一种轨迹确定方法、装置、车辆及存储介质
本技术涉及定位,尤其涉及一种轨迹确定方法、装置、车辆及存储介质。
背景技术:
1、轨迹确定是一种辅助定位技术,利用一系列传感器、算法和数据处理技术,实时确定车辆在道路上的位置、速度和航向。
2、现有技术在进行智能车辅助定位时,通常包括以下几种方式:使用gps确定车辆的精确位置,使用惯性测量单元确定车辆的加速度和角速度,结合这些信息估算出车辆的行驶轨迹;使用多摄像头捕获技术结合视觉算法的特征匹配与运动估计算法,计算行驶轨迹;通过发射和接收激光或无线电波,测量周围物体的距离和速度,通过滤波和数据融合算法估算出车辆的行驶轨迹;通过物理模型,考虑车辆的质量、速度、转向角度、摩擦力等因素,计算车辆的行驶轨迹。
3、但是,现有技术在实现时,存在成本较高、误差较大、使用效果不好的问题。
技术实现思路
1、本技术提供一种轨迹确定方法、装置、车辆及存储介质,用以解决现有技术在实现时,存在的成本较高、误差较大、使用效果不好的问题。
2、第一方面,本技术提供一种轨迹确定方法,包括:
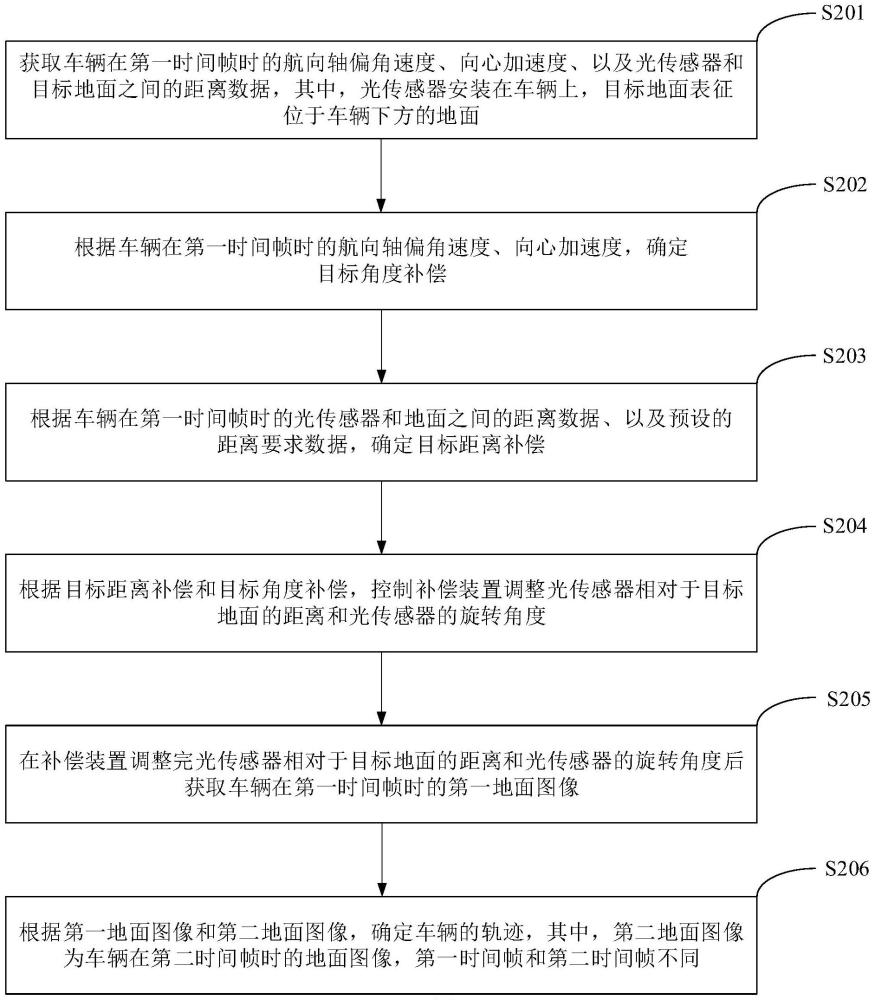
3、获取车辆在第一时间帧时的航向轴偏角速度、向心加速度、以及光传感器和目标地面之间的距离数据,其中,光传感器安装在车辆上,目标地面表征位于车辆下方的地面;
4、根据车辆在第一时间帧时的航向轴偏角速度、向心加速度,确定目标角度补偿;
5、根据车辆在第一时间帧时的光传感器和地面之间的距离数据、以及预设的距离要求数据,确定目标距离补偿;
6、根据目标距离补偿和目标角度补偿,控制补偿装置调整光传感器相对于目标地面的距离和光传感器的旋转角度;
7、在补偿装置调整完光传感器相对于目标地面的距离和光传感器的旋转角度后,获取车辆在第一时间帧时的第一地面图像;
8、根据第一地面图像和第二地面图像,确定车辆的轨迹,其中,第二地面图像为车辆在第二时间帧时的地面图像,第一时间帧和第二时间帧不同。
9、在本技术中,根据车辆在第一时间帧的航向轴偏角速度、向心加速度,确定目标角度补偿,包括:
10、确定角度偏差控制模型,其中,角度偏差控制模型满足:
11、
12、其中,ua(t)为目标偏向角,ea(t)为目标角度差,为根据车辆航向轴偏角的角速度与加速度计测量的向心加速度确定的车辆在第一时间帧的行驶角度与预设角度的差,kap、kai、kad为经过第一bp神经网络计算后输出的自适应调节参数,t为目标时间区间;
13、根据车辆在第一时间帧时的航向轴偏角速度、向心加速度,确定目标角度差;
14、根据目标角度差和角度偏差计算控制模型,确定目标角度补偿。
15、在本技术中,根据车辆在第一时间帧时的光传感器和地面之间的距离数据、以及预设的距离要求数据,确定目标距离补偿,包括:
16、确定距离偏差控制模型,其中,距离偏差控制模型满足:
17、
