一种棱镜抬升装置外置的外差激光干涉式绝对重力仪
本发明属于绝对重力测试,具体涉及一种棱镜抬升装置外置的外差激光干涉式绝对重力仪。
背景技术:
1、重力仪,也称为重力加速度仪,是确定重力加速度的测量仪器。绝对重力仪是重力仪的一种,在地球物理学、地质学、海洋学等领域具有广泛的应用价值。它可以用于研究地球内部结构、地壳运动、地震活动等问题,为地质勘测、资源开发、灾害预防、量子计量、惯性导航等应用方向提供重要的数据支持。此外,它还可以用于测量地球重力场的微小变化,揭示地球重力场的时空演化规律,为地球科学研究提供重要的数据信息。
2、利用光学干涉方法测量重力值的绝对重力仪称为光学干涉式重力仪,光学干涉式重力仪已经发展到了非常成熟的阶段,它主要由激光干涉系统、高真空自由落体装置、信号采集及处理系统组成。光学干涉式重力仪的激光干涉系统与迈克尔逊干涉仪原理类似,先将一束激光进行分束,其中一束光经过一个处于自由落体运动或只受重力影响的竖直上抛运动的角锥棱镜的反射,另一束光经过固定的反射镜反射,将两者反射光进行合束,通过激光的干涉条纹反映出角锥的运动位移量进而测量出重力的加速度。
3、光学干涉式重力仪的高真空自由落体装置的作用是消除空气阻力对角锥的影响,以及减少空气对折射率的影响。目前的自由落体装置有许多种实现方法,常见的有:通过真空腔内的竖直滑轨将角锥上升,再释放使其做自由落体运动;利用弹射装置将角锥竖直弹起或使用电磁铁将角锥吸附在高处然后释放。不管哪种方式,都需保证角锥的自由下落。
4、因此,激光干涉系统与高真空自由落体装置决定了光学干涉式重力仪的精度和可靠性。
5、申请公布号为cn 103941301 a和cn 111650660 a分别公开了一种弹射式绝对重力仪落体棱镜上抛控制装置及重力测试方法以及一种异步下落差分式绝对重力仪。前者利用弹簧组成的弹射装置将角锥棱镜弹射上升,使得棱镜能够在真空腔中进行一段自由上升和自由下落。在此过程中利用激光干涉的原理,将棱镜的位置信息转移到激光的干涉条纹上并检测条纹的过零位置,再利用自由落体的位移与重力加速度公式拟合得到重力加速度。该装置落体棱镜的运动过程中有只受重力影响的自由上升和自由下落两段位移过程,使得激光干涉时间增加一倍,从而减少了真空腔的高度。后者利用两套自由落体装置使上下两个角锥棱镜分别进行自由落体运动。
6、上述两种设计的传统光学干涉式绝对重力仪的自由落体装置均内置于真空系统中,在装置机械磨损及老化后,更换机械装置需要对真空系统进行破空处理,需要复杂的设备和流程,严重影响了重力仪的使用寿命。
7、因此,光学干涉式绝对重力仪需要新的激光干涉方法解决以上问题,能够外置于真空腔外的棱镜抬升机械装置是一种合理的方案。
技术实现思路
