光学多通池系统、气体吸收数据探测方法及终端设备与流程
本技术涉及光学多通池,尤其涉及一种光学多通池系统、气体吸收数据探测方法及终端设备。
背景技术:
1、提升气体探测器的灵敏度一般需要采用光程更长的光学多通池,但是光程越长,光学多通池体积越大,不能无限制地增加光程来提升灵敏度。现有的光学多通池技术,例如,赫里奥特(herriot)池、怀特(white)池等,无法满足工业领域对高灵敏度、小体积的气体探测器的需求。
技术实现思路
1、有鉴于此,本技术实施例提供了一种光学多通池系统、气体吸收数据探测方法、终端设备及存储介质,以解决现有的光学多通池技术无法满足工业领域对高灵敏度、小体积的气体探测器的需求的问题。
2、本技术实施例的第一方面提供一种光学多通池系统,包括:
3、光学多通池,包括输入端和输出端;以及
4、驱动机构,用于在气体吸收数据的探测过程的每次数据采集过程中,驱动所述光学多通池的m个子反射镜沿z轴方向周期性往返运动,所述z轴方向平行于所述光学多通池的光轴;
5、其中,m≥1,所述探测过程为:在所述光学多通池中充入有待探测气体的情况下,探测光束从所述输入端输入、在所述光学多通池内多次反射之后形成干涉光束从所述输出端输出,整个所述探测过程中探测光束的波长在预设波长范围内变化,每次数据采集过程中探测光束的波长恒定或在预设波长调制范围内变化。
6、本技术实施例的第一方面通过提供一种包括光学多通池和驱动机构的光学多通池系统,在气体吸收数据的探测过程的每次数据采集过程中,基于驱动机构驱动光学多通池的所有子反射镜中的m(m≥1)个子反射镜沿平行于光学多通池的光轴的z轴方向周期性往返运动,能够在不显著增加光学多通池系统的体积的情况下,在输出端获得m个子反射镜在不同位置处时的干涉光束,基于这些干涉光束,可以获得光学噪声平滑的气体吸收数据,从而能够提高基于光学多通池系统探测气体吸收数据时的灵敏度。
7、在一个实施例中,所述光学多通池还包括:
8、所述输入端,用于输入探测光束;
9、所述输出端,用于输出干涉光束;
10、主凹面反射镜;以及
11、两个子反射镜,所述子反射镜为凹面反射镜,所述主凹面反射镜的反射面与所述子反射镜的反射面相对且间隔设置构成反射腔,所述反射腔的光轴垂直于所述主凹面反射镜的焦平面;
12、其中,所述输入端设置于所述主凹面反射镜,所述输出端设置于所述主凹面反射镜或任一所述子反射镜。
13、本技术实施例通过提供一种包括主凹面反射镜和两个子反射镜的光学多通池,在气体吸收数据的探测过程的每次数据采集过程中,基于驱动机构驱动光学多通池的两个子反射镜中的至少一个沿平行于光学多通池的光轴的z轴方向周期性往返运动,能够在不显著增加光学多通池系统的体积的情况下,在输出端获得m个子反射镜在不同位置处时的干涉光束,基于这些干涉光束,可以获得光学噪声平滑的气体吸收数据,从而能够提高基于光学多通池系统探测气体吸收数据时的灵敏度。
14、在一个实施例中,所述光学多通池包括:
15、所述输入端,用于输入探测光束;
16、所述输出端,用于输出干涉光束;
17、主凹面反射镜;
18、主平面反射镜,所述主凹面反射镜的反射面与所述主平面反射镜的反射面相对且间隔设置构成反射腔,所述反射腔的光轴垂直于所述主凹面反射镜的焦平面;以及