18、其中,ud(t)为目标距离补偿,ed(t)为超声波传感器的距离数据与预设距离数据的差值,t为目标时间区间,kd、kdi、kdd为经过第二bp神经网络计算后输出的自适应调节参数;
19、根据车辆在第一时间帧时的光传感器和地面之间的距离数据、以及预设的距离要求数据,确定目标距离差;
20、根据目标距离差和距离偏差计算模型,确定目标距离补偿。
21、在本技术中,补偿装置包括:
22、补偿装置架体,安装于车辆的本体;
23、旋转控制电机,设有角度补偿转轴,并通过角度补偿转轴与光传感器驱动连接;
24、位置控制单元,包括安装在补偿装置架体上的位置控制电机和电机滑台,其中,光传感器通过旋转控制电机安装于电机滑台,位置控制电机上设有驱动转杆,驱动转杆与电机滑台驱动连接,并控制电机滑台在补偿装置架体上沿高度方向移动;
25、根据目标距离补偿和目标角度补偿,控制补偿装置调整光传感器相对于目标地面的距离和光传感器的旋转角度,包括:
26、根据目标距离补偿,生成距离补偿控制信号;
27、向补偿装置的位置控制电机发送距离补偿控制信号,以使位置控制电机根据距离补偿控制信号,控制电机滑台在补偿装置架体上的位置来调整光传感器相对于目标地面的高度距离;
28、根据角度补偿值,生成角度补偿控制信号;
29、向补偿装置的旋转控制电机发送角度补偿控制信号,以使旋转控制电机根据角度补偿控制信号,控制角度补偿转轴调整光传感器的旋转角度。
30、在本技术中,根据第一地面图像和第二地面图像,确定车辆的轨迹,包括:
31、根据第一地面图像,得到第一灰度图像,以及根据第二地面图像,得到第二灰度图像;
32、根据第一灰度图像和第二灰度图像中目标像素对的互相关度,确定目标图像位移;
33、根据目标图像位移和光传感器的角度补偿值,确定车辆的轨迹。
34、在本技术中,根据第一灰度图像和第二灰度图像中目标像素对的互相关度,确定目标图像位移,包括:
35、根据第一灰度图像确定第一目标数组,以及根据第二灰度图像,得到第二目标数组,其中,第一目标数组和第二目标数组为二维数组;
36、根据第一目标数组和第二目标数组,确定第一灰度图像和第二灰度图像中目标像素对的互相关度;
37、根据第一灰度图像和第二灰度图像中目标像素对的互相关度,确定目标点的坐标,其中,目标点表征互相关度满足阈值要求的像素;
38、根据目标点的坐标,确定目标图像位移。
39、在本技术中,根据目标图像位移和光传感器的角度补偿值,确定车辆的轨迹,包括:
40、确定光传感器的像素尺寸和成像倍率,其中,像素尺寸根据光传感器中图像采集区域和图像分辨率确定,成像倍率根据光传感器的有效感光面积的边长和感光芯片的尺寸确定;
41、根据像素尺寸和目标图像位移,确定目标地面位移;
42、根据目标地面位移和感光芯片的尺寸,确定目标比值;
43、根据成像倍率、目标地面位移、以及目标比值,确定目标系数;
