一种电机转角测量系统及方法与流程
本发明属于电机测控,具体涉及一种电机转角(旋转角度)测量系统及方法。
背景技术:
1、在现代机床、机器人和其它机械设备等控制系统中,在火力控制和指挥系统等军事工程装备中,往往有这样的要求:高精度地传输或复现一个角度数据;精确测量某个线性位移或角位移;完成某个系统三维空间位置、速度和加速度的准确控制;机械上不固联的两轴或多轴之间实现同步旋转,即所谓角度同步跟踪等等,都离不开数字角度数据的测量与转换等过程。
2、伺服系统的很多应用场景需要实时获得其电机精确的角度位置信息。现有技术一般采用与电机同步旋转(直接或经减速器与电机交连)的光栅编码器获得其角度位置信息,并转换成数字角度数据。光栅编码器的缺点是在户外恶劣环境的应用受到很大限制,且硬件成本高。为此,本发明提出一种电机转角测量系统及方法,通过对与电机交连的旋转变压器输出信号进行变换,输出反映电机转子位置的角度数字信号。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提出一种电机转角测量系统及方法。
2、为了实现上述目的,本发明采用以下技术方案。
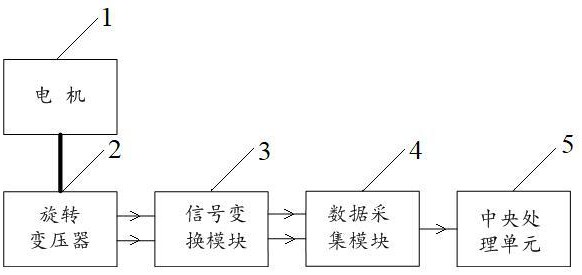
3、第一方面,本发明提供一种电机转角测量系统,包括:与电机机械连接的旋转变压器,与旋转变压器相连的信号变换模块,与信号变换模块相连的数据采集模块,以及与数据采集模块相连的中央处理单元;旋转变压器用于输出两相幅度分别受sin θ、cos θ调制的正弦信号 v1、 v2, θ为所述电机的转角;信号变换模块用于获得 v1、 v2的幅度调制信号v1、v2及其绝对值信号|v1|、|v2|;数据采集模块用于将信号变换模块输出的模拟电压信号转换成数字信号后送至中央处理单元;中央处理单元用于基于v1、v2及|v1|、|v2|计算电机转角 θ。
4、进一步地,所述信号变换模块包括:第一检波器及与之相连的第一绝对值电路,第二检波器及与之相连的第二绝对值电路;第一检波器和第二检波器分别用于从输入的 v1、 v2中提取幅度调制信号v1、v2;第一绝对值电路和第二绝对值电路分别用于将输入的v1、v2变换成|v1|、|v2|。
5、更进一步地,所述第一绝对值电路和第二绝对值电路均包括比较器、反相器和二选一开关;比较器的一个输入端与v i信号相连,另一个输入端接地,输出端与二选一开关的控制端相连,并将表示v i正负的状态信号送至中央处理单元;反相器的输入端连接v i信号,输出端的-v i信号与二选一开关的一个输入端相连;二选一开关的另一个输入端与v i信号相连,输出端通过输出v i或-v i得到|v i|;其中, i=1,2。
6、进一步地,所述数据采集模块包括与信号变换模块输出信号|v i|相连的采样保持电路s/h i,以及输入端与s/h i的输出端相连、输出端与中央处理单元相连的模数转换器adc i,s/h i、adc i的控制端分别与中央处理单元相连;其中, i=1,2。
7、进一步地,基于v1、v2及|v1|、|v2|计算电机转角 θ的方法包括:
8、将 θ的取值范围[00,3600)划分为8个角度区间,第 i个角度区间为:[450×( i-1),450× i), i=1,2,…,8;
9、对|v1|、|v2|按下式进行归一化:
10、
11、式中, x'为 x的归一化值, xmax为 x的最大值, x=|v1|,|v2|, x'=|v1| ',|v2| ';
12、基于v1、v2和|v2| '-|v1| '的正负及|v1| '的单调性,确定 θ所属的角度区间;
13、计算vx=min(|v1| ',|v2| '),求解vx对应的角 δ,0≤ δ≤450;
14、基于 δ以及 θ所属的角度区间计算 θ。
