一种基于状态观测器的两自由度电液振动台时滞补偿方法
本发明涉及工程结构实时混合试验技术,特别是一种基于状态观测器的两自由度电液振动台时滞补偿方法。
背景技术:
1、在实时混合试验中,工程结构的一部分用振动台系统进行加载,余下的部分通过数值仿真的方式计算其响应。振动台系统时滞的存在,不仅影响试验效果,甚至会对试件及设备造成不可逆的破坏,因此有必要补偿振动台系统的时滞,提高振动台的加载精度和稳定性,使实时混合试验方法的应用更加广泛和可靠。
2、传统的实时混合试验时滞补偿,通常采用基于模型参数在线识别的方法,利用最小二乘法建立振动台系统参考位移与实测位移间的非线性关系。但使用最小二乘法估计参数时,参数的收敛速度较慢,难以实现高精度的时滞补偿。
3、中国专利cn202211119718.3公开了《基于ukf的实时混合试验二阶段自适应时滞补偿方法、系统及混合试验方法》,该项专利技术首先通过多项式外插方法对伺服加载系统进行定时滞补偿,然后利用基于ukf的自适应时滞补偿方法进行幅值修正、变时滞补偿。但该专利对于单自由度电液振动台具有一定时滞补偿效果,但难以直接应用于两自由度电液振动台的时滞补偿。
技术实现思路
1、为解决现有技术存在的上述问题,本发明要设计一种能进一步提高时滞补偿精度的基于状态观测器的两自由度电液振动台时滞补偿方法。
2、为了实现上述目的,本发明的技术方案如下:
3、一种基于状态观测器的两自由度电液振动台时滞补偿方法,所述的两自由度电液振动台包括两个垂直向阀控缸机构、大虎克铰、支座、上平台、下平台和计算机;所述的两个垂直向阀控缸机构分别为1号阀控缸机构和2号阀控缸机构;所述的1号阀控缸机构和2号阀控缸机构的下端分别通过各自的球铰与下平台连接、上端分别通过各自的球铰与上平台连接,所述的上平台通过大虎克铰与支座相连,所述的支座下端与下平台固定连接。所述的上平台绕大虎克铰中心进行横摇和纵摇运动。所述计算机通过控制线与两个垂直向阀控缸机构连接,所述计算机中安装基于状态观测器的两自由度电液振动台时滞补偿系统。
4、设大虎克铰中心为控制点,在控制点建立oxyz坐标系。ox轴正方向由o点指向1号阀控缸机构及2号阀控缸机构上端球铰中心的连线的中心;oz轴正方向垂直指向下平台;ox、oy及oz三个坐标轴的方向满足右手定则。d1为1号阀控缸机构与2号阀控缸机构上端球铰中心的连线距离的一半,d2为大虎克铰中心与1号阀控缸机构上端球铰中心的连线在ox轴上的投影长度。
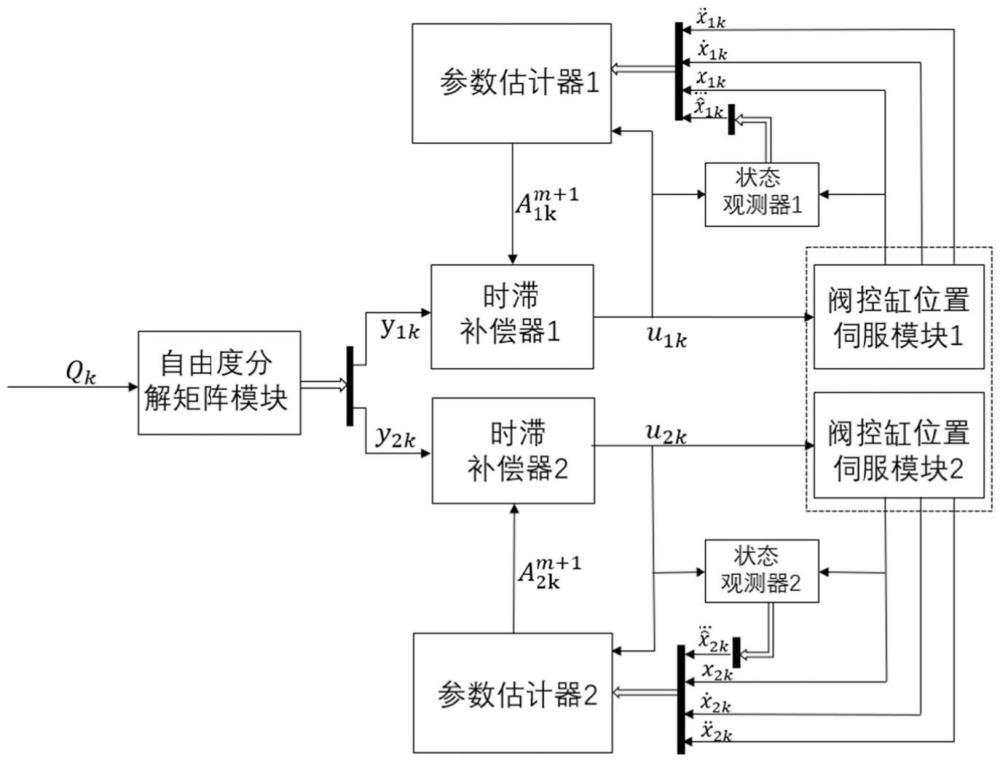
5、所述基于线性状态观测器的两自由度电液振动台时滞补偿系统包括自由度分解矩阵模块、时滞补偿器1、时滞补偿器2、参数估计器1、参数估计器2、状态观测器1、状态观测器2、阀控缸位置伺服模块1和阀控缸位置伺服模块2,所述自由度分解矩阵模块的输出信号分别输入时滞补偿器1和时滞补偿器2;所述时滞补偿器1的输出信号分别输入参数估计器1、状态观测器1和阀控缸位置伺服模块1,所述阀控缸位置伺服模块1的输出信号分别输入1号阀控缸机构、参数估计器1和状态观测器1,所述状态观测器1的输出信号输入参数估计器1;所述时滞补偿器2的输出信号分别输入参数估计器2、状态观测器2和阀控缸位置伺服模块2,所述阀控缸位置伺服模块2的输出信号分别输入2号阀控缸机构、参数估计器2和状态观测器2,所述状态观测器2的输出信号输入参数估计器2;
