一种针头检测系统及方法与流程
本技术涉及医用针头检测领域,具体涉及一种针头检测系统及方法。
背景技术:
1、注射器的出现是医疗用具领域一次划时代的革命,用针头抽取、注入气体或液体的这个过程叫做注射,注射器由前端带有小孔的针筒以及与之匹配的活塞芯杆组成,用来将少量的液体或气体注入到其他方法无法接近的区域或者从那些地方抽出,在芯杆拔出的时候液体或者气体从针筒前段小孔吸入,在芯杆推入时将液体或者气体挤出。
2、由于在生产过程中可能会存在不合规注射器,在运输过程中,注射器的针头也可能因为外力产生变形,因此注射器在使用前,一般会观察检测针头是否是合规的。在配药机中使用时,由于配药过程无人工参与,若不对针头进行检测,针头弯曲变形或安装过度倾斜或导致在药品抽吸过程中方向偏移,从而导致配药失败。目前,相关技术中主要依靠人工来检测针头是否正常,人的视觉容易疲劳,也容易造成误检,可见,相关技术中的针头检测效率较低。
3、针对相关技术中存在的针头检测效率较低的技术问题,目前尚未提出有效的解决方案。
技术实现思路
1、本技术提供了一种针头检测系统及方法,以至少解决相关技术中存在的针头检测效率较低的技术问题。
2、第一方面,本技术提供了一种针头检测系统,包括:注射器、机械臂、检测组件、处理器,其中,机械臂用于在接收到目标指令时从注射器区域拾取注射器,并将注射器移至检测组件内部的预设位置;检测组件用于照亮注射器的针头并进行拍摄,以得到目标图像,以及将目标图像传输给处理器;处理器用于对目标图像进行分析,以得到分析结果,分析结果用于表示注射器的针头是否存在异常,其中,在分析结果表示注射器的针头存在异常时,处理器还用于向机械臂发送第一指令,以指示机械臂将注射器移至第一区域,在分析结果表示注射器的针头不存在异常时,处理器还用于向机械臂发送第二指令,以指示机械臂将注射器移至第二区域。
3、通过采用上述技术方案,针头检测系统中包括注射器、机械臂、检测组件及处理器,机械臂在接收到目标指令时拾取注射器并将注射器移动至检测组件内部的预设位置,检测组件照亮注射器的针头并进行拍摄,得到目标图像,处理器对目标图像进行分析,得到分析结果,该分析结果表示注射器的针头是否存在异常,实现了由针头检测系统自动对注射器的针头进行检测的目的,避免了相关技术中主要依靠人工进行检测导致检测效率较低的问题;当分析结果表示注射器的针头存在异常时,处理器还向机械臂发送第一指令,以指示机械臂将注射器移动至第一区域,以及,当分析结果表示注射器的针头不存在异常时,处理器还向机械臂发送第二指令,以指示机械臂将注射器移动至第二区域,实现了将存在异常和不存在异常的针头分别移至不同区域的目的,进而可以对存在异常的针头进行相应处理的目的,实现了对注射器的针头进行有效管理的目的。
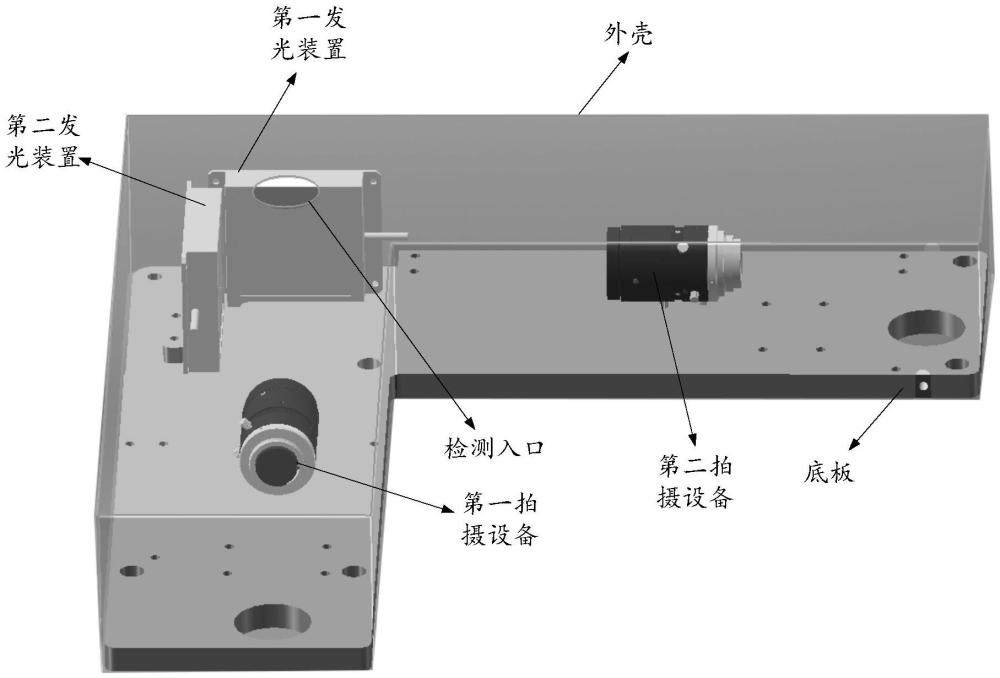
4、可选的,上述检测组件内部设置有:第一发光装置、第二发光装置、第一拍摄设备及第二拍摄设备,其中,第一发光装置用于发射第一光束,第二发光装置用于发射第二光束,其中,第一光束和第二光束垂直相交;第一拍摄设备用于从第一方向对注射器的针头进行拍摄得到第一图像,第二拍摄设备用于从第二方向对注射器的针头进行拍摄得到第二图像,其中,目标图像包括第一图像和第二图像,第一拍摄设备将第一图像发送给处理器,第二拍摄设备将第二图像发送给处理器,第一拍摄设备的镜头光轴与第一光束平行,第二拍摄设备的镜头光轴与第二光束平行。
5、通过采用上述技术方案,在检测组件内设置有:第一发光装置、第二发光装置、第一拍摄设备和第二拍摄设备,其中,第一发光装置、第二发光装置分别发出第一光束、第二光束,且第一光束和第二光束垂直相交,用于照亮注射器的针头,以便于第一拍摄设备、第二拍摄设备能够拍到包含针头的清晰图像,第一拍摄设备、第二拍摄设备分别从不同方向对注射器的针头进行拍摄,分别得到第一图像、第二图像。通过在检测组件内部从不同方向拍摄包含针头的图像,得到目标图像,即从多角度获取关于待检测注射器的针头的图像,以便于处理器根据目标图像分析针头是否存在异常。