19、n个子反射镜,所述子反射镜设置于所述主平面反射镜,所述n个子反射镜的反射面朝向所述主凹面反射镜设置;
20、其中,n≥m,所述输入端设置于所述主凹面反射镜或所述主平面反射镜,所述输出端设置于所述主凹面反射镜、所述主平面反射镜或任一所述子反射镜。
21、本技术实施例通过提供一种包括主凹面反射镜、主平面反射镜以及n个子反射镜的光学多通池,在气体吸收数据的探测过程的每次数据采集过程中,基于驱动机构驱动光学多通池的n个子反射镜中的m个沿平行于光学多通池的光轴的z轴方向周期性往返运动,能够在不显著增加光学多通池系统的体积的情况下,在输出端获得m个子反射镜在不同位置处时的干涉光束,基于这些干涉光束,可以获得光学噪声平滑的气体吸收数据,从而能够提高基于光学多通池系统探测气体吸收数据时的灵敏度。
22、在一个实施例中,所述光学多通池包括:
23、所述输入端,用于输入探测光束;
24、所述输出端,用于输出干涉光束;
25、主凹面反射镜,焦距为f、曲率半径为r且具有像差;
26、主平面反射镜,所述主平面反射镜的反射面到所述主凹面反射镜的光心的距离为l1=(1+x1)f,-1<x1<1;以及
27、子反射镜,所述子反射镜为凹面反射镜,焦距为f0、曲率半径为r0且设置于所述主平面反射镜,所述子反射镜的反射面在所述主平面反射镜的反射面上的正投影面积小于所述主平面反射镜的反射面的面积,所述子反射镜的光心到所述主凹面反射镜的光心的距离为l2=(1+x2)f,r0=mr,-1<x2<1,x1和x2不同时为0,m>0;
28、其中,所述输入端设置于所述主凹面反射镜或所述主平面反射镜,所述输出端设置于所述主凹面反射镜、所述主平面反射镜或所述子反射镜,所述主凹面反射镜的反射面与所述主平面反射镜的反射面和所述子反射镜的反射面相对且间隔设置构成反射腔,所述反射腔的光轴垂直于所述平面反射镜的反射面且经过所述主凹面反射镜的光心和焦点。
29、本技术实施例通过提供一种包括主凹面反射镜、主平面反射镜以及子反射镜的光学多通池,在气体吸收数据的探测过程的每次数据采集过程中,基于驱动机构驱动子反射镜沿平行于光学多通池的光轴的z轴方向周期性往返运动,能够在不显著增加光学多通池系统的体积的情况下,在输出端获得m个子反射镜在不同位置处时的干涉光束,基于这些干涉光束,可以获得光学噪声平滑的气体吸收数据,从而能够提高基于光学多通池系统探测气体吸收数据时的灵敏度。
30、在一个实施例中,所述z轴方向包括平行且相反的z轴正方向和z轴负方向;
31、所述子反射镜沿所述z轴正方向运动时的位置变化值为正值;
32、所述子反射镜沿所述z轴负方向运动时的位置变化值为负值;
33、所述m个子反射镜沿所述z轴方向周期性往返运动时,
34、其中,δ表示所述m个子镜在z轴方向上的位置变化值之和,λ表示所述探测光束的波长。
35、本技术实施例通过将m个子反射镜沿z轴方向周期性往返运动时,在z轴方向上的位置变化值之和限定在探测光束的波长的0.25~10倍范围内,当探测光束的波长范围在0.2um~12um内时,子反射镜在z轴方向上的位置变化范围在微米量级,驱动机构可以使用微米量级的微驱动机构,从而可以有效降低光学多通池系统的体积。