6、所述时滞补偿方法包括以下步骤:
7、a、定义两自由度振动台位移参考信号为qk,qk为2×1列向量,表达式为:
8、qk=[rxk ryk]t
9、式中,rxk为横摇自由度的位移参考信号,ryk是纵摇自由度的位移参考信号,上标t表示转置,k为时间步序号。
10、b、将位移参考信号qk作为自由度分解矩阵模块输入信号,y1k、y2k作为自由度分解矩阵模块输出信号,计算公式为:
11、[y1k y2k]t=jdqk
12、式中,y1k是阀控缸位置伺服模块1的参考信号,y2k是阀控缸位置伺服模块2的参考信号。矩阵jd的表达式为:
13、
14、c、首先在前n个时间步,即在k=1、2、…、n时,将时滞补偿器1和时滞补偿器2中的数据进行初始化;其中,n为时间步总数、由工程师现场设置。选取其中,θ1、θ2、θ3和θ4均为取值在0~1的正数,由工程师现场设置。在时滞补偿器1中,将信号y1k作为时滞补偿器1的输入信号,时滞补偿器1的输出位移信号u1k的计算公式为:
15、
16、式中,是y1k的一阶微分,是y1k的二阶微分,是y1k的三阶微分。将时滞补偿器1的输出信号u1k同时作为参数估计器1、状态观测器1、阀控缸位置伺服模块1的输入信号,驱动1号阀控缸机构运动。
17、在时滞补偿器2中,将信号y2k作为时滞补偿器2的输入信号,计算时滞补偿器2的输出位移信号u2k,计算公式为:
18、
19、式中,是y2k的一阶微分,是y2k的二阶微分,是y2k的三阶微分。将时滞补偿器2的输出信号u2k同时作为参数估计器2、状态观测器2、阀控缸位置伺服模块2的输入信号,驱动2号阀控缸机构运动。
20、d、令j=1,j为时滞补偿器、阀控缸位置伺服模块、状态观测器、参数估计器和阀控缸机构的序号。
21、e、在状态观测器j中,将信号ujk、xjk作为状态观测器j的输入信号,其中,xjk为阀控缸位置伺服模块j的输出位移信号。将信号ujk乘以列向量b、信号xjk乘以列向量g和向量乘以矩阵e-gc后同时输入到求和器中进行求和运算,求和器的输出信号的计算公式为:
22、
23、式中,为4×1的列向量,由四个变量组成,其中,为阀控缸位置伺服模块j输出位移信号的估计值,为阀控缸位置伺服模块j输出加速度信号估计值,为阀控缸位置伺服模块j输出加速度的一阶导数信号估计值,为阀控缸位置伺服模块j中伺服阀阀芯位移估计值,的表达式为:
24、
25、四个变量的初值均为0;为向量的一阶导数,为4×1的列向量,表达式为:
26、
27、b为4×1的列向量,表达式为:
28、
29、g为4×1的列向量,表达式为:
30、g=[w0 w1 w2 w3]t
31、c为1×4的行向量,表达式为:
32、c=[1 0 0 0]
33、e为4×4的矩阵,表达式为:
34、
35、式中,m为液压缸负载质量、ctc为液压缸总泄露系数、kc为阀的流量-压力系数、a1为液压缸活塞有效面积、vt为液压缸两腔总容积、βe为油液体积弹性模量、τv为伺服阀动态特性转折频率的倒数、kq为伺服阀的流量增益系数、ki为伺服阀电气增益系数、kf为位置反馈增益系数。其中,w0、w1、w2、w3均由工程师现场设置。
36、将求和器的输出信号作为积分器的输入信号,积分器的输出信号同时作为状态观测器j的输出信号、计算公式为
37、
38、式中,s为拉普拉斯变换中的复变量。
39、f、当k≥n+1时,计算参数估计器j的输出信号
40、f1、令迭代计数器m=1。
41、
42、f2、采集时滞补偿器j的输出信号ujk、阀控缸位置伺服模块j的输出位移信号xjk、速度信号加速度信号以及中的加速度一阶导数信号作为参数估计器j的输入信号。
43、f3、基于高斯牛顿法的第k时间步第m+1次迭代时参数估计器j的输出信号的迭代计算公式为:
44、
45、式中,和均为4×1的列向量,表达式为:
46、
47、
48、其中,和分别为第k时间步第m+1次迭代时参数估计器j中的位移修正系数、速度修正系数、加速度修正系数和加速度一阶导数修正系数。
49、为n×4的矩阵、表达式为:
50、
51、u为n×1的列向量、表达式为:
52、u=[uj(k-n) uj(k-n+1) … uj(k-1)]t
53、j为n×4的矩阵、表达式为:
54、
55、i为4×4的单位矩阵,修正系数ε为正实数,迭代步长α为0~1的正数,ε、α均由工程师现场设置。
56、f4、如果满足则转步骤g;其中,μ由工程师现场设置,||·||2为计算向量2范数。否则,令m=m+1,转步骤f3。
57、g、将信号yjk作为时滞补偿器j的输入信号,时滞补偿器j的输出信号ujk计算公式为:
58、
59、将信号ujk作为阀控缸位置伺服模块j的输入信号,驱动阀控缸机构j运动。
60、h、如果j=2,则转步骤d,否则,令j=j+1,转步骤e。
61、与现有技术相比,本发明的有益效果如下:
62、1.本发明通过使用状态观测器j得到阀控缸位置伺服模块j的加速度一阶导数信号估计值利用参数估计器j的输出信号中的四个参数计算时滞补偿器j的输出信号,进一步减小阀控缸位置伺服模块j的输出位移与参考位移间的误差。采用传统的时滞补偿方法时,两自由度电液振动台横摇自由度的位移输出信号与参考位移信号的时域峰值误差在10%左右。采用本发明方法,可将两自由度电液振动台横摇自由度的位移输出信号与参考位移信号的时域峰值误差控制在5%以内,明显提高了实时混合试验中两自由度电液振动台的时滞补偿效果。
63、2.本发明的所有步骤均可通过软件编程实现。在cpu为intel pd 2.6g、内存为1g的advantech工控机ipc-610上测试,算法的运行周期小于1ms,能够满足实时混合试验的工况要求,所以本发明易于采用计算机数字控制实现。
- 还没有人留言评论。精彩留言会获得点赞!