6、可选的,第一光束、第二光束、第一拍摄设备的镜头光轴及第二拍摄设备的镜头光轴位于同一平面。
7、通过采用上述技术方案,第一光束、第二光束、第一拍摄设备的镜头光轴以及第二拍摄设备的镜头光轴位于同一平面,即第一光束、第二光束、第一拍摄设备的镜头光轴、第二拍摄设备的镜头光轴都是等高度的,且第一拍摄设备的镜头光轴与第二拍摄设备的镜头光轴也是相互垂直的,第一拍摄设备是正向面对第一发光装置的,第二拍摄设备是正向面对第二发光装置的,即从两个相差90º的方向分别对注射器的针头进行拍摄。
8、可选的,上述检测组件还包括:底板、外壳,其中,第一发光装置、第二发光装置均安装于底板上;第一拍摄设备安装于第一支撑件上,且第一支撑件与底板固定连接,第二拍摄设备安装于第二支撑件上,且第二支撑件与底板固定连接,第一拍摄设备与第二拍摄设备均位于底板上方预设高度的位置;外壳的顶部设有检测入口,其中,机械臂通过检测入口将注射器移至检测组件内部的预设位置,第一光束与第二光束的光束交点与检测入口的垂直中心线之间的距离小于或等于预设距离阈值。
9、通过采用上述技术方案,上述检测组件还包括底板和外壳,第一发光装置、第二发光装置均安装于底板上,使得第一光束和第二光束垂直相交,即第一光束和第二光束相对于底板是等高度的;第一拍摄设备和第二拍摄设备分别通过第一支撑件、第二支撑件固定于检测组件内部的底板上方预设高度处;机械臂可通过外壳顶部所设置的检测入口将注射器移至检测组件内部的预设位置,第一光束与第二光束的光束交点与检测入口的垂直中心线之前的距离小于或等于预设距离阈值,外壳顶部所开设的检测入口位于光束交点的正上方,以方便后续机械臂通过该检测入口将注射器的针头移至预设位置,也为了方便对针头进行拍摄。
10、可选的,上述检测组件还包括:传感器,其中,传感器用于检测注射器的位置数据,并将位置数据传输给处理器,处理器在基于位置数据确定注射器移至预设位置时向机械臂发送第三指令,以指示机械臂停止移动。
11、通过采用上述技术方案,上述检测组件中还可包括传感器,传感器用于检测注射器的位置数据并传输给处理器,当处理器根据注射器的位置数据确定注射器已经达到预设位置时向机械臂发送第三指令,以指示机械臂停止移动,即通过传感器的检测数据来控制机械臂何时停止移动,以实现控制注射器移动至预设位置的目的。
12、可选的,上述针头检测系统还包括:显示装置,其中,显示装置与处理器电性连接,处理器将分析结果发送给显示装置,以便于显示装置将分析结果进行显示。
13、通过采用上述技术方案,针头检测系统中还可包括显示装置,以用于显示分析结果,即显示对注射器的针头的检测结果,也即显示注射器的针头是否异常的结果,以方便检测人员直观地了解针头的情况。
14、在本技术的第二方面,还提供了一种针头检测方法,应用于上述任一项针头检测系统中,包括:机械臂在接收到目标指令的情况下,从注射器区域拾取注射器,并将注射器移至检测组件内部的预设位置;检测组件对注射器的针头进行拍摄,以得到目标图像,并将目标图像传输给处理器;处理器对目标图像进行分析,以得到分析结果,其中,分析结果用于表示注射器的针头是否存在异常;在分析结果表示注射器的针头存在异常时,处理器向机械臂发送第一指令,以指示机械臂将注射器移至第一区域;在分析结果表示注射器的针头不存在异常时,处理器向机械臂发送第二指令,以指示机械臂将注射器移至第二区域。
15、通过采用上述技术方案,机械臂在接收到目标指令时拾取注射器并将注射器移动至检测组件内部的预设位置,检测组件对注射器的针头进行拍摄,得到目标图像,处理器对目标图像进行分析,得到分析结果,该分析结果表示注射器的针头是否存在异常,实现了由针头检测系统自动对注射器的针头进行检测的目的,避免了相关技术中主要依靠人工进行检测导致检测效率较低的问题;当分析结果表示注射器的针头存在异常时,处理器还向机械臂发送第一指令,以指示机械臂将注射器移动至第一区域,以及,当分析结果表示注射器的针头不存在异常时,处理器还向机械臂发送第二指令,以指示机械臂将注射器移动至第二区域,实现了将存在异常和不存在异常的针头分别移至不同区域的目的,进而可以对存在异常的针头进行相应处理的目的,实现了对注射器的针头进行有效管理的目的。
