基于单色光的单相饱和度分布测量方法以及测量装置
本发明涉及污染环境学,具体涉及一种基于单色光的单相饱和度分布测量方法以及测量装置。
背景技术:
1、工业集聚区土壤-地下水系统中广泛存在苯系物、氯代烃、石油烃等典型非水相(non-aqueous phase liquid,napl)污染物,该类污染物一经泄漏,其在包气带中的运移过程是非水相、水相、气相的多相流运移过程。在多相流主导下的污染物迁移转化过程中,k(相对渗透率)-s(饱和度)-p(相压强)的本构方程主导着各个相态、尤其是有机污染物的多维度运移及其时空分布规律,而有机污染物的饱和度是刻画该过程的核心指标。如今,一般是采用单色光测定技术等测定非水相有机污染物饱和度分布,但仅能运用于饱水带场景,且待测的变量繁多,导致不能便捷地量化所有位置的非水相有机污染物饱和度的分布。
技术实现思路
1、本发明的主要目的是提出一种能够测定非饱和带非水相有机污染物饱和度分布的基于单色光的单相饱和度分布测量方法以及测量装置。
2、为实现上述目的,本发明提出的一种基于单色光的单相饱和度分布测量方法,包括以下步骤:
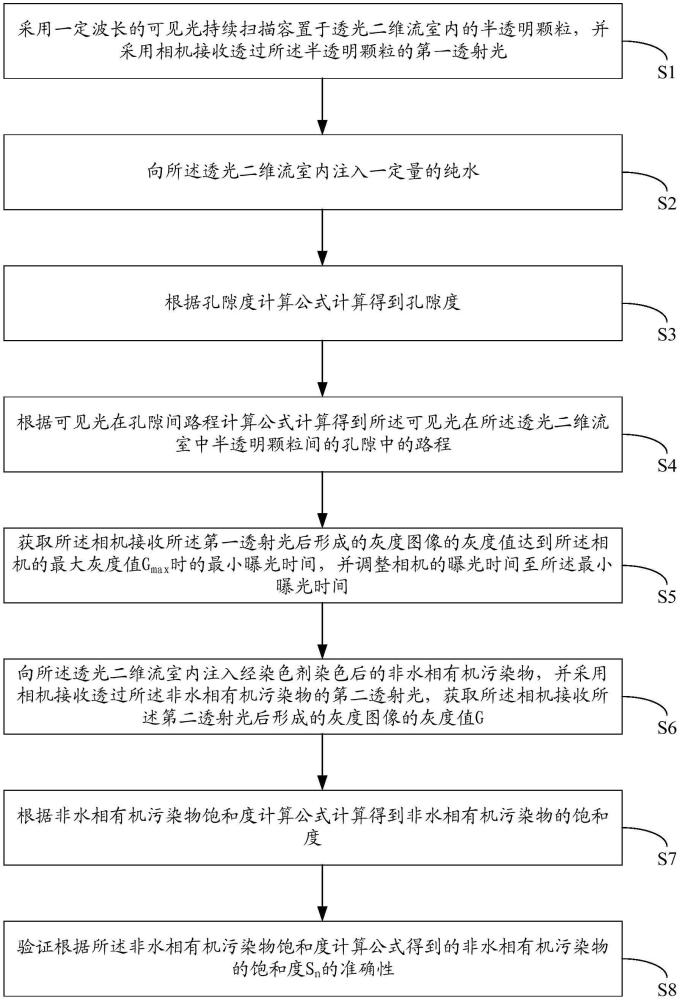
3、步骤s1、采用一定波长的可见光持续扫描容置于透光二维流室内的半透明颗粒,并采用相机接收透过所述半透明颗粒的第一透射光;
4、步骤s2、向所述透光二维流室内注入一定量的纯水;
5、步骤s5、获取所述相机接收所述第一透射光后形成的灰度图像的灰度值达到所述相机的最大灰度值gmax时的最小曝光时间,并调整相机的曝光时间至所述最小曝光时间;
6、步骤s6、向所述透光二维流室内注入经染色剂染色后的非水相有机污染物,并采用相机接收透过所述非水相有机污染物的第二透射光,获取所述相机接收所述第二透射光后形成的灰度图像的灰度值g;
7、步骤s7、根据非水相有机污染物饱和度计算公式计算得到非水相有机污染物的饱和度,所述非水相有机污染物饱和度计算公式为式中,sn为所述非水相有机污染物的饱和度,αn为所述非水相有机污染物单位长度的光吸收系数,dp为所述可见光在所述透光二维流室中半透明颗粒间的孔隙中的路程。
8、进一步地,所述步骤s2、向所述透光二维流室内注入一定量的纯水之后、以及所述步骤s7根据非水相有机污染物饱和度计算公式计算得到非水相有机污染物的饱和度,所述非水相有机污染物饱和度计算公式为之前还包括:
9、步骤s3、根据孔隙度计算公式计算得到孔隙度,所述孔隙度计算公式为式中,n为孔隙度,vfcw为所述透光二维流室中纯水的净进水量,d为所述透光二维流室的厚度,lfc为所述透光二维流室的长度,h为所述透光二维流室内纯水的水位高度;
10、步骤s4、根据可见光在孔隙间路程计算公式计算得到所述可见光在所述透光二维流室中半透明颗粒间的孔隙中的路程dp,所述总孔径厚度计算公式为dp=c2nd。
11、进一步地,在所述步骤s7、根据非水相有机污染物饱和度计算公式计算得到非水相有机污染物的饱和度,所述非水相有机污染物饱和度计算公式为之后还包括:
12、步骤s8、验证根据所述非水相有机污染物饱和度计算公式得到的非水相有机污染物的饱和度sn的准确性。
13、进一步地,所述步骤s8、验证根据所述非水相有机污染物饱和度计算公式得到的非水相有机污染物的饱和度sn的准确性具体包括:
14、步骤s81、采用质量平衡法验证根据所述非水相有机污染物饱和度计算公式得到的非水相有机污染物的饱和度sn的准确性;
15、步骤s82、采用多点采样干馏法验证根据所述非水相有机污染物饱和度计算公式得到的非水相有机污染物的饱和度sn的准确性。
16、进一步地,所述步骤s81、采用质量平衡法验证根据所述非水相有机污染物饱和度计算公式得到的非水相有机污染物的饱和度sn的准确性具体包括:
17、步骤s811、获取某一时刻所述透光二维流室内所述非水相有机污染物的实际注入量v0;
18、步骤s812、基于所述步骤7中获取的在该时刻所述相机接收所述第二透射光后形成的灰度图像,并根据非水相总体积计算公式,计算得到该时刻所述透光二维流室内非水相有机污染物的总体积,所述非水相总体积计算公式为式中,vn为某一时刻所述透光二维流室内非水相有机污染物的总体积,x1为所述灰度图像中像素点数量之和,为所述灰度图像中每个像素点在该时刻的非水相有机污染物饱和度,a1为单个像素点的面积,d为所述透光二维流室的厚度,n为孔隙度;
19、步骤s813、计算v0与vn的差值δv;
20、步骤s814、若则根据所述非水相有机污染物饱和度计算公式得到的非水相有机污染物的饱和度sn准确,若则根据所述非水相有机污染物饱和度计算公式得到的非水相有机污染物的饱和度sn有误。
21、进一步地,所述步骤s82、采用多点采样干馏法验证根据所述非水相有机污染物饱和度计算公式得到的非水相有机污染物的饱和度sn的准确性具体包括:
22、步骤s821、在某一时刻拆开所述透光二维流室,并对所述透光二维流室中半透明颗粒、纯水和非水相有机污染物混合形成的混合物进行区间划分,形成多个第一子单元;
23、步骤s822、将某一第一子单元作为第一目标子单元,并将所述第一目标子单元的混合物送至干馏仪测量,得到所述第一目标子单元中非水相有机污染物的总体积v0′;
24、步骤s823、将所述步骤7中获取的在该时刻所述相机接收所述第二透射光后形成的灰度图像,对应所述混合物的区间划分形成多个第二子单元,并将所述灰度图像中与所述第一目标子单元相对应的第二子单元作为第二目标子单元;
25、步骤s824、根据非水相子单元体积计算公式,计算得到该时刻所述第二目标子单元内非水相有机污染物的总体积vn′,所述非水相子单元体积计算公式为式中,x2为所述第二目标子单元中像素点数量之和,为基于所述灰度图像得到所述第二目标子单元的非水相有机污染物饱和度,a2为所述灰度图像中单个像素点的面积,d为所述透光二维流室的厚度,n为孔隙度;
26、步骤s825、计算v0′与vn′的差值δv′;
27、步骤s826、若则根据所述非水相有机污染物饱和度计算公式得到的非水相有机污染物的饱和度sn准确,若则根据所述非水相有机污染物饱和度计算公式得到的非水相有机污染物的饱和度sn有误。
28、进一步地,所述可见光的波长为520nm;
29、所述染色剂包括有机染色剂苏丹ⅳ。
30、进一步地,采用二分法获取所述相机接收所述第一透射光后形成的灰度图像的灰度值达到所述相机的最大灰度值gmax时的最小曝光时间。
31、本发明还提供一种测量装置,适用于上述基于单色光的单相饱和度分布测量方法进行测量,所述非水相有机污染物饱和度分布测量装置包括:
32、实验箱,其内设有一透光二维流室,所述透光二维流室用于放置半透明颗粒,且开设有至少一注水孔和一注油孔,以通过所述注水孔注入纯水、以及通过所述注油孔注入染色后非水相有机污染物;
33、光源,间隔地设于所述透光二维流室在厚度方向上的一侧,用于发射一定波长的可见光持续扫描所述透光二维流室;以及,
34、相机,间隔地设于所述透光二维流室在厚度方向上的另一侧,用于接收透过所述透光二维流室的透射光,并生成灰度图像。
35、进一步地,所述实验箱包括:
36、内框架;以及,
37、两个玻璃板,可拆卸地密封于所述内框架在宽度方向上的两侧,以与所述内框架围合形成一实验区,所述实验区至少分为一所述透光二维流室和一水室,所述水室用于容置所述纯水,且与所述注水孔连通。
38、本发明的技术方案中,利用所述染色剂对单色光即一定波长的可见光的强吸收性,使得所述相机仅捕捉单相即非水相部分的光透信息,即仅能接收所述可见光透过所述非水相有机污染物的第二透射光形成灰度图像,不受其它相态及界面光能损失的干扰,在室内实验的尺度上也能测定非饱和带非水相有机污染物饱和度分布;再通过所述非水相有机污染物饱和度计算公式计算饱和度,以此定量刻画非水相运移规律,且待测变量少,可以便捷地量化透光二维流室内所有位置的非水相有机污染物饱和度的分布。
- 还没有人留言评论。精彩留言会获得点赞!