1、为解决现有技术存在的上述技术问题,本发明提供一种棱镜抬升装置外置的外差激光干涉式绝对重力仪,与传统光学干涉式绝对重力仪相比,精度更高、抗干扰能力更强。本发明将角锥棱镜的抬升装置外置到真空腔外部,利用直线电机拉动真空结构中的波纹管,做到真空腔整体加速上升;利用微控器的定时器和预设的物体加速度曲线,做到对电机驱动电流的闭环控制,从而实现对电机运动过程的伺服控制;利用外差激光干涉的方法将角锥运动过程中的位置变化量转化为射频信号的相位变化,使用“正交下混频的数字鉴相方法”和“相位变化量到位移量的解算方法”得到角锥棱镜精确的位移曲线,从而计算出重力加速度。
2、本发明采用的技术方案是:
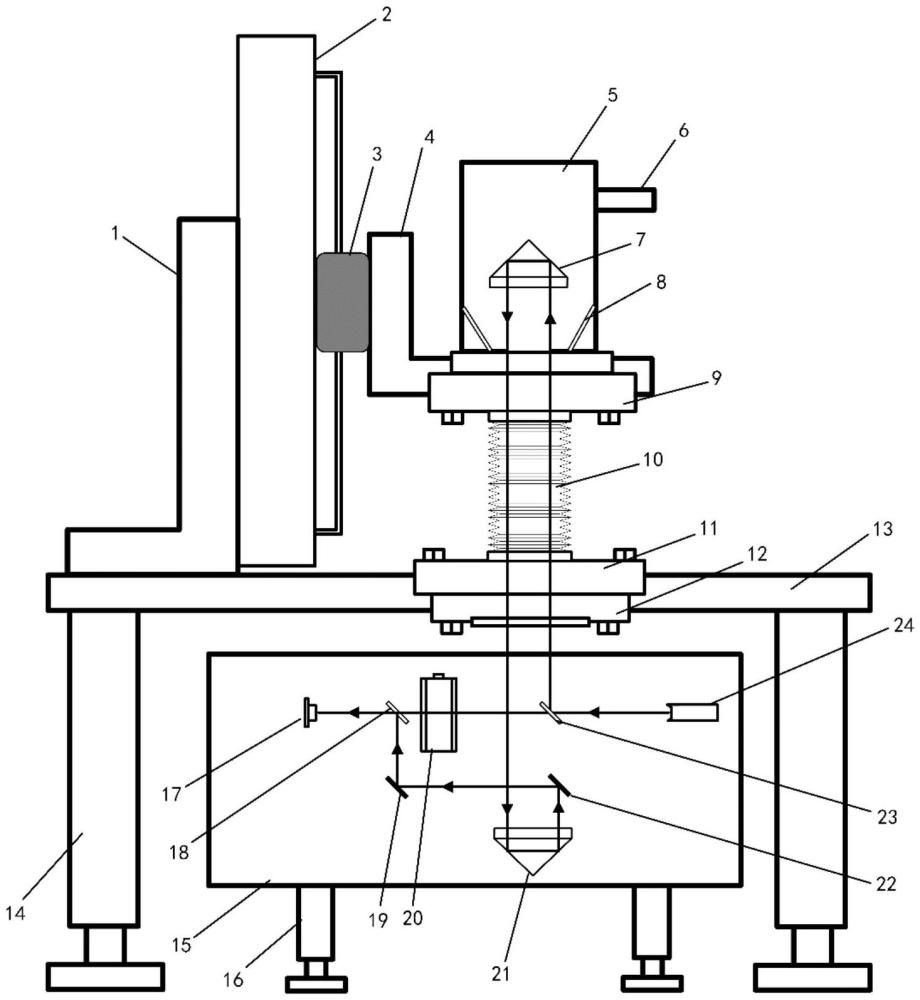
3、一种棱镜抬升装置外置的外差激光干涉式绝对重力仪,其特征在于,包括支撑平台,所述支撑平台上方设置有直线电机、真空腔以及波纹管,所述支撑平台下方设置有光学干涉仪,且与支撑平台不接触;所述支撑平台与所述光学干涉仪分别通过平台支撑脚和干涉仪支撑脚进行调平操作;
4、所述直线电机通过第一支撑结构设置于所述支撑平台上方,所述直线电机上安装有动子,所述动子沿竖直方向上下运动;
5、所述波纹管的上端通过第一法兰固设在第二支撑结构上,所述波纹管的下端通过第二法兰固设在所述支撑平台的上方;所述第二支撑结构呈l型结构,且所述第二支撑结构的上方设置有所述真空腔;所述l型结构的竖直面与所述动子刚性连接,动子运动时带动真空腔同步运动;所述l型结构的水平面上开设有一通孔,所述真空腔底部设置有玻璃管,所述玻璃管的下端穿过所述通孔后与所述波纹管的上端连接;所述真空腔底部通过玻璃管与下方波纹管使用铟封的方法挤压固定,保证真空度;
6、所述支撑平台的底部设置有通光的窗片,所述窗片通过第三法兰固定于所述支撑平台的下方,并且所述窗片位于所述波纹管的中心,用以保证光学干涉过程中,光学干涉仪中激光入射上角锥棱镜,棱镜返回光进入光学干涉仪;
7、所述真空腔的内部设置有上角锥棱镜;所述光学干涉仪的内部设置有下角锥棱镜,所述上角锥棱镜和下角锥棱镜的顶端相对远离;
8、所述光学干涉仪的内部设置有光电二极管、合束镜、第一反射镜、声光调制器、第二反射镜、分束镜和激光准直头,所述激光准直头、分束镜、声光调制器、合束镜以及光电二极管位于同一水平面上且相互对应;位于所述合束镜的下方且与所述合束镜对应的位置设置有所述第一反射镜,位于所述所述分束镜的下方且与所述所述分束镜对应的位置设置有所述第二反射镜,并且所述第一反射镜与所述第二反射镜位于同一水平面;激光通过所述激光准直头,再通过分束镜后分出两束光,其中一束激光竖直向上通过第三法兰下方的窗片进入波纹管内部,再进入真空腔中的上角锥棱镜,在上角锥棱镜内部反射后光束方向变为竖直向下,光束再次通过波纹管、窗片后进入光学干涉仪入射至下角锥棱镜,再通过下角锥棱镜反射,续而依次经过第二反射镜、第一反射镜反射后进入合束镜;另一束激光透射过分光镜后进入声光调制器,通过声光调制器衍射移频后入射合束镜,合束的光进入光电二极管,将光信号激发为电流信号,通过采样电阻和放大整形电路转换为电信号。
9、进一步的,所述直线电机与所述第一支撑结构刚性连接。
10、进一步的,所述真空腔的侧面设有用于分子泵抽真空的抽气管,用以连接分子泵抽真空。
