一种基于图像识别的铜线导体截面的检测系统
本发明涉及图像处理,具体涉及一种基于图像识别的铜线导体截面的检测系统。
背景技术:
1、在新能源汽车迅猛发展的背景下,电机作为其核心组成部分,其性能直接影响到车辆的能效、续航能力以及整体驾驶体验,其中,电磁扁线因其独特的物理和电气特性,在电流承载、传输效率、散热性能、材料经济性及空间利用率方面展现出了显著优势,成为了推动新能源汽车电机技术进步的关键因素;扁线电机凭借高能量效率、高功率密度、高集成度以及成本控制能力,成为业界追求高性能和高性价比解决方案的理想选择。
2、然而,扁平电磁线的制造工艺面临着诸多挑战,尤其是在成型过程中,由于导体截面各点受力分布的不均衡性,极易引发一系列质量问题,包括但不限于表面毛刺的形成、气泡的残留、裂纹的出现、宽度和厚度尺寸的精度偏差,以及导体边缘r角的形状不理想等;这些问题不仅影响了扁线电机的电气性能,如增加了电阻和降低了散热效率,还可能导致电机在长时间运行或极端工况下出现故障,严重时甚至缩短了新能源汽车的使用寿命;传统的检测手段,如人工目视检查或接触式测量,已经难以满足现代生产线上对速度、精度及一致性的高要求。
技术实现思路
1、本发明的目的是为了解决上述问题,设计了一种基于图像识别的铜线导体截面的检测系统。
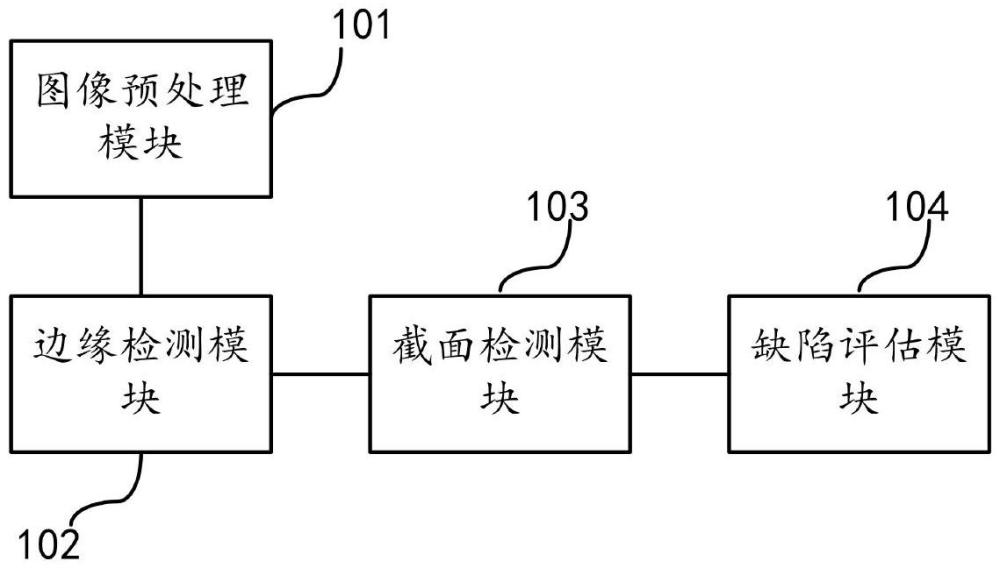
2、本发明提供一种基于图像识别的铜线导体截面的检测系统,所述基于图像识别的铜线导体截面的检测系统包括图像预处理模块、边缘检测模块、截面检测模块和缺陷评估模块,其中,
3、图像预处理模块,用于通过高分辨率相机对扁线电机的铜线导体进行多角度拍摄,获得原始截面图像,对所述原始截面图像进行预处理,通过灰度化处理、滤除噪声处理图像增强处理和标准化处理,完成图像的预处理,得到预处理后的原始截面图像;
4、边缘检测模块,用于采用canny算子对预处理后的原始截面图像进行边缘检测,基于自适应阈值确定边缘点,并对自适应阈值处理后的图像进行灰度腐蚀处理,提取铜线导体截面轮廓边缘图像,得到目标检测图像;
5、截面检测模块,用于将所述目标检测图像输入截面检测模型,通过所述截面检测模型对所述目标检测图像进行特征提取,检测铜线导体截面中缺陷,并输出截面检测结果;
6、缺陷评估模块,用于基于所述截面检测结果确定铜线导体缺陷类型和位置,评估缺陷的严重程度,并判断缺陷的严重程度是否超过预设阈值,若未超过预设阈值则确定铜线导体为合格产品,若超过预设阈值则铜线导体记录为不合格,并生成缺陷信息,其中缺陷的严重程度包括缺陷面积占比、缺陷深度、缺陷长度。
7、可选的,在本发明的第一种实现方式中,所述图像预处理模块包括灰度化处理子模块、划分子模块、第一计算子模块、第二计算子模块、比较子模块、图像增强处理子模块和标准化处理子模块,其中,
8、灰度化处理子模块,用于获取高分辨率相机拍摄的原始截面图像,对所述原始截图图像进行灰度化处理,得到第一截面图像;
9、划分子模块,用于以所述第一截面图像中的每个像素为中心,基于kuwahara滤波器将窗口划分为左上、右上、左下和右下四个子区域图像;
