一种基于迁移式深度学习齿轮箱故障智能诊断方法
本发明涉及齿轮故障诊断领域,特别是涉及一种基于迁移式深度学习齿轮箱故障智能诊断方法。
背景技术:
1、作为机械领域传动系统最重要的一个环节,齿轮箱系统已经成为工业生产与高端装备动力传动系统核心部件。研究齿轮箱关键零件故障智能诊断,对推动工业智能化、汽车自动驾驶与高质量生活水平具有重要意义。人工智能得到了快速发展,神经网络与各种算法在机械故障智能诊断方面的研究受到重视,但齿轮箱故障诊断仍停留在理论水平与较低的诊断性能,同时不具备大范围推广可能性。建立适合的神经网络模型提升齿轮箱关键零件故障诊断性能,并实现不同系统齿轮箱的迁移是当前研究热点。
2、为了解决上述问题,本发明提出了一种基于迁移式深度学习齿轮箱故障智能诊断方法,该方法基于squeezenet迁移式深度学习神经网络框架进行优化,搭建卷积、池化、激活、全连接层算法,对梯度下降与反向传播算法优化,搭建齿轮箱故障实验台架测量故障信号,优化网络参数训练模型准确率,实现对故障种类的智能诊断。该方法既可推动工程技术发展,又可产生较大社会经济效益。
技术实现思路
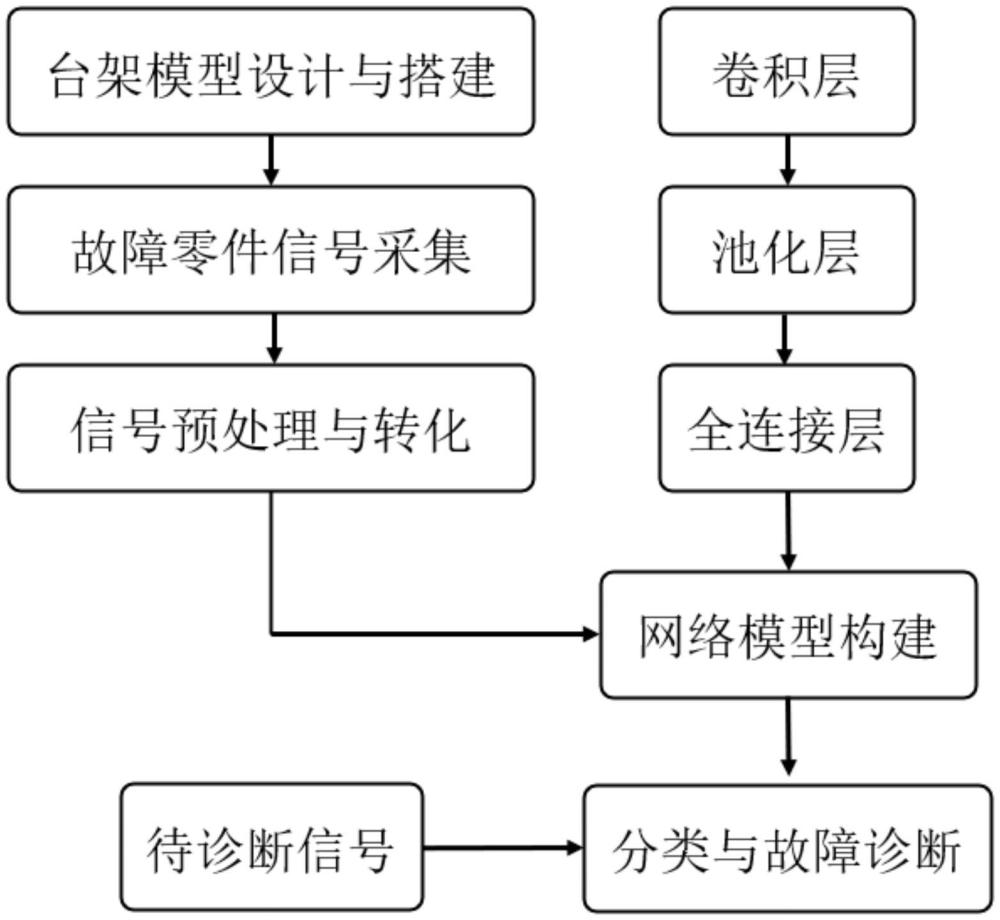
1、为了克服现有技术不足,填补相关技术空白,本发明提出了一种基于迁移式深度学习齿轮箱故障智能诊断方法,该方法优化squeezenet迁移式网络模型算法,改进卷积、池化、激活、全连接层算法模型,对梯度下降与反向传播算法优化,设计齿轮箱故障实验台架模型并搭建实验台架,加载不同故障零件工况采集振动信号,预处理原始信号并导入网络进行训练,矫正网络参数训练提高模型准确率,实现对齿轮箱故障零件的智能诊断。
2、本发明解决其技术问题所采用的技术方案如下:一种基于迁移式深度学习齿轮箱故障智能诊断方法,其特征在于,包括以下步骤:
3、步骤(1):建立基于squeezenet迁移式深度学习模型优化的网络模型框架,搭建基本层级卷积算法模型:
4、
5、其中,为第n个输出层第i个值,为第n-1个输入层第j个值,为卷积核第j个权重参数,为第i个偏置参数,mi表示与卷积核滑动部分进行内积部分第i个值;搭建relu激活函数对卷积层输出结果进行激活:
6、
7、其中,x为激活函数输入,f(x)为激活函数输出特征,max表示取最大值;通过最大池化层压缩激活特征数量:
8、
9、其中,xnij为池化输入层在池化滑动窗口区域qij的第n个数据,ynij为池化输出层在池化滑动窗口区域qij的第n个数据,p为滑动窗口区域上限,q为滑动窗口区域下限;最后通过全连接层算法模型平铺模型特征数据并输出结果:
10、
11、其中,zj为全连接层第j个输出数据,u为输入特征图个数,m为全连接层神经元个数,bj为全连接层偏置参数,yi为输入全连接层的展开一维向量第i个;wi,j为全连接层偏置参数;
12、步骤(2):建立神经网络梯度下降与反向传播算法,采用交叉熵损失函数计算损失量:
13、
14、其中c(w,b)代表损失函数,w代表神经网络中每一层的权重,b代表神经网络中每一层的偏置,y代表目标输出,a代表神经元实际输出,n为输出种类数量,i为当前所在层级数;计算该损失函数对权重与偏置的偏导:
15、
16、其中为损失函数对权重的偏导,为损失函数对偏置的偏导,代表偏导,j为总层级数量,y代表目标输出,f(x)为激活函数,f'(x)为激活函数导数,x为当前层级输入特征,u为输入特征图个数;引入权重与偏置更新公式:
17、
