水下引导定位方法、水下引导定位系统和计算装置与流程
本发明涉及利用短基线、超短基线等技术进行定位的水下定位系统,特别涉及一种水下引导定位方法、水下引导定位系统和计算装置。
背景技术:
1、在水下应急救援领域,经常需要对水下目标进行定位,其中“引导搜救”是一项迫切需求,即通过水下定位设备对水下目标进行定位,并引导水下救援人员搜索目标。由于gps信号在水下无法使用,因此水下定位通常采用声学定位的方法,通常包括超短基线、短基线以及长基线。在水下应急救援领域,比较常见的定位方法是短基线定位以及超短基线定位。目前高精度短基线和超短基线定位设备成本较高,且较为笨重。低精度短基线和超短基线定位设备又难以满足“引导搜救”任务需求。例如,市场上价格适中的超短基线定位设备,其实测定位精度通常不高于2%,而在实际搜救任务中,定位设备与被定位目标之间的距离通常超过数百米,当距离为300m时,目标定位误差将达到6m,搜救人员和被搜救目标之间的相对距离定位则可能达到12m,而通常水下可视距离不超过2至3米,当搜救人员距离目标较近时,每次定位得到的目标方位通常会因为较大的定位误差出现明显跳动,使搜救人员无法找到目标。
2、图1显示了典型的水下引导工况,图中矩形代表搜寻人员,三角形代表被搜寻目标,实线代表第一次定位结果,虚线代表第二次定位结果。当定位设备距离目标较远时,定位设备本身的误差效应会被放大。第一次定位时,目标在下方,第二次定位时,由于定位误差的影响,目标出现在上方。尤其定位出的搜寻人员与目标之间的距离剧烈变动,导致搜寻人员难以合理判断搜寻方向。
技术实现思路
1、本发明的一个目的在于提供一种水下引导定位方法、水下引导定位系统和计算装置,其中所述水下引导定位方法能够对第一通信设备的位置和第二通信设备的位置进行准确定位,以引导所述第一通信设备至所述第二通信设备所在位置。
2、本发明的一个目的在于提供一种水下引导定位方法、水下引导定位系统和计算装置,其中所述水下引导方法结合成熟的短基线定位、超短基线定位等定位技术,通过询问-应答的方式获取定位设备和所述第一通信设备的相对距离信息、所述定位设备和所述第二通信设备的相对距离信息、所述第一通信设备和所述第二通信设备的相对距离信息、所述第一通信设备和所述第二通信设备的深度信息,进而可准确地确定多个被定位点之间的相对位置关系。
3、本发明的一个目的在于提供一种水下引导定位方法、水下引导定位系统和计算装置,其中定位设备发出广播询问信息,所述第一通信设备和所述第二通信设备可以接收广播询问信息,这样,所述水下引导定位方法可以避免所述定位设备对所述第一通信设备和所述第二通信设备依次询问造成的时间浪费,提高定位效率。
4、本发明的一个目的在于提供一种水下引导定位方法、水下引导定位系统和计算装置,其中在所述定位设备发出广播询问信息的过程中传递时间信息,利用测距精度容易保证的特性,在定位过程中即获取了所述定位设备和所述第一通信设备、所述定位设备和所述第二通信设备、所述第一通信设备和所述第二通信设备的相对距离信息,以提高定位效率和定位精度。
5、本发明的一个目的在于提供一种水下引导定位方法、水下引导定位系统和计算装置,其中在所述第一通信设备和所述第二通信设备进行应答时,应答信号中包含了所述第一通信设备和所述第二通信设备的深度信息,结合所述定位设备、所述第一通信设备和所述第二通信设备的相对距离信息,可以得到所述定位设备、所述第一通信设备和所述第二通信设备的位置约束关系,以提高定位效率和定位精度。
6、本发明的一个目的在于提供一种水下引导定位方法、水下引导定位系统和计算装置,其中定位过程中提供可靠的距离信息,避免定位误差造成距离跳动影响作业人员的判断,极大的提高了引导作业的可靠性。
7、依本发明的一个方面,本发明提供了水下引导定位方法,其中所述水下引导定位方法包括如下步骤:
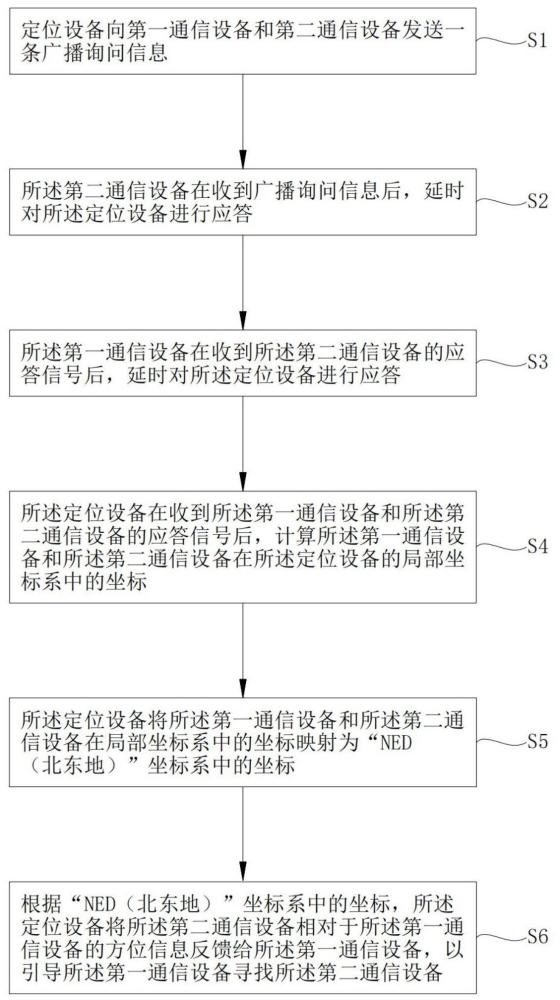
8、s1,定位设备向第一通信设备和第二通信设备发送一条广播询问信息;
9、s2,所述第二通信设备在收到广播询问信息后,延时对所述定位设备进行应答;
10、s3,所述第一通信设备在收到所述第二通信设备的应答信号后,延时对所述定位设备进行应答;
11、s4,所述定位设备在收到所述第一通信设备和所述第二通信设备的应答信号后,计算所述第一通信设备和所述第二通信设备在所述定位设备的局部坐标系中的坐标;
12、s5,所述定位设备将所述第一通信设备和所述第二通信设备在局部坐标系中的坐标映射为“ned(北东地)”坐标系中的坐标;
13、s6,根据“ned(北东地)”坐标系中的坐标,所述定位设备将所述第二通信设备相对于所述第一通信设备的方位信息反馈给所述第一通信设备,以引导所述第一通信设备寻找所述第二通信设备;
14、在所述步骤s4中,根据所述第一通信设备和所述第二通信设备在所述定位设备的局部坐标系中的方位角和、所述第一通信设备和所述定位设备的距离、所述第二通信设备和所述定位设备的距离、所述第一通信设备和所述第二通信设备的距离、所述第一通信设备的深度信息以及所述第二通信设备的深度信息,计算所述第一通信设备和所述第二通信设备在所述定位设备的局部坐标系中的坐标、;
15、所述定位设备根据自身广播询问信号发出时刻、水中声速、所述第一通信设备的延时应答时间、所述第二通信设备的延时应答时间和时间差,计算所述定位设备和所述第一通信设备的距离、所述定位设备和所述第二通信设备的距离以及所述第一通信设备和所述第二通信设备的距离的计算过程为:
16、(1)
17、(2)
18、(3)
19、结合式(1)、(2)、(3)可得:
20、(4),
21、其中参数为所述第一通信设备的应答信号的抵达时刻,参数为所述第二通信设备的应答信号的抵达时刻;
22、计算所述第一通信设备在所述定位设备的局部坐标系中的坐标的公式为:
23、
24、其中为在平面投影与轴的夹角,为与平面的夹角,参数为所述定位设备的深度信息;
25、所述第二通信设备在所述定位设备的局部坐标系中的坐标中的和满足以下约束条件:
26、;
27、通过公式计算得出。
28、根据本发明的一个实施例,在所述步骤s1中,定位设备选自:短基线设备、超短基线设备以及长基线设备中的一种或是至少两种的组合。
29、根据本发明的一个实施例,在所述步骤s1中,关于所述广播询问信息的通信信号依次由同步信号段、通信header段以及通信数据段组成;
30、在所述步骤s2中,所述第二通信设备在广播询问时刻的基础上,延时对所述定位设备进行应答,应答信号中附加所述第二通信设备的深度信息;
31、在所述步骤s3中,所述第一通信设备在收到所述第二通信设备的应答信号后,在应答信号的抵达时刻的基础上,延时对所述定位设备进行应答,应答信号中附加所述第一通信设备的深度信息;
32、在所述步骤s5中,所述定位设备通过自身姿态输出的姿态信息,将坐标、映射为“ned(北东地)”坐标系中的坐标、;
33、在所述步骤s6中,所述定位设备根据坐标、,将所述第二通信设备相对于所述第一通信设备的方位信息反馈给所述第一通信设备,以引导所述第一通信设备寻找所述第二通信设备。
34、根据本发明的一个实施例,在所述步骤s4之前,所述水下引导定位方法进一步包括步骤:
35、所述定位设备在收到应答信号后,记录所述第一通信设备的应答信号的抵达时刻,并提取从广播询问时刻到所述第一通信设备收到所述第二通信设备的应答信号的抵达时刻的时间差和所述第一通信设备的深度信息,记录所述第二通信设备的应答信号的抵达时刻并提取所述第二通信设备的深度信息;
36、所述定位设备在提取所述第一通信设备和所述第二通信设备的应答信号的同步信号段后,根据接收基阵通道的相位差信息,分别计算所述第一通信设备和所述第二通信设备在所述定位设备的局部坐标系中的方位角;
