角,记为相对航向角;根据航向相对连线角和相对航向角或根据航向相对连线角、相对航向角、本船航速和目标船舶航速判断本船和目标船舶的船舶会遇态势,当判断出船舶会遇态势为追越场景或对遇场景时,若最近会遇距离满足第一限定条件,根据本船航向计算出第一避碰路径点坐标,若最近会遇距离满足第二限定条件且最近会遇时间满足第三限定条件,根据本船航向和最近会遇距离计算出第二避碰路径点坐标;当判断出船舶会遇态势为交叉会遇场景时,再根据最近会遇距离、最近会遇时间以及航向相对连线角判断本船是否为让路船,当判断出本船是让路船,若最近会遇时间满足第三限定条件,且航向相对连线角满足第一预设范围、相对航向角满足预设航向角范围,根据目标船舶航向和最近会遇点经纬度坐标计算出避碰路径点坐标,若最近会遇时间满足第三限定条件,且航向相对连线角满足第二预设范围,则根据目标船舶航向计算出避碰路径点坐标;
16、所述船舶航行避碰路径规划模块,根据避碰路径点计算步骤中计算出的相应避碰路径点坐标、本船和该避碰路径点间的距离、本船原点坐标以及本船航向,计算出第一控制点和第二控制点的坐标,再采用3阶贝塞尔曲线依次对本船原点经纬度坐标、第一控制点坐标、第二控制点坐标以及该避碰路径点坐标进行拟合得到船舶航行避碰路径。
17、优选地,所述避碰路径点计算模块中,根据航向相对连线角和相对航向角或根据航向相对连线角、相对航向角、本船航速和目标船舶航速判断本船和目标船舶的船舶会遇态势判断本船和目标船舶的船舶会遇态势具体为:当航向相对连线角的绝对值小于第一角度阈值,且相对航向角的绝对值小于第二角度阈值,且本船航速大于目标船舶航速时,判断本船和目标船舶的船舶会遇态势为追越场景;当航向相对连线角的绝对值小于第一角度阈值、相对航向角大于第三角度阈值且小于第四角度阈值时,判断本船和目标船舶的船舶会遇态势为对遇场景,所述第二角度阈值小于第三角度阈值。
18、优选地,所述避碰路径点计算模块中,根据最近会遇距离、最近会遇时间以及航向相对连线角判断本船是否为让路船包括:当最近会遇距离大于零且小于预设距离阈值、最近会遇时间大于零且小于预设时间阈值、以及航向相对连线角大于第五角度阈值且小于第六角度阈值时,判断本船是为让路船,所述第一角度阈值小于第五角度阈值。
19、优选地,将船舶会遇态势中除追越场景和对遇场景之外的其他场景判定为交叉会遇场景。
20、优选地,所述船舶航行避碰路径规划模块中,根据本船原点坐标和该避碰路径点坐标,并采用欧几里德距离计算出本船和该避碰路径点间的距离。
21、本发明的有益效果为:
22、本发明提供的一种船舶航行避碰路径规划方法,先获取本船与多个目标船舶的航行信息,以航行信息中本船经纬度坐标为原点建立直角坐标系,并将所有目标船舶的经纬度坐标转化为该直角坐标系下的坐标数据,然后根据本船经纬度坐标和目标船舶新坐标计算出碰撞危险区域内所有目标船舶与本船之间的最近会遇距离和最近会遇时间,再采用特定的判断方法判断出本船和目标船的船舶会遇态势,并在不同的船舶会遇态势下,采用不同的计算公式计算出对应的避碰路径点坐标,最后根据计算出的避碰路径点坐标、本船经纬度坐标、本船航向、以及本船和该避碰路径点间的距离,计算出第一控制点和第二控制点坐标,再采用3阶贝塞尔曲线依次对本船经纬度坐标、第一控制点坐标、第二控制点坐标以及该避碰路径点坐标进行拟合得到船舶航行避碰路径,实现考虑海上避碰规则的船舶航行避碰路径规划。本发明充分考虑了所有避碰规则,考虑了避碰规则中让路船、直航船判定问题,以及对遇、交叉会遇与追越等会遇态势判定问题,针对不同的船舶会遇态势形成了完善且全面的避碰路径点计算,能够计算出所有场景下的船舶避碰路径点,并通过将避碰路径点与三阶贝塞尔曲线插值方法进行了结合,实现了船舶避碰功能,并生成了考虑船舶运动特性的跟踪路径,有利于控制系统的航迹跟踪控制。
23、本发明还涉及一种船舶航行避碰路径规划系统,该系统与上述的船舶航行避碰路径规划方法相对应,可理解为是一种实现上述船舶航行避碰路径规划方法的系统,包括依次连接的信息获取及坐标转化模块、最近会遇距离及时间计算模块、避碰路径点计算模块以及船舶航行避碰路径规划模块,各模块相互协同工作,基于本船与多个目标船舶的航行信息,通过采用特定的判断方法对船舶会遇态势进行分析,充分考虑避碰规则中让路船、直航船判定问题,对遇、交叉会遇与追越会遇态势判定问题,结合工程实践经验,形成了避碰路径点的所有计算方法,并结合三阶贝塞尔曲线进行插值,实现考虑海上避碰规则的船舶航行避碰路径规划。
- 还没有人留言评论。精彩留言会获得点赞!