10、第一计算子模块,用于计算窗口内不同子区域图像的像素灰度值方差,并选择方差最小子区域图像的灰度均值作为窗口中心像素点的灰度值;
11、第二计算子模块,用于计算每一个灰度值的类间方差,将最大类间方差所对应的灰度值确定为最佳阈值;
12、比较子模块,用于比较所述第一截面图像中每一个像素灰度值与最佳阈值,判断该像素是否属于噪声点,若为噪声点,则利用灰度值中值点替代噪声点灰度值以滤除噪声,得到第二截面图像;
13、图像增强处理子模块,用于对所述第二截面图像进行图像增强处理,以增强图像的对比度,得到第三截面图像;
14、标准化处理子模块,用于采用最小-最大标准化将所述第三截面图像的像素值进行标准化处理,得到预处理后的原始截面图像。
15、可选的,在本发明的第二种实现方式中,所述图像增强处理子模块包括均衡化处理单元、伽马校正处理单元和加权融合单元,其中,
16、均衡化处理单元,用于将所述第二截面图像分割成多个8×8连续且不重叠的子块,计算出每个子块中的直方图和裁剪幅值,基于所述裁剪幅值对相应子块进行裁剪,得到新直方图,对每个子块的新直方图进行均衡化处理;
17、伽马校正处理单元,用于利用双线性插值法重构图像中各个像素点的值,通过伽马校正处理得到高对比度高的图像;
18、加权融合单元,用于对所述第二截面图像进行msr算法增强处理,并与对比度高的图像进行加权融合,得到融合图像,对融合后的图像进行伽马校正,得到第三截面图像。
19、可选的,在本发明的第三种实现方式中,所述边缘检测模块包括检测子模块、平滑移动子模块、对比子模块和腐蚀处理子模块,其中,
20、检测子模块,用于获取预处理后的原始截面图像,从水平方向、竖直方向、45°和135°方对角线方向对预处理后的原始截面图像进行检测,计算梯度分量;
21、平滑移动子模块,用于利用3×3矩阵在预处理后的原始截面图像内平滑移动,将3×3平滑框内像素点的灰度平均值作为自适应阈值;
22、对比子模块,用于将3×3平滑框内的自适应阈值与中心像素点的梯度分量进行对比,若中心点的梯度分量大于自适应阈值,则该点是边缘点,若中心点的梯度分量小于等于自适应阈值的1/2,则该点不是边缘点,若中心点的梯度分量介于自适应阈值的1/2与整个自适应阈值之间,则该点与上一中心像素点相同;
23、腐蚀处理子模块,用于对自适应阈值处理后的原始截面图像进行灰度腐蚀处理,提取铜线导体截面轮廓边缘图像,得到目标检测图像。
24、可选的,在本发明的第四种实现方式中,所述截面检测模块包括输入子模块、特征融合子模块、特征提取子模块和卷积处理子模块,其中,
25、输入子模块,用于将所述目标检测图像输入截面检测模型中,其中所述截面检测模型基于yolov5网络构建;
26、特征融合子模块,用于通过1×1的卷积核减少通道数至原来的一半,使用3×3的卷积核使通道数翻倍,采用卷积块注意机制对输入的目标检测图像捕获特征,使用卷积特征相加、通道数不变方式进行特征融合,得到卷积后的特征图,其中所述卷积块注意机制包括通道注意力机制和空间注意力机制;
