一种基于局部邻域地图的高精度图像导航定位方法与流程
本技术涉及导航定位,具体涉及一种基于局部邻域地图的高精度图像导航定位方法。
背景技术:
1、随着卫星导航定位技术的快速发展,对导航定位的精度要求越来越高,尤其是在工业、物流、军事等领域。卫星基于惯性传感器的导航定位技术是一种比较成熟的导航定位技术,具有不依赖外部环境的自主式导航功能,但是存在积累误差,并且随着时间的推移,积累误差越大,会对目标对象进行导航定位的精度产生影响。
2、为了提高对目标对象进行导航定位的精度,现有技术中采用gps导航与视觉相结合的方式来实现对目标对象的精准定位,由于城市环境的复杂性,存在大量被遮挡的建筑物以及干扰信号的影响,造成视觉图像不具有某些地理位置信息,或者卫星定位系统无法正常工作,此时采用gps导航与视觉相结合的方式,无法有效地提高对目标对象进行导航定位的精度,导致对目标对象进行导航定位的精度较差。
技术实现思路
1、为了解决上述技术问题,提供一种基于局部邻域地图的高精度图像导航定位方法,以解决现有的问题。
2、本技术解决技术问题的方案是提供一种基于局部邻域地图的高精度图像导航定位方法,包括以下步骤:
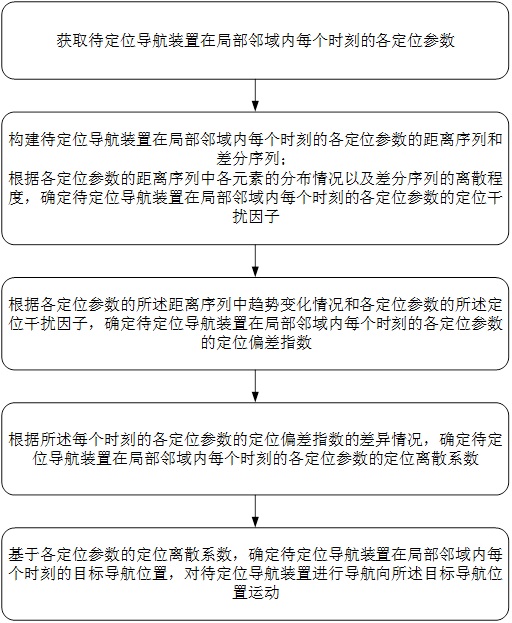
3、定位数据获取步骤,获取待定位导航装置在局部邻域内每个时刻的各定位参数;构建待定位导航装置在局部邻域内每个时刻的各定位参数的距离序列和差分序列;
4、定位干扰分析步骤,根据各定位参数的距离序列中各元素的分布情况以及差分序列的离散程度,确定待定位导航装置在局部邻域内每个时刻的各定位参数的定位干扰因子;
5、根据各定位参数的所述距离序列中趋势变化情况和各定位参数的所述定位干扰因子,确定待定位导航装置在局部邻域内每个时刻的各定位参数的定位偏差指数;
6、根据所述每个时刻的各定位参数的定位偏差指数的差异情况,确定待定位导航装置在局部邻域内每个时刻的各定位参数的定位离散系数;
7、定位导航步骤,基于各定位参数的定位离散系数,确定待定位导航装置在局部邻域内每个时刻的目标导航位置,对待定位导航装置进行导航向所述目标导航位置运动。
8、优选的,所述每个时刻的各定位参数为每个时刻的卫星经度、卫星纬度、惯性经度及惯性纬度。
9、优选的,所述每个时刻的各定位参数的距离序列和差分序列的构建方法为:
10、将与每个时刻的各定位参数之间的距离最近的多个时刻的定位参数,组成局部邻域内每个时刻的各定位参数的局部序列;
11、计算局部邻域内每个时刻的各定位参数与其局部序列中各定位参数之间的距离,将所有所述距离按照从大到小的排列顺序,组成局部邻域内每个时刻的各定位参数的距离序列;
12、将距离序列的一阶差分结果作为局部邻域内每个时刻的各定位参数的差分序列。
13、优选的,所述确定待定位导航装置在局部邻域内每个时刻的各定位参数的定位干扰因子,包括:
14、获取每个时刻的各定位参数的距离序列中的上四分位数、中位数和下四分位数;
15、将所述中位数与所述上四分位数的差异作为第一差异;将所述中位数与所述下四分位数的差异作为第二差异;
16、将第一差异与第二差异的均值,确定为局部邻域内每个时刻的各定位参数的相对变化差异;
17、获取所述各定位参数的差分序列中元素的离散程度;
18、基于所述相对变化差异和所述离散程度,确定局部邻域内每个时刻的各定位参数的定位干扰因子,其中,所述定位干扰因子分别与所述相对变化差异和所述离散程度呈正协同关系。
19、优选的,所述确定待定位导航装置在局部邻域内每个时刻的各定位参数的定位偏差指数,包括:
20、对局部邻域内每个时刻的卫星纬度的距离序列进行曲线拟合,基于拟合曲线的变化趋势,得到各定位参数的距离序列中各元素的趋势变化系数;
21、根据各定位参数的距离序列中各元素的趋势变化系数的差异变化情况,计算各定位参数的定位变化因子;
22、将所述各定位参数的距离序列中所有元素的趋势变化系数的混乱程度,确定为各定位参数的混乱度;
23、局部邻域内每个时刻的各定位参数的信息变化特征值分别与所述定位变化因子和所述混乱度呈正协同关系;
24、基于所述信息变化特征值和所述定位干扰因子,确定局部邻域内每个时刻的各定位参数的定位偏差指数,其中所述定位偏差指数分别与所述信息变化特征值和所述定位干扰因子呈正协同关系。
25、优选的,所述各定位参数的定位变化因子的计算方法为:
26、计算所述各定位参数的距离序列中所有元素的趋势变化系数的均值,记为第一均值;
27、将所述各定位参数的距离序列中各元素的趋势变化系数与第一均值的差异,作为各元素的相对差异;
28、各定位参数的定位变化因子与所有元素的所述相对差异呈正协同关系。
29、优选的,所述确定待定位导航装置在局部邻域内每个时刻的各定位参数的定位离散系数,包括:
30、计算局部邻域内每个时刻与其余时刻的各定位参数的定位偏差指数之间的差异,作为各定位参数的定位偏差;
31、基于所有的所述定位偏差的分布混乱度,确定局部邻域内每个时刻的各定位参数的定位离散系数。
32、优选的,所述确定待定位导航装置在局部邻域内每个时刻的目标导航位置,包括:
33、基于各定位参数中卫星纬度和惯性纬度的定位离散系数,获得局部邻域内每个时刻的卫星纬度的融合权重和惯性纬度的融合权重;
34、基于局部邻域内每个时刻的卫星纬度和惯性纬度以及对应的融合权重,确定局部邻域内每个时刻的卫星定位融合分量和惯性定位融合分量;
35、将所述每个时刻的卫星定位融合分量与相同时刻的惯性定位融合分量的和,作为局部邻域内每个时刻的融合纬度;
36、针对局部邻域内每个时刻的卫星经度的定位离散系数和惯性经度的定位离散系数,采用与融合纬度相同的方法,得到局部邻域内每个时刻的融合经度;
37、将所述融合纬度和融合经度,作为待定位导航装置在局部邻域内每个时刻的目标导航位置。
38、优选的,所述局部邻域内每个时刻的卫星纬度的融合权重和惯性纬度的融合权重的获取方法为:
39、基于各定位参数中卫星纬度和惯性纬度的定位离散系数,获得局部邻域内每个时刻的卫星纬度和惯性纬度的定位可信程度值,其中所述定位可信程度值与所述定位离散系数呈负协同关系;
40、分别将局部邻域内每个时刻的卫星纬度和惯性纬度的定位可信程度值的归一化结果,作为局部邻域内每个时刻的卫星纬度的融合权重和惯性纬度的融合权重。
41、优选的,所述确定局部邻域内每个时刻的卫星定位融合分量和惯性定位融合分量,包括:
42、将局部邻域内每个时刻的卫星纬度与对应时刻的卫星纬度的融合权重的乘积,作为局部邻域内每个时刻的卫星定位融合分量;
43、将局部邻域内每个时刻的惯性纬度与对应时刻的惯性纬度的融合权重的乘积,作为局部邻域内每个时刻的惯性定位融合分量。
44、本技术至少具有如下有益效果:
45、本技术通过分析局部邻域内每个时刻的各定位参数的分布差异,确定定位干扰因子,其有益效果在于考虑了通过近邻位置的距离分析定位过程中出现偏差程度,反映定位参数的准确性;确定局部邻域内每个时刻的各定位参数的定位偏差指数,其有益效果在于考虑了各定位参数在定位过程中受外界的干扰影响程度;计算局部邻域内每个时刻的各定位参数的定位离散系数,其有益效果在于反映了导航定位过程中出现定位偏差的离散特征,考虑了定位信息的真实性;计算各定位参数的融合权重,确定待定位导航装置在局部邻域内每个时刻的目标导航位置,对所述待定位导航装置进行导航向所述目标导航位置运动,其有益效果在于相比于现有技术利用以固定的权重对滤波处理后的经纬度进行融合,因定位过程中受外界干扰的影响,导致对待定位导航装置进行导航定位的精度较差,本技术通过经纬度数据的定位可信程度值,获得各经纬度的融合权重,提高对待定位导航装置进行导航定位的精度。
- 还没有人留言评论。精彩留言会获得点赞!