一种智能遥感测绘方法及系统与流程
本发明涉及智能遥感,具体为一种智能遥感测绘方法及系统。
背景技术:
1、智能遥感是一个快速发展的领域,它通过人工智能技术提高了遥感数据分析的效率和准确性,对于地理信息系统(gis)、环境监测、城市规划等多个领域具有重要意义;
2、专利号为cn114663790b的申请公开了一种智能遥感测绘方法及系统,涉及人工智能领域。主要包括:采集遥感图像,并利用k-means聚类算法将遥感图像分成多个聚类块;根据各聚类块中所包含的像素点分别在三通道中的像素值,对各聚类块进行类型划分,以将遥感图像中可能存在的裸地、林地、建筑物以及背景部分彼此区分开来;将每一类型的聚类块组成的图像分别作为对遥感图像分割后每一类型对应的分割图像。本发明实施例实现对遥感图像的分割处理,避免人为进行标注的主观性,进而获得对于遥感图像更为稳定且准确的分割结果。
3、针对于智能遥感的相关测绘时,一般由操作人员来选定相关的特征点位,再将特征点位进行相关连线,来确定其相关无人的测绘路线,但此种方式,未针对其对应区域的遥感数据进行相关分析,会导致其测绘路线并不是最佳状态,从而会因路线的高低差异过大,导致无人机在测绘过程中耗电量较大,从而影响相关的测绘速率。
技术实现思路
1、针对现有技术的不足,本发明提供了一种智能遥感测绘方法及系统,解决了未针对其对应区域的遥感数据进行相关分析,会导致其测绘路线并不是最佳状态的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种智能遥感测绘方法,包括以下步骤:
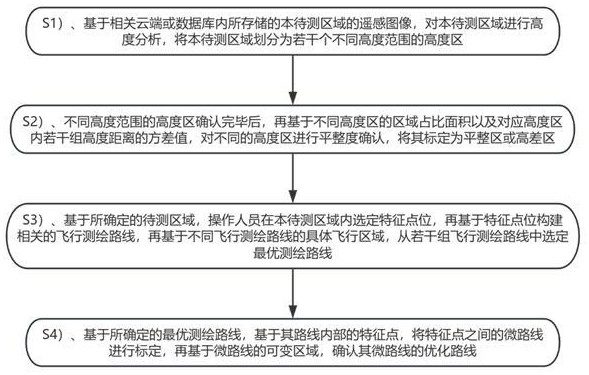
3、s1)、基于相关云端或数据库内所存储的本待测区域的遥感图像,对本待测区域进行高度分析,将本待测区域划分为若干个不同高度范围的高度区,具体方式为:
4、s11、基于遥感图像将本待测区域分解为若干个待测点位,并依次确认若干个待测点位的高度距离gi,其中i代表不同的待测点位,其高度距离均基于同一水平面进行确定,且水平面为预设的基准面;
5、s12、将若干个待测点位的高度距离gi按照数值从小至大的方式进行排序,生成高度距离序列,从高度距离序列的最小值开始依次往后确定方差值fc,若fc<y1,从高度距离序列再选取后续的高度距离进行方差确定直至fc≥y1时停止,将本次所添加的高度距离标定为异常距离值,其中y1为预设值;
6、从异常距离值开始往后依次选取高度距离进行方差处理,采用相同的方式将方差值fc与y1进行比对,基于比对结果,确定第二阶段所对应的异常距离值;
7、s13、基于高度距离序列内所确定的若干组异常距离值,将本高度距离序列内第一组异常距离值前端的若干组高度距离划分为第一组高度微序列,再将本高度距离序列内第二组异常距离值前端至第一组异常距离值之间的若干组高度距离划分为第二组高度微序列,包括第一组异常距离值,依此类推,将高度距离序列划分为若干组高度微序列;
8、s14、基于不同高度微序列所对应的不同区域,确定对应区域的高度范围,以此来确定不同高度范围的高度区,并按照数值从小至大的方式将高度范围进行排序且带有排序标记p;
9、s2)、不同高度范围的高度区确认完毕后,再基于不同高度区的区域占比面积以及对应高度区内若干组高度距离的方差值,对不同的高度区进行平整度确认,将其标定为平整区或高差区:
10、s21、确认不同高度范围对应高度区位于整个待测区域的面积占比zk,其中k代表不同高度范围所对应的高度区,其中面积占比zk=高度区正视平面面积÷待测区域的正视平面面积;
11、s22、再确定对应高度区内其属于此高度范围的若干组高度距离的方差值,并将所确定的方差值标定为fk,其中k代表不同的高度区;
12、s23、采用pk=zk÷fk确认对应高度区的平整度pk,将平整度pk与预设值y2进行比对,当pk>y2,将此高度区标定为平整区;
13、s3)、基于所确定的待测区域,操作人员在本待测区域内选定特征点位,再基于特征点位构建相关的飞行测绘路线,再基于不同飞行测绘路线的具体飞行区域,从若干组飞行测绘路线中选定最优测绘路线:
14、s31、基于操作人员所选定的若干组特征点位,从初始点开始,往后依次选定不同的特征点位,再依次进行随机选定,生成若干组飞行测绘路线;
15、s32、将不同飞行测绘路线的飞行距离分别标定为jq,其中q代表不同的飞行测绘路线,再确认对应飞行测绘路线属于其平整区或高差区的路线长度,将属于平整区的路线长度标定为dpq,将属于高差区的路线长度标定为dgq;
16、s33、再确认其飞行测绘路线的飞行跨度值,确认其飞行测绘路线所经过的高度区,并按照飞行测绘路线将高度区进行依次排序,依据前后依次排序的高度区,将前后相邻高度区的排序标记p的差值进行确认,其差值>0,将所确认的若干组差值进行求和,确定其飞行跨度值kdq;
17、s34、采用采用pdq=jq×c1+(dgq÷dpq)×c2+kdq×c3确定其对应飞行测绘路线的评定值pdq,其中c1、c2以及c3均为预设的固定系数因子,从若干组飞行测绘路线所对应的不同评定值pdq,从若干组评定值pdq中选取最小值,将最小值所对应的飞行测绘路线标定为最优测绘路线;
18、s4、基于所确定的最优测绘路线,基于其路线内部的特征点,将特征点之间的微路线进行标定,再基于微路线的可变区域,确认其微路线的优化路线,具体方式为:
19、s41、基于最优测绘路线以及内部的特征点,将特征点之间的路线进行提取并标定为微路线,基于微路线的飞行方向,确定其左右垂直方向,并依据此左右垂直方向以及将微路线作为中心线,往左右垂直方向平移x1m确认一组辐射区域,其辐射区域的中心线为微路线;
20、s42、将此辐射区域分别为若干个平行线,且每个平行线均与微路线垂直,基于平行线所对应的待测点位,识别其对应待测点位的高度距离gi,将属于同一平行线的若干个高度距离gi进行均值处理,确定均值,再将与均值差值最小的高度距离gi标定为中间值,将其中间值对应的待测点位标定为待连点位,若待连点位存在多组,则选取一组最接近微路线的待连点位作为所选定的点位,若两组待连点位处于最接近状态且与微路线的距离相同,则随机选取一组待连点位即可;
21、s43、按照微路线的飞行方向,将所确定的相邻的待连点位进行连接,生成一组优化路线,再依次对其他微路线采用相同的方式进行处理,确认不同微路线所对应的优化路线;
22、s44、依据后续依次确认的优化路线生成一组最佳执行路线。
23、优选的,所述步骤s23中,当pk≤y2,将此高度区标定为高差区。
24、优选的,还包括:
25、s5、使后续的遥感测绘无人机按照此最佳执行路线进行遥感测绘处理,并将测绘处理数据进行实时传输。
26、优选的,一种智能遥感测绘系统,包括:
27、高度区评定端,基于相关云端或数据库内所存储的本待测区域的遥感图像,对本待测区域进行高度分析,将本待测区域划分为若干个不同高度范围的高度区;
28、数值评定端,将不同高度范围的高度区确认完毕后,再基于不同高度区的区域占比面积以及对应高度区内若干组高度距离的方差值,对不同的高度区进行平整度确认,将其标定为平整区或高差区;
29、最优测绘路线确定端,基于所确定的待测区域,操作人员在本待测区域内选定特征点位,再基于特征点位构建相关的飞行测绘路线,再基于不同飞行测绘路线的具体飞行区域,从若干组飞行测绘路线中选定最优测绘路线;
30、最终优化端,基于所确定的最优测绘路线,基于其路线内部的特征点,将特征点之间的微路线进行标定,再基于微路线的可变区域,确认其微路线的优化路线。
31、本发明提供了一种智能遥感测绘方法及系统。与现有技术相比具备以下有益效果:
32、本发明通过对待测区域的智能遥感图像进行初分析,通过识别其对应点位的高度数据,将待测区域进行高度区域的相关划分,再通过相关的划分结果以及不同区域的平整度表现情况,进行测绘路线的选取,基于对应待测区域的整体表现情况,来确定最佳的测绘路线,后续进行最终选定,方便后续无人机进行遥感测绘,对后续的遥感测绘效果进行保障;
33、其相关的遥感测绘路线得到相关确定后,再进行路线优化,从而使无人的飞行姿态得到有效优化,使后续无人机在执行遥感测绘过程中能得到充分的电量优化,保障测绘效果。
- 还没有人留言评论。精彩留言会获得点赞!