36、本技术实施例的第二方面提供一种气体吸收数据探测方法,基于第一方面的第四种实现方式提供的光学多通池系统实现,所述气体吸收数据探测方法包括:
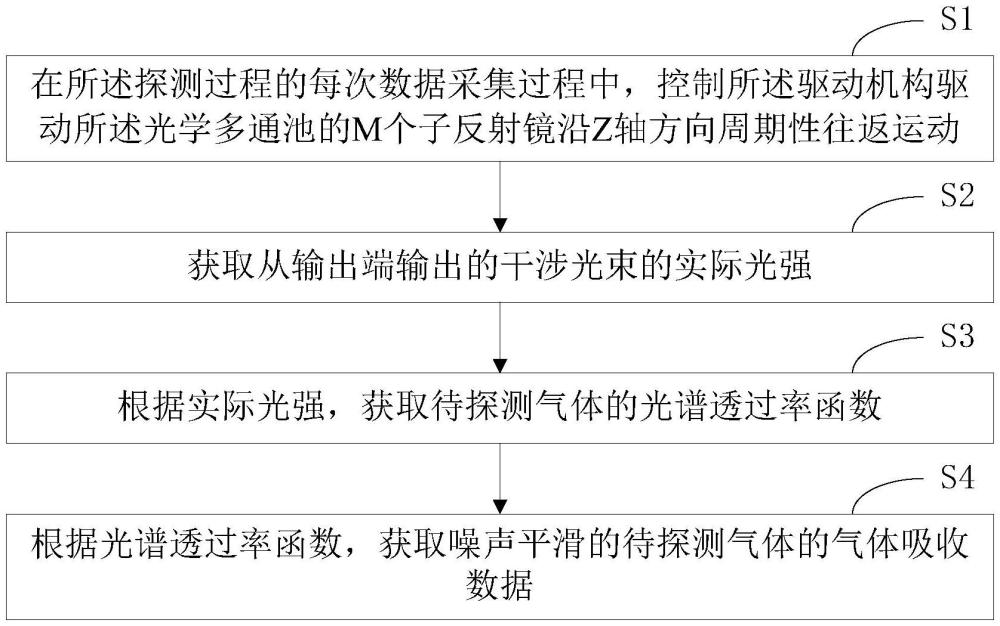
37、在所述探测过程的每次数据采集过程中,控制所述驱动机构驱动所述光学多通池的m个子反射镜沿z轴方向周期性往返运动;
38、获取从所述输出端输出的干涉光束的实际光强;
39、根据所述实际光强,获取所述待探测气体的光谱透过率函数;
40、根据所述光谱透过率函数,获取噪声平滑的所述待探测气体的气体吸收数据。
41、本技术实施例的第二方面通过提供一种气体吸收数据探测方法,在探测过程的每次数据采集过程中,控制驱动机构驱动光学多通池的m个子反射镜沿z轴方向周期性往返运动,在输出端获得m个子反射镜在不同位置处时的干涉光束,基于这些干涉光束的实际光强,获取待探测气体的光谱透过率函数,从而可以根据光谱透过率函数,获得光学噪声平滑的待探测气体的气体吸收数据。
42、在一个实施例中,所述的气体吸收数据探测方法基于直接吸收法的最大最小值法实现,每次数据采集过程中所述探测光束的波长恒定;
43、根据所述实际光强,获取所述待探测气体的光谱透过率函数,包括:
44、根据每次数据采集过程中获取的所有所述实际光强中的最大值和最小值,获取所述待探测气体的光谱透过率函数;
45、其中,
46、本技术实施例通过基于直接吸收法的最大最小值法实现气体吸收数据探测方法,将每次数据采集过程中探测光束的波长设置为恒定波长,将m个子反射镜沿z轴方向周期性往返运动时,在z轴方向上的位置变化值之和限定在探测光束的波长的0.5~10倍范围内,不要求位置变化值之和是0.5倍的探测光束的波长的整数倍,对驱动机构的控制精度要求低,直接根据每次数据采集过程中获取的所有实际光强中的最大值和最小值,获取待探测气体的光谱透过率函数,算法简单、计算量小,可以有效提高探测效率。
47、在一个实施例中,所述光谱透过率函数的表达式为:
48、
49、其中,s(λ)表示所述光谱透过率函数,out(λ,δ)表示所述实际光强,max(out(λ,δ))表示所有所述实际光强中的最大值,min(out(λ,δ))表示所有所述实际光强中的最小值。
50、在一个实施例中,所述的气体吸收数据探测方法基于直接吸收法的平均值法实现,每次数据采集过程中所述探测光束的波长恒定;
51、根据所述实际光强,获取所述待探测气体的光谱透过率函数,包括:
52、根据每次数据采集过程中获取的n个不同位置变化值之和处的实际光强的平均值,获取所述待探测气体的光谱透过率函数;
53、其中,δμ=(μ-1)δ0,μ=1,2,3,…,n,δ0>0且δ0为常数,n≥2;
54、δμ表示所述n个不同位置变化值之和中的第μ个位置变化值之和,δn表示所述n个不同位置变化值之和中的最大值。