15、更进一步地,所述确定 θ所属的角度区间的方法,包括:
16、若v1≥0,v2≥0,|v2| '-|v1| '≥0,且|v1| '(n)-|v1| '(n-1)>0,则 θ属于[00,450);
17、若v1≥0,v2≥0,|v2| '-|v1| '<0,且|v1| '(n)-|v1| '(n-1)>0,则 θ属于[450,900);
18、若v1≥0,v2<0,|v2| '-|v1| '<0,且|v1| '(n)-|v1| '(n-1)<0,则 θ属于[900,1350);
19、若v1≥0,v2<0,|v2| '-|v1| '≥0,且|v1| '(n)-|v1| '(n-1)<0,则 θ属于[1350,1800);
20、若v1<0,v2<0,|v2| '-|v1| '≥0,且|v1| '(n)-|v1| '(n-1)>0,则 θ属于[1800,2250);
21、若v1<0,v2<0,|v2| '-|v1| '<0,且|v1| '(n)-|v1| '(n-1)>0,则 θ属于[2250,2700);
22、若v1<0,v2≥0,|v2| '-|v1| '<0,且|v1| '(n)-|v1| '(n-1)<0,则 θ属于[2700,3150);
23、若v1<0,v2≥0,|v2| '-|v1| '≥0,且|v1| '(n)-|v1| '(n-1)<0,则 θ属于[3150,3600);
24、其中,|v1| '(n)、|v1| '(n-1)分别为|v1| '在当前时刻和上一时刻的值。
25、更进一步地,按下式计算vx对应的角 δ:
26、
27、式中, δ的单位为度。
28、更进一步地,按下式计算vx对应的角 δ:
29、
30、式中, δ的单位为度。
31、更进一步地,所述基于 δ和 θ所属的角度区间计算 θ,包括:
32、若 θ属于[00,450),则 θ= δ;
33、若 θ属于[450,900),则 θ=900- δ;
34、若 θ属于[900,1350),则 θ=900+ δ;
35、若 θ属于[1350,1800),则 θ=1800- δ;
36、若 θ属于[1800,2250),则 θ=1800+ δ;
37、若 θ属于[2250,2700),则 θ=2700- δ;
38、若 θ属于[2700,3150),则 θ=2700+ δ;
39、若 θ属于[3150,3600),则 θ=3600- δ。
40、第二方面,本发明提供一种应用所述系统进行电机转角测量的方法,包括以下步骤:
41、实时获取v1、v2的正负状态及其绝对值信号|v1|、|v2|,其中,v1、v2分别为旋转变压器输出的两相幅度分别受sin θ、cos θ调制的正弦信号 v1、 v2的幅度调制信号, θ为电机的转角;
42、基于v1、v2的正负状态及|v1|、|v2|与 θ的关系,计算电机转角 θ。
43、与现有技术相比,本发明具有以下有益效果。
44、本发明通过设置与电机机械连接的旋转变压器,与旋转变压器相连的信号变换模块,与信号变换模块相连的数据采集模块,以及与数据采集模块相连的中央处理单元,旋转变压器用于输出两相幅度分别受sin θ、cos θ调制的正弦信号 v1、 v2, θ为所述电机的转角,信号变换模块用于获得 v1、 v2的幅度调制信号v1、v2及其绝对值信号|v1|、|v2|,数据采集模块用于将信号变换模块输出的模拟电压信号转换成数字信号后送至中央处理单元,中央处理单元用于基于v1、v2及|v1|、|v2|计算电机转角 θ,实现了电机转角数据的自动测量。本发明通过对与电机连接的旋转变压器输出的两相电压信号进行变换处理,得到了电机旋转的角位置数字信号,解决了现有技术采用光栅编码器获取角度信号存在的在户外恶劣环境的应用受限、硬件成本高等问题。
- 还没有人留言评论。精彩留言会获得点赞!