44、根据目标系数和角度补偿值,确定水平面投影长度;
45、根据水平面投影长度,确定车辆轨迹。
46、第二方面,本技术提供一种轨迹确定装置,包括:
47、第一获取模块,用于获取车辆在第一时间时的航向轴偏角速度、向心加速度、以及光传感器和目标地面之间的距离数据,其中,光传感器安装在车辆上,目标地面表征位于车辆下方的地面;
48、第一确定模块,用于根据车辆在第一时间帧的航向轴偏角速度、向心加速度,确定目标角度补偿;
49、第二确定模块,用于根据车辆在第一时间帧时的光传感器和地面之间的距离数据、以及预设的距离要求数据,确定目标距离补偿;
50、修正模块,用于根据目标距离补偿和目标角度补偿,控制补偿装置调整光传感器相对于目标地面的距离和光传感器的旋转角度;
51、第二获取模块,用于在补偿装置调整完光传感器相对于目标地面的距离和光传感器的旋转角度后,获取车辆在第一时间时的第一地面图像;
52、执行模块,用于根据第一地面图像和第二地面图像,确定车辆的轨迹,其中,第二地面图像为车辆在第二时间时的地面图像,第一时间帧和第二时间不同。
53、第三方面,本技术提供一种车辆,包括:处理器、以及与处理器通信连接的存储器;
54、存储器存储计算机执行指令;
55、处理器执行存储器存储的计算机执行指令,以实现本技术的方法。
56、第四方面,本技术提供一种计算机可读存储介质,包括:计算机可读存储介质中存储有计算机执行指令,计算机执行指令被处理器执行时用于实现本技术的方法。
57、第五方面,本技术实施例提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现本技术的方法。
58、本技术提供的一种轨迹确定方法、装置、车辆及存储介质,通过获取车辆在第一时间帧时的航向轴偏角速度、向心加速度、以及光传感器和目标地面之间的距离数据,其中,光传感器安装在车辆上,目标地面表征位于车辆下方的地面;根据车辆在第一时间帧时的航向轴偏角速度、向心加速度,确定目标角度补偿;根据车辆在第一时间帧时的光传感器和地面之间的距离数据、以及预设的距离要求数据,确定目标距离补偿;根据目标距离补偿和目标角度补偿,控制补偿装置调整光传感器相对于目标地面的距离和光传感器的旋转角度;在补偿装置调整完光传感器相对于目标地面的距离和光传感器的旋转角度后,获取车辆在第一时间帧时的第一地面图像;根据第一地面图像和第二地面图像,确定车辆的轨迹,其中,第二地面图像为车辆在第二时间帧时的地面图像,第一时间帧和第二时间帧不同的手段,通过利用补偿装置对光传感器进行距离补偿和角度补偿,保证光传感器捕获图像的清晰度和准确度,通过利用光感器收集路面图像,从而确定车辆的轨迹,本技术提供的方法性能稳定,使用光传感器采集图像进一步得到车辆位移,不易受环境和恶劣天气影响,减小了操作误差。
- 还没有人留言评论。精彩留言会获得点赞!