18、其中wnew为修改后的权值,bnew为修改后的偏置,w代表神经网络中每一层的权重,b代表神经网络中每一层的偏置,η为算法的学习率,l(w,b,y,x)为模型损失函数,为损失函数梯度,x代表网络模型每层的输入数据,y代表网络模型
19、每层的输出数据;结合卷积算法公式得损失函数关于卷积层的损失值的偏导:
20、
21、其中代表损失函数关于卷积层的损失值的偏导,yl(i,j)为卷积层损失值,l为模型损失函数,l为卷积层数,i、j分别为卷积层对应第i、j个特征;建立卷积层输入值偏导求解模型:
22、
23、其中为卷积层输入值偏导,代表损失函数关于卷积层的损失值的偏导,xl(j)为层的输入值,为卷积核,j为当前所在层级数,建立卷积核偏导求解模型:
24、
25、其中代表损失函数关于卷积层的损失值的偏导,代表卷积核偏导,结合池化层算法得损失函数关于池化层al(i,t)的偏导:
26、
27、其中代表损失函数关于池化层的偏导,t为池化层当前神经元层级,tm为池化层总神经元层级,为池化层中间参数偏导,为中间参数关于池化层的偏导;全连接层的权重与偏置关于损失函数的偏导计算:
28、
29、其中为全连接层的权重关于损失函数的偏导,为全连接层的偏置关于损失函数的偏导,为全连接层中间参数关于损失函数的偏导,为全连接层的权重关于中间参数的偏导,为全连接层的偏置关于中间参数的偏导,al(i,t)为池化层输出;采用adam迭代算法更新模型参数:
30、
31、其中t为迭代时间,mt为当前动量,mt+1为下一时刻动量,β1为一阶矩衰减系数,β2为二阶矩衰减系数,δ为给定常数,vt+1为调整量,θt为当前时刻更新参数,θt+1为下一时刻更新参数,为当前时刻损失函数梯度,α为学习率,ji(θt)为目标函数;
32、步骤(3):构建优化后的网络模型基本框架,由输入数据集-23个基本层级-输出结果组成,其中第1、3、5、8、10、13、15、17、19、22层为步骤(1)所诉基本卷积层与激活函数组成,第2、7、12、23层为步骤(1)所诉基本池化层,第4、6、9、11、14、16、18、20为步骤(1)所诉两个卷积层堆叠而成,第21层为下采样层,连接所有层级后组成迁移式神经网络模型框架;
33、搭建齿轮箱故障实验台架,包含驱动电机、扭矩传感器、齿轮箱、制动器、控制系统、数据采集系统、速度传感器;其中驱动电机输入动力,驱动齿轮箱运行并连接制动器作为负载,扭矩传感器处于驱动电机与齿轮箱之间测量扭矩,速度传感器处于齿轮箱与制动器旁测量转速,速度采集系统实时采集系统所有运行数据,控制系统控制装置运行工况;
34、步骤(4):加载工况并采集原始信号,加载不同故障零件,包括但不限于缺齿、断齿、点蚀、裂纹故障齿轮与内圈故障、外圈故障、滚动体故障轴承,更换不同故障零件测量齿轮箱系统各零件振动信号作为诊断原始信号;
35、对测量原始信号进行预处理设置,将每2000个采集点信息转化为单个输入图片,取消图片边框并统一颜色,每个种类故障图片转化100张以上,并进行随机y向旋转-90°~90°与随机缩放1~2倍的去过拟合操作,对各种类故障命名特征标签;
36、输入预处理后的图片数据集到网络模型的第1层,对验证频率、小批量数量、最大迭代次数进行设定,经过训练后在输出端得到关于每个种类故障的判断准确率与损失函数,保留网络模型参数;采集待验证信号输入训练完毕的网络模型得到诊断结果。
37、与现有技术相比,本发明的有益效果:提出的基于迁移式深度学习齿轮箱故障智能诊断方法能够对齿轮箱关键零件进行故障智能诊断,完善高端装备动力传动系统诊断理论体系,为齿轮箱健康监测领域提供强力支撑。
- 还没有人留言评论。精彩留言会获得点赞!