37、所述定位设备根据所述第一通信设备和所述第二通信设备的应答时间和时间差,计算所述定位设备和所述第一通信设备的距离、所述定位设备和所述第二通信设备的距离以及所述第一通信设备和所述第二通信设备的距离。
38、根据本发明的一个实施例,所述第一通信设备延时对所述定位设备进行应答的延时时间和所述第二通信设备延时对所述定位设备进行应答的延时时间相同。
39、根据本发明的一个实施例,所述第一通信设备延时对所述定位设备进行应答的延时时间和所述第二通信设备延时对所述定位设备进行应答的延时时间是300ms。
40、依本发明的另一个方面,本发明进一步提供一种水下引导定位系统,其包括定位设备、第一通信设备以及第二通信设备;
41、所述定位设备向所述第一通信设备和所述第二通信设备发送一条广播询问信息;
42、所述第二通信设备在收到广播询问信息后,延时对所述定位设备进行应答;
43、所述第一通信设备在收到所述第二通信设备的应答信号后,延时对所述定位设备进行应答;
44、所述定位设备在收到所述第一通信设备和所述第二通信设备的应答信号后,计算所述第一通信设备和所述第二通信设备在所述定位设备的局部坐标系中的坐标;
45、所述定位设备将所述第一通信设备和所述第二通信设备在局部坐标系中的坐标映射为“ned(北东地)”坐标系中的坐标;
46、根据“ned(北东地)”坐标系中的坐标,所述定位设备将所述第二通信设备相对于所述第一通信设备的方位信息反馈给所述第一通信设备,以引导所述第一通信设备寻找所述第二通信设备;
47、根据所述第一通信设备和所述第二通信设备在所述定位设备的局部坐标系中的方位角和、所述第一通信设备和所述定位设备的距离、所述第二通信设备和所述定位设备的距离、所述第一通信设备和所述第二通信设备的距离、所述第一通信设备的深度信息以及所述第二通信设备的深度信息,计算所述第一通信设备和所述第二通信设备在所述定位设备的局部坐标系中的坐标、;
48、所述定位设备根据自身广播询问信号发出时刻、水中声速、所述第一通信设备的延时应答时间和所述第二通信设备的延时应答时间和时间差,计算所述定位设备和所述第一通信设备的距离、所述定位设备和所述第二通信设备的距离以及所述第一通信设备和所述第二通信设备的距离的计算过程为:
49、(1)
50、(2)
51、(3)
52、结合式(1)、(2)、(3)可得:
53、(4),
54、其中参数为所述第一通信设备的应答信号的抵达时刻,参数为所述第二通信设备的应答信号的抵达时刻;
55、计算所述第一通信设备在所述定位设备的局部坐标系中的坐标的公式为:
56、
57、其中为在平面投影与轴的夹角,为与平面的夹角,参数为所述定位设备的深度信息;
58、所述第二通信设备在所述定位设备的局部坐标系中的坐标中的和满足以下约束条件:
59、;
60、通过公式计算得出。
61、根据本发明的一个实施例,所述定位设备发送的广播询问信息的通信信号依次由同步信号段、通信header段以及通信数据段组成;
62、所述第二通信设备在广播询问时刻的基础上,延时对所述定位设备进行应答,应答信号中附加所述第二通信设备的深度信息;
63、所述第一通信设备在收到所述第二通信设备的应答信号后,在应答信号的抵达时刻的基础上,延时对所述定位设备进行应答,应答信号中附加所述第一通信设备的深度信息;
64、根据所述第一通信设备和所述第二通信设备在所述定位设备的局部坐标系中的方位角、所述第一通信设备和所述定位设备的距离、所述第二通信设备和所述定位设备的距离、所述第一通信设备和所述第二通信设备的距离、所述第一通信设备的深度信息以及所述第二通信设备的深度信息,计算所述第一通信设备和所述第二通信设备在所述定位设备的局部坐标系中的坐标、;
65、所述定位设备通过自身姿态输出的姿态信息,将坐标、映射为“ned(北东地)”坐标系中的坐标、;