16、可选的,检测组件对注射器的针头进行拍摄,以得到目标图像,包括:控制第一发光装置发射第一光束,以及控制第二发光装置发射第二光束,其中,所述第一光束和所述第二光束垂直相交;控制第一拍摄设备从第一方向对注射器的针头进行拍摄得到第一图像,以及控制第二拍摄设备从第二方向对注射器的针头进行拍摄得到第二图像,其中,目标图像包括第一图像和第二图像,检测组件内部设置有:第一发光装置、第二发光装置、第一拍摄设备及第二拍摄设备,第一拍摄设备的镜头光轴与第一光束平行,第二拍摄设备的镜头光轴与第二光束平行,且第一光束、第二光束、第一拍摄设备的镜头光轴及第二拍摄设备的镜头光轴位于同一平面。
17、通过采用上述技术方案,控制第一发光装置和第二发光装置分别发射第一光束和第二光束,其中,第一光束和第二光束垂直相交,另外,控制第一拍摄设备、第二拍摄设备分别从不同方向对注射器的针头进行拍摄,分别得到第一图像、第二图像,第一光束、第二光束用于照亮注射器的针头,以便于第一拍摄设备、第二拍摄设备能够拍到包含针头的清晰图像,通过在检测组件内部从不同方向拍摄包含针头的图像,得到目标图像,即从多角度获取关于待检测注射器的针头的图像,以便于处理器根据目标图像分析针头是否存在异常。
18、可选的,处理器对目标图像进行分析,以得到分析结果,包括:处理器基于目标图像确定针头位置与光束交点位置的偏差值,其中,光束交点位置是第一光束与第二光束相交的位置;当偏差值不在预设误差范围内的情况下,处理器得到第一结果,当偏差值在预设误差范围内的情况下,处理器得到第二结果,其中,分析结果包括第一结果和第二结果,第一结果表示注射器的针头存在异常,第二结果表示注射器的针头不存在异常。
19、通过采用上述技术方案,处理器根据目标图像确定针头位置与光束交点位置的偏差值,当偏差值不在预设误差范围内时,得到第一结果,第一结果表示注射器的针头存在异常,当偏差值在预设误差范围内时,得到第二结果,第二结果表示注射器的针头不存在异常。通过本技术方案,实现了根据目标图像确定注射器的针头是否存在异常的目的。
20、可选的,将注射器移至检测组件内部的预设位置,包括:机械臂控制注射器向下移动,直至接收到第三指令时停止移动,其中,第三指令是处理器在基于位置数据确定注射器移至预设位置时向机械臂发送的,位置数据是由传感器对注射器的位置进行检测所得到并发送给处理器的,检测组件中还包括传感器。
21、通过采用上述技术方案,处理器接收传感器所检测的注射器的位置数据,当确定注射器移至预设位置时向机械臂发送第三指令,机械臂接收到第三指令时停止移动,即通过传感器的检测数据来控制机械臂何时停止移动,以实现控制注射器移动至预设位置的目的。
22、在本技术的第三方面,还提供了一种电子设备,包括存储器和处理器,存储器上存储有计算机程序,处理器执行程序时实现上述任一项的方法步骤。
23、在本技术的第四方面,还提供了一种计算机可读存储介质,计算机可读存储介质存储有指令,当指令被执行时,执行上述任一项的方法步骤。
24、综上所述,本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
25、1、实现了由针头检测系统自动对注射器的针头进行检测的目的,避免了相关技术中主要依靠人工进行检测导致检测效率较低的问题。
26、2、实现了根据目标图像确定注射器的针头是否存在异常的目的。
27、3、实现了将存在异常和不存在异常的针头分别移至不同区域的目的,进而可以对存在异常的针头进行相应处理的目的,实现了对注射器的针头进行有效管理的目的。
- 还没有人留言评论。精彩留言会获得点赞!