55、本技术实施例通过基于直接吸收法的平均值法实现气体吸收数据探测方法,将每次数据采集过程中探测光束的波长设置为恒定波长,将m个子反射镜沿z轴方向周期性往返运动时,在z轴方向上的n个位置变化值之和设置为线性变化且均在探测光束的波长的0.25~10倍范围内,然后根据每次数据采集过程中获取的n个不同位置变化值之和处的实际光强的平均值,获取待探测气体的光谱透过率函数,可以有效提高探测效率的精度。
56、在一个实施例中,所述光谱透过率函数的表达式为:
57、
58、其中,k=1,2,3,…,m=2,3,4,…;
59、n=mk;
60、
61、s(λ)表示所述光谱透过率函数,out(λ,δμ)表示所述第μ个位置变化值之和处的实际光强。
62、在一个实施例中,所述的气体吸收数据探测方法基于谐波法的平均值法实现,每次数据采集过程中所述探测光束的波长在预设波长调制范围内变化;
63、所述根据所述实际光强,获取所述待探测气体的光谱透过率函数,包括:
64、根据每次数据采集过程中获取的n个不同位置变化值之和处的实际光强,获取对应的n个不同位置变化值之和处的谐波光谱函数;
65、根据所述n个不同位置变化值之和处的谐波光谱函数的平均值,获取所述待探测气体的光谱透过率函数;
66、其中,所述预设波长调制范围在所述预设波长范围内,δμ=(μ-1)δ0,μ=1,2,3,…,n,δ0>0且δ0为常数,n≥2;
67、δμ表示所述n个不同位置变化值之和中的第μ个位置变化值之和,δn表示所述n个不同位置变化值之和中的最大值。
68、本技术实施例通过基于谐波法的平均值法实现气体吸收数据探测方法,将每次数据采集过程中探测光束的波长设置为在预设波长调制范围内变化,将m个子反射镜沿z轴方向周期性往返运动时,在z轴方向上的n个位置变化值之和设置为线性变化且均在探测光束的波长的0.25~10倍范围内,然后根据每次数据采集过程中获取的n个不同位置变化值之和处的实际光强,获取对应的n个不同位置变化值之和处的谐波光谱函数,再根据n个不同位置变化值之和处的谐波光谱函数的平均值,获取待探测气体的光谱透过率函数,可以有效提高探测效率的精度。
69、在一个实施例中,所述n个不同位置变化值之和处的谐波光谱函数的平均值的表达式为:
70、
71、其中,k=1,2,3,…,m=2,3,4,…;
72、n=mk;
73、
74、hn(λ)表示所述n个不同位置变化值之和处的谐波光谱函数的平均值,s(λ+αφ)表示所述光谱透过率函数,α表示所述探测光束的波长调制系数,φ表示用于发射所述探测光束的光源器件的波长调制参量,n表示谐波阶数,表示n阶谐波对应的相位偏移。
75、本技术实施例的第三方面提供一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现本技术实施例的第二方面提供的气体吸收数据探测方法的步骤。
76、本技术实施例的第四方面提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现本技术实施例的第二方面提供的气体吸收数据探测方法的步骤。
77、可以理解的是,上述第三方面和第四方面的有益效果可以参见上述第二方面中的相关描述,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!