66、所述定位设备根据坐标、,将所述第二通信设备相对于所述第一通信设备的方位信息反馈给所述第一通信设备,以引导所述第一通信设备寻找所述第二通信设备。
67、根据本发明的一个实施例,在计算所述第一通信设备和所述第二通信设备在所述定位设备的局部坐标系中的坐标、之前且在所述定位设备在收到应答信号后,记录所述第一通信设备的应答信号的抵达时刻,并提取从广播询问时刻到所述第一通信设备收到所述第二通信设备的应答信号的抵达时刻的时间差和所述第一通信设备的深度信息,记录所述第二通信设备的应答信号的抵达时刻并提取所述第二通信设备的深度信息;
68、所述定位设备在提取所述第一通信设备和所述第二通信设备的应答信号的同步信号段后,根据接收基阵通道的相位差信息,分别计算所述第一通信设备和所述第二通信设备在所述定位设备的局部坐标系中的方位角;
69、所述定位设备根据所述第一通信设备和所述第二通信设备的应答时间和时间差,计算所述定位设备和所述第一通信设备的距离、所述定位设备和所述第二通信设备的距离以及所述第一通信设备和所述第二通信设备的距离。
70、依本发明的另一个方面,本发明进一步提供一种计算装置,其包括存储器和处理器,其中,所述存储器用于存储计算机程序;所述处理器用于调用所述存储器中的计算机程序,以使得所述计算装置执行水下引导定位方法,其中所述水下引导定位方法包括如下步骤:
71、s1,定位设备向第一通信设备和第二通信设备发送一条广播询问信息;
72、s2,所述第二通信设备在收到广播询问信息后,延时对所述定位设备进行应答;
73、s3,所述第一通信设备在收到所述第二通信设备的应答信号后,延时对所述定位设备进行应答;
74、s4,所述定位设备在收到所述第一通信设备和所述第二通信设备的应答信号后,计算所述第一通信设备和所述第二通信设备在所述定位设备的局部坐标系中的坐标;
75、s5,所述定位设备将所述第一通信设备和所述第二通信设备在局部坐标系中的坐标映射为“ned(北东地)”坐标系中的坐标;
76、s6,根据“ned(北东地)”坐标系中的坐标,所述定位设备将所述第二通信设备相对于所述第一通信设备的方位信息反馈给所述第一通信设备,以引导所述第一通信设备寻找所述第二通信设备。
77、与现有技术相比,本发明具有至少以下有益效果:
78、第1,所述定位设备发出广播询问信息,所述第一通信设备和所述第二通信设备可以接收广播询问信息,这样,所述水下引导定位方法可以避免所述定位设备对所述第一通信设备和所述第二通信设备依次询问造成的时间浪费,提高定位效率;
79、第2,所述第二通信设备在收到广播询问信息后,延时对所述定位设备进行应答,所述第一通信设备在收到所述第二通信设备的应答信号后,延时对所述定位设备进行应答,通过这样的方式,所述水下引导定位方法为信号接收、发射电路充电等预留充足时间,以避免数据丢包;
80、第3,所述水下引导定位方法在所述定位设备发出广播询问信息的过程中传递时间信息,利用测距精度容易保证的特性,在定位过程中即获取了所述定位设备和所述第一通信设备、所述定位设备和所述第二通信设备、所述第一通信设备和所述第二通信设备的相对距离信息,以提高定位效率和定位精度;
81、第4,在所述第一通信设备和所述第二通信设备进行应答时,应答信号中包含了所述第一通信设备和所述第二通信设备的深度信息,结合所述定位设备、所述第一通信设备和所述第二通信设备的相对距离信息,可以得到所述定位设备、所述第一通信设备和所述第二通信设备的位置约束关系,以提高定位效率和定位精度;
82、第5,所述水下引导定位方法在定位过程中提供可靠的距离信息,避免定位误差造成距离跳动影响作业人员的判断,极大的提高了引导作业的可靠性。
83、本发明的其他有益效果将在接下来的描述中进一步说明。
- 还没有人留言评论。精彩留言会获得点赞!