27、特征提取子模块,用于采用所述截面检测模型的特征提取层对卷积后的特征图进行特征提取,再通过所述截面检测模型配置的四个检测层,进行上采样和下采样处理,输出特征图尺寸变为80×80、40×40、20×20和10×10;
28、卷积处理子模块,用于对每个尺度的特征图,生成边界框和置信度分数,标识目标位置,通过一个卷积模块进行卷积,作为残差连接在通道数上进行维度拼接,通过卷积处理完成截面检测结果的输出。
29、可选的,在本发明的第五种实现方式中,所述特征融合子模块包括通道注意力单元和空间注意力单元,其中,
30、通道注意力单元,用于使用最大池化和平均池化处理对输入的目标检测图像特征进行空间信息汇总,得到两个1×1×c的通道描述,将这两个描述输入共享多层感知机内,将得到的两个特征元素相加,经过一个sigmoid函数激活得到通道注意力,其中共享多层感知机是由一个多层感知机和一个隐藏层组成;
31、空间注意力单元,用于将输入的目标检测图像沿着通道轴采用平均池化和最大池化,得到平均池化后的特征和最大池化后的特征,将平均池化后的特征和最大池化后的特征拼接起来得到一个特征描述符,再经过一个7×7的卷积层和sigmoid函数激活得到空间注意力。
32、可选的,在本发明的第六种实现方式中,所述特征提取子模块包括全局池化单元和特征增强单元,其中,
33、全局池化单元,用于对卷积后的特征图进行卷积和激活处理,生成初始特征图,通过全局池化操作提取出所述初始特征图全局背景的近似值;
34、特征增强单元,用于将全局背景的近似值和所述初始特征图应用于特征增强函数,以增强缺陷的纹理和轮廓,生成新的特征图;
35、特征增强函数:其中f为特征增强函数的输出,f0为初始特征图,fb为全局平均池化输出的全局背景的近似值,μ为小常数防止出现除数为0的情况,s为增强系数函数。
36、可选的,在本发明的第七种实现方式中,实现基于图像识别的铜线导体截面的检测系统的方法包括以下步骤:
37、通过高分辨率相机对扁线电机的铜线导体进行多角度拍摄,获得原始截面图像,对所述原始截面图像进行预处理,通过灰度化处理、滤除噪声处理图像增强处理和标准化处理,完成图像的预处理,得到预处理后的原始截面图像;
38、采用canny算子对预处理后的原始截面图像进行边缘检测,基于自适应阈值确定边缘点,并对自适应阈值处理后的图像进行灰度腐蚀处理,提取铜线导体截面轮廓边缘图像,得到目标检测图像;
39、将所述目标检测图像输入截面检测模型,通过所述截面检测模型对所述目标检测图像进行特征提取,检测铜线导体截面中缺陷,并输出截面检测结果;
40、基于所述截面检测结果确定铜线导体缺陷类型和位置,评估缺陷的严重程度,并判断缺陷的严重程度是否超过预设阈值,若未超过预设阈值则确定铜线导体为合格产品,若超过预设阈值则铜线导体记录为不合格,并生成缺陷信息,其中缺陷的严重程度包括缺陷面积占比、缺陷深度、缺陷长度。