11、进一步的,所述真空腔的内部安装有橡胶的倒锥型保护套,位于上角锥棱镜的下方,在上角锥棱镜下落过程中保护棱镜。
12、进一步的,所述直线电机通过微型控制器mcu驱动进行伺服运动控制。
13、本发明中的波纹管是指用可折叠皱纹片沿折叠方向连接成的管状弹性敏感元件。波纹管具有弹性,在压力、轴向力、横向力或弯矩作用下能产生位移。波纹管可以用作密封隔离元件,将两种介质分隔开来。本发明中的外差激光干涉是一种检测方式,采用一定频差的双频光束作为载波信号。当激光探测到一个物体的位移时,由于多普勒效应,被物体散射或反射的光的频率将会发生多普勒移频,即物体的位移对光进行了调制。
14、本发明中的正交下混频是一种常用的信号处理方法,主要用于将射频信号转换为中频信号。这种方法的基本原理是先对模拟信号进行a/d采样数字化,然后与两个正交本振序列相乘,再通过数字低通滤波来实现。
15、与现有技术相比,本发明的有益效果体现在:
16、1、本发明利用外差激光干涉方法代替传统的激光干涉方法,将角锥棱镜位移变化量转化为射频信号的相位变化,再利用下混频和数字鉴相的信号处理方法,提升位移的测量精度,从而提升了绝对重力仪的测量精度。
17、2、相较于传统重力仪中棱镜先被抬升至特定高度后,传动装置往下做加速度略大于重力加速度的运动,从而使棱镜做自由落体运动的方法;作为对比,本发明通过直接对电机加速度的曲线进行伺服控制,做到真空腔体在棱镜上抛和自由下落过程中始终与棱镜保持一定的距离,从而达到棱镜快速被抛起且下落到真空腔时相对速度较低避免了棱镜的损坏;且棱镜在上抛和自由下落的两段位移过程中都只受到重力的影响,使得重力测量时间增加一倍,有效的减少了真空腔的高度。
18、3、本发明相较于传统的棱镜机械传动装置,机械抬升装置外置于真空腔外侧,作为重力仪中的可拆卸的分零部件,更换方便,不需要对真空腔进行破空处理,不会影响重力值的测量。
19、4、本发明通过微控器伺服控制真空腔的运动过程,能够使角锥棱镜同样达到上抛和自由落体两个运动过程,且能够做到真空腔与棱镜保持一定的距离,使棱镜下落时相对速度较小,更不容易使角锥损坏。本发明使用的外差激光干涉方法精度比该装置传统激光干涉方法精度更高。
20、5、本发明采用的光学干涉方法,解算加速度不需要棱镜下落时的初始位置,由于初始位置没有可靠手段精确测量,所以本发明的测量精度高。
21、6、本发明根据真空腔运动中的位移曲线,通过微控器的定时器输出脉宽调制信号对直线电机进行伺服控制。真空腔带动棱镜抬升做上抛运动后提前向下加速,使棱镜做自由落体运动,棱镜的两段运动过程都只受到重力的影响,从而使重力值测量时间增加一倍,并减少了真空腔的高度。
22、7、本发明通过将传统光学干涉式绝对重力仪中控制角锥棱镜运动的机械装置外置于真空系统外部,避免了机械结构磨损、老化导致的重力仪寿命减少。
23、8、本发明能够实现棱镜机械抬升结构的更换,延长重力仪的使用寿命;改进光学干涉的实现方法提高重力值的测量精度。
- 还没有人留言评论。精彩留言会获得点赞!