一种索杆铰接式伸展臂斜拉索组件张紧力测试方法
本发明属于空间结构无损检测,尤其是涉及一种索杆铰接式伸展臂斜拉索组件张紧力测试方法。
背景技术:
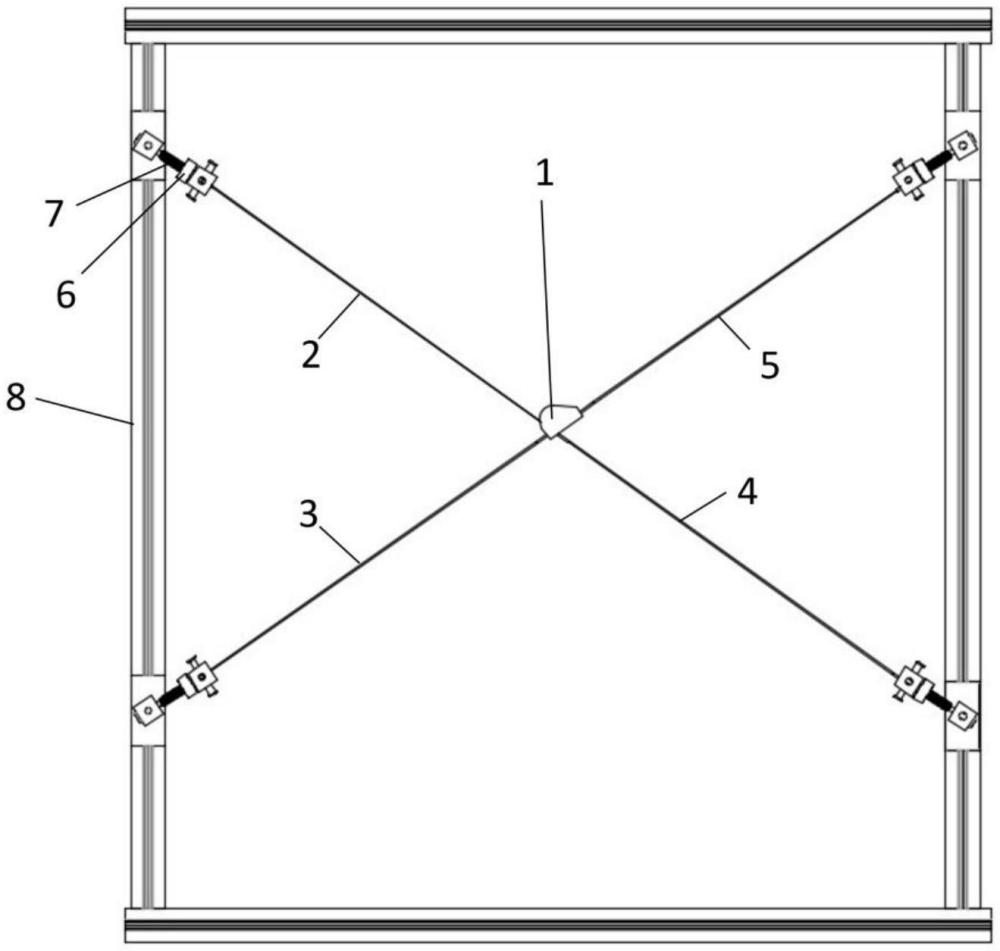
1、近年来,随着对地遥感、空间站建设以及深空探测领域的发展,索杆铰接式空间伸展臂以其大收纳比、高比刚度、高可靠性等优势,被广泛用作大型可展开结构的支撑构架。斜拉索组件是索杆铰接式伸展臂的核心部件,主要作用是在展开后通过锁定实现伸展臂的构型保持,通过自身的预紧力消除关节的间隙,以及通过自身的抗拉特性为伸展臂提供刚度。斜拉索组件的张力分布对伸展臂结构的稳定性和形状控制至关重要,绳索的张力直接影响结构的刚度、变形、载荷分配以及动力学特性,进而影响末端载荷的性能发挥。
2、在地面进行绳索张力测试过程中,传统的手持式索力计在测量此类结构时容易对绳索造成损伤,并且还存在着测试效率低、精度差的问题。基于频率法的索力测试具有非接触、无损伤、精度高的优点,基于频率法进行斜拉索组件的张紧力测量过程中存在以下难题,主要包括:一是斜拉索组件是四根绳索并联并具有中心质量的结构,其动力学建模以及四根绳索与其对应的索力换算关系是第一难题;二是斜拉索组件属于轻质柔性结构,其多阶频率的准确、快速获取是第二难题。致使现在缺乏针对此类结构的有效的索力测试方法。
技术实现思路
1、有鉴于此,本发明旨在提出一种索杆铰接式伸展臂斜拉索组件张紧力测试方法,以至少解决背景技术中的至少一个问题。
2、为达到上述目的,本发明的技术方案是这样实现的:
3、一种索杆铰接式伸展臂斜拉索组件张紧力测试方法,包括:
4、测量被测的斜拉索组件的基本结构参数;
5、获取斜拉索组件的振动信号;
6、根据获取的振动信号,对获取的振动信号进行谱分析;
7、在频谱图中选择需要的四阶频率;
8、依据索力与频率关系,换算得出四根绳索的张力值。
9、进一步的,所需测量的斜拉索组件的基本结构参数包括:
10、绳索的长度和等效刚度、中心锁定装置的质量以及绕质心的转动惯量矩阵、以绳索交叉点为原点的四根绳索的两个端点的坐标。
11、其中,绳索刚度通过静力拉伸试验获得,转动惯量通过转动惯量测点仪测量或通过在三维绘图软件中计算获得。
12、进一步的,所述获取斜拉索组件的振动信号,包括:
13、方法中的振动信号获取方式为非接触式激励与振动信号测量方法,具体操作为:
14、获取斜拉索组件的振动信号时,选择激光测振仪或激光位移传感器等非接触传感器进行振动信号测量,避免传统的接触式连接的加速度传感器对结构引入附加质量影响。振动的激励的方式包括敲击激励和音箱激励,使用敲击激励时测量斜拉索组件自由衰减的振动信号;使用音箱激励时,通过音箱输出扫频的声音信号,扫频的频段覆盖结构的前6阶模态频率。声音激励可以避免传统的接触式激励方式引入的附加质量和附加刚度影响。其中,传感器的测量位置在斜拉索组件的锁定装置上,具体的测量位置根据有限元仿真的仿真结果确定,用以保证前六阶的模态振型在该点存在较大的运动投影。具体方法为,在有限元模型中对结构进行谐响应分析,选择结构上的点进行谱分析,选择频谱图中各阶频幅值最大的点作为测点。
15、进一步的,所述获取的振动信号进行谱分析,包括:
16、截掉敲击时刻附近的响应信号,选取其自由衰减部分,进行fft变换,结合确定的斜拉索组件的工作张紧力范围,在频谱中选取前六阶模态频率。使用音箱激励时,采用短时傅里叶变换进行频率提取,相比传统的频域分析具有更好的信号识别效果,并可以有效剔除干扰信号。
17、进一步的,所述在频谱图中选择需要的四阶频率,包括:
18、识别出结构的四根绳索张紧力就需要结构的至少四阶频率,这里频率选择的原则为:优先选择结构的前四阶面外方向的模态频率,因为面外方向的振动最容易激励和测量。
19、进一步的,所述依据索力与频率关系,换算得出四根绳索的张力值,包括:
20、频率与索力关系的推算步骤:
21、对四根绳索进行编号,并对伸展臂的全部斜拉索组件遵循相同的命名规则,然后以斜拉索组件的中心位置为原点o建立全局静坐标系o-xyz,在锁定装置的质心位置p建立动坐标系p-xyz,定义绳索与质量块的连接点为bi,绳索与固定边界的连接点为ai,四根绳索的张力分别为ti。
22、进一步的,定义锁定装置的位姿为:
23、
24、其中,p=[x y z]t为中心锁定装置在全局坐标系o-xyz下的位置矢量,为局部坐标系p-xyz下的欧拉角姿态矢量,ip为锁定装置在动坐标系p-xyz下的转动惯量矩阵,op为由静坐标系原点o指向动坐标系原点p的向量,ui为第i根绳索的单位矢量,其表达式为:
25、
26、斜拉索组件初始状态下的力和力矩平衡条件为:
27、
28、不同的向量间具有如下关系:
29、
30、位置变化后,绳索连接点bi坐标变为:
31、
32、式中,为坐标系p-xyz到o-xyz的旋转矩阵;
33、
34、任意点四根绳索的张紧力表达式为:
35、ti=k(obi'-oai)+t0i (6)
36、式中,k为绳索的等效刚度,t0i为第i根绳索的初始张力;
37、根据刚体绕定点转动原理,可知斜拉索组件绕原点o的转动角速度为:
38、
39、中心锁定装置相对坐标原点o的转动惯量为:
40、io=htiph (8)
41、根据牛顿-欧拉法得到系统的动力学方程为:
42、
43、式中,为动力学方程质量相关项,其中e为3×3单位矩阵;为动力学方程速度相关项,g=[0-mg 0 0 0 0]t为重力项,表示斜拉索组件的重力大小和方向;其只与结构的尺寸参数有关,er为外部的激励;
44、假设中心锁定装置受到微小力df的作用下产生微小位移dx,则系统的刚度矩阵可表示为:
45、
46、系统的固有频率表示为:
47、
48、通过matlab计算不同张力组合t1,t2,t3,t4下斜拉索组件的各阶固有频率,然后以用基函数1,ti,为(i=1,2,3,4)基函数,基于多元非线性回归拟合t1,t2,t3,t4与选择的四阶固有频率f1,fi,fj,fk,得到斜拉索组件的振动频率与索力的经验表达式。
49、进一步的,本方案公开了一种电子设备,包括处理器以及与处理器通信连接,且用于存储所述处理器可执行指令的存储器,所述处理器用于执行一种索杆铰接式伸展臂斜拉索组件张紧力测试方法。
50、进一步的,本方案公开了一种服务器,包括至少一个处理器,以及与所述处理器通信连接的存储器,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述处理器执行,以使所述至少一个处理器执行一种索杆铰接式伸展臂斜拉索组件张紧力测试方法。
51、进一步的,本方案公开了一种计算机可读取存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现一种索杆铰接式伸展臂斜拉索组件张紧力测试方法。
52、相对于现有技术,本发明所述的一种索杆铰接式伸展臂斜拉索组件张紧力测试方法具有以下有益效果:
53、本发明所述的一种索杆铰接式伸展臂斜拉索组件张紧力测试方法,适用索杆铰接式空间伸展臂各种型号的斜拉索组件的索力测量场合,并且可以推广至任何此类构型的其他工程结构之中,对提高此类空间可展开结构的绳索组件张紧力检测效率和精度具有重要意义。
- 还没有人留言评论。精彩留言会获得点赞!