41、可选的,在本发明的第八种实现方式中,所述通过高分辨率相机对扁线电机的铜线导体进行多角度拍摄,获得原始截面图像,对所述原始截面图像进行预处理,通过灰度化处理、滤除噪声处理图像增强处理和标准化处理,完成图像的预处理,得到预处理后的原始截面图像,包括:
42、获取高分辨率相机拍摄的原始截面图像,对所述原始截图图像进行灰度化处理,得到第一截面图像;
43、以所述第一截面图像中的每个像素为中心,基于kuwahara滤波器将窗口划分为左上、右上、左下和右下四个子区域图像;
44、计算窗口内不同子区域图像的像素灰度值方差,并选择方差最小子区域图像的灰度均值作为窗口中心像素点的灰度值;
45、计算每一个灰度值的类间方差,将最大类间方差所对应的灰度值确定为最佳阈值;
46、比较所述第一截面图像中每一个像素灰度值与最佳阈值,判断该像素是否属于噪声点,若为噪声点,则利用灰度值中值点替代噪声点灰度值以滤除噪声,得到第二截面图像;
47、对所述第二截面图像进行图像增强处理,以增强图像的对比度,得到第三截面图像;
48、采用最小-最大标准化将所述第三截面图像的像素值进行标准化处理,得到预处理后的原始截面图像。
49、可选的,在本发明的第九种实现方式中,所述采用canny算子对预处理后的原始截面图像进行边缘检测,基于自适应阈值确定边缘点,并对自适应阈值处理后的图像进行灰度腐蚀处理,提取铜线导体截面轮廓边缘图像,得到目标检测图像包括:
50、获取预处理后的原始截面图像,从水平方向、竖直方向、45°和135°方对角线方向对预处理后的原始截面图像进行检测,计算梯度分量;
51、利用3×3矩阵在预处理后的原始截面图像内平滑移动,将3×3平滑框内像素点的灰度平均值作为自适应阈值;
52、将3×3平滑框内的自适应阈值与中心像素点的梯度分量进行对比,若中心点的梯度分量大于自适应阈值,则该点是边缘点,若中心点的梯度分量小于等于自适应阈值的1/2,则该点不是边缘点,若中心点的梯度分量介于自适应阈值的1/2与整个自适应阈值之间,则该点与上一中心像素点相同;
53、对自适应阈值处理后的原始截面图像进行灰度腐蚀处理,提取铜线导体截面轮廓边缘图像,得到目标检测图像。
54、本发明提供的技术方案中,通过高分辨率相机对扁线电机的铜线导体进行多角度拍摄,获得原始截面图像,对所述原始截面图像进行预处理,通过灰度化处理、滤除噪声处理图像增强处理和标准化处理,完成图像的预处理,得到预处理后的原始截面图像;采用canny算子对预处理后的原始截面图像进行边缘检测,基于自适应阈值确定边缘点,并对自适应阈值处理后的图像进行灰度腐蚀处理,提取铜线导体截面轮廓边缘图像,得到目标检测图像;将所述目标检测图像输入截面检测模型,通过所述截面检测模型对所述目标检测图像进行特征提取,检测铜线导体截面中缺陷,并输出截面检测结果;基于所述截面检测结果确定铜线导体缺陷类型和位置,评估缺陷的严重程度,并判断缺陷的严重程度是否超过预设阈值,若未超过预设阈值则确定铜线导体为合格产品,若超过预设阈值则铜线导体记录为不合格,并生成缺陷信息;本发明能够自动化、无损地评估铜线导体截面的质量,提高检测效率和准确度。
- 还没有人留言评论。精